КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Устойчивый объект
|
|
|
|
Исследование объекта первого порядка, заданного апериодическим звеном.
Пример выполнения работы
Дано:
 ,
,  ,
,  ,
,  .
.
Рассмотрим объект первого порядка, описываемый уравнением
 ,
,  (1)
(1)
Структурная схема объекта показана на рисунке 1.
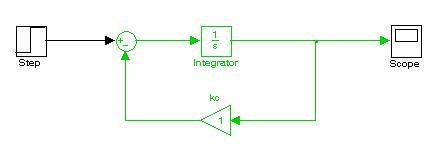
Рисунок 1 - Структурная схема объекта первого порядка
Построим и исследуем объект с  и получим переходный процесс вида (см. рисунок 2), имеющий время регулирования
и получим переходный процесс вида (см. рисунок 2), имеющий время регулирования  .
.
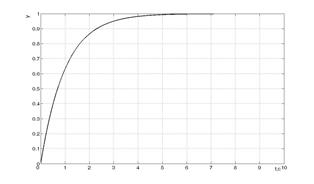
Рисунок 2 - Переходный процесс в объекте первого порядка при  .
.
Построим адаптивное управление объектом (1), задавая желаемые переходные процессы объекта с адаптивным управлением с помощью эталонной модели:
 . (2)
. (2)
Задавая  , сравним траектории эталонной модели (см. рисунок 3,
, сравним траектории эталонной модели (см. рисунок 3,  ) и самого объекта управления.
) и самого объекта управления.
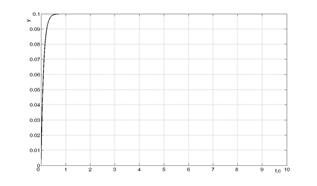
Рисунок 3 - Переходный процесс в эталонном объекте первого порядка при  .
.
Как видно, у эталонной модели время переходного процесса и заданное установившееся значение в 10 раз меньше, чем у объекта.
Построим систему адаптивного управления с параметрической настройкой (без огрубления).
 ; (3)
; (3)
 (4)
(4)
где  ,
,  – настраиваемые коэффициенты адаптивного закона;
– настраиваемые коэффициенты адаптивного закона;  – положительные коэффициенты усилений настроек;
– положительные коэффициенты усилений настроек;  – ошибка – разность между переменными состояния объекта (1) и эталонной модели (2).
– ошибка – разность между переменными состояния объекта (1) и эталонной модели (2).
Проведем исследование адаптивной системы (1)÷(4) при следующих параметрах:
1)  ,
,  ,
,  , $
, $
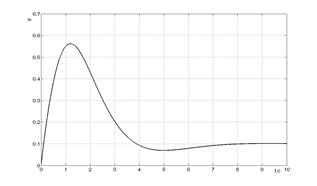
Рисунок 4 - Переходный процесс при 
.
.
.
n) , , Р =1, 
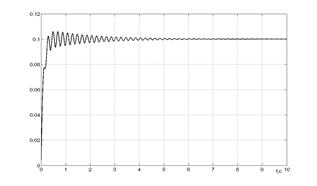
Рисунок n - Переходный процесс при
Для системы , , , установившиеся значения настроек  и
и  по графикам переходных процессов будут:
по графикам переходных процессов будут:  ,
,  . Расчетные значения:
. Расчетные значения:  ,
,  .
.
Рассмотрев переходные процессы, делаем вывод о том, что в устойчивом объекте можно добиться желаемого быстродействия, вводя адаптивное управление с параметрической настройкой. При этом, чем больше коэффициенты усиления  , тем выше колебания, возникающие в системе и меньше перерегулирование, наконец, при значениях больше 10000 наступает момент, когда траектории эталонной модели и объекта управления совпадают, а это значит, что
, тем выше колебания, возникающие в системе и меньше перерегулирование, наконец, при значениях больше 10000 наступает момент, когда траектории эталонной модели и объекта управления совпадают, а это значит, что  и
и  (в чем легко убедится, посмотрев установившиеся значения на выходах настроек адаптивного управления регулятора).
(в чем легко убедится, посмотрев установившиеся значения на выходах настроек адаптивного управления регулятора).
ЗАМЕЧАНИЕ. При равенстве  дифференциальное уравнение настроек для коэффициента
дифференциальное уравнение настроек для коэффициента  можно исключить из рассмотрения адаптивной системы (1)÷(4).
можно исключить из рассмотрения адаптивной системы (1)÷(4).
|
|
|
|
|
Дата добавления: 2015-07-13; Просмотров: 341; Нарушение авторских прав?; Мы поможем в написании вашей работы!