КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Анализ заданной структурной схемы иее преобразования для расчетов
|
|
|
|
Введение
Теория автоматического управления и теория автоматического регулирования, информатика и техническая кибернетика являются научной базой теории автоматического управления техническими системами.
Основной задачей теории автоматического регулирования является воспроизведение с наименьшей погрешностью некоторого входного сигнала, при этом цель регулирования состоит к сведению к минимуму ошибки между входным и выходным сигналами.
В теории автоматического управления решается задача верхнего уровня, на котором формируется управляющее воздействие для автоматического регулятора. Система автоматического управления является верхним уровнем в иерархии управления объектами. Система автоматического регулирования играет роль нижнего уровня, на котором выполняется коррекция отклонений траектории движения объекта, соответствующей управляющему сигналу, из-за действия случайных возмущений и помех, неопределенности описания объекта и т.д. В общем случае, система автоматического регулирования связана непосредственно с процессами производства и остается базой для построения систем автоматического управления.
Целью данной работы является проведение анализа и синтеза автоматизированной электромеханической системы в соответствии с индивидуальным заданием.
Обобщенная структурная схема автоматизированной электромеханической системы выглядит следующим образом:
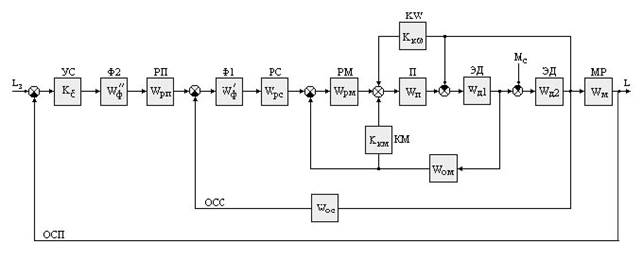
Рис.1.1. Обобщенная структурная схема автоматизированной электромеханической системы
Структура системы, приведенной на рис.1.1, является линейной и представляет класс систем трехконтурного подчиненного регулирования. Первый (внутренний) контур охвачен отрицательной обратной связью по моменту ОСМ, второй – отрицательной обратной связью по скорости ОСС, третий – отрицательной обратной связью по положению ОСП.
Каждый контур имеет свой регулятор: РМ (момента), РС (скорости), РП (положения). Работают эти контуры в строгой подчиненности от внутреннего к внешнему. Когда один выполняет свои функции, другие ему не мешают, ожидая своей очереди.
Главная задача системы – обеспечить для рабочего механизма требуемые движения через скорость w, перемещения L и движущие силы от момента двигателя М с заданной точностью и быстродействием. Величины М, w, L являются выходными и обеспечиваются электродвигателем, представленным двумя звеньями с передаточными функциями:
где p – оператор Лапласа; KД1 – добротность механической характеристики двигателя:
В соответствии с заданным вариантом запишем исходные данные в таблицы 1.1 – 1.3:
Таблица 1.1. Вариант структурной схемы
| ККМ | ККW | ОСМ | ОСС | ОСП | Dw, % | DL, % |
| - | - | + | + | + | - |
*Здесь:  – токовая компенсация;
– токовая компенсация;  – компенсация ЭДС электродвигателя;
– компенсация ЭДС электродвигателя;  – отрицательная обратная связь по току (моменту);
– отрицательная обратная связь по току (моменту);  – отрицательная обратная связь по скорости;
– отрицательная обратная связь по скорости;  – отрицательная обратная связь по положению;
– отрицательная обратная связь по положению;  – ошибка стабилизации скорости;
– ошибка стабилизации скорости;  – ошибка стабилизации перемещения.
– ошибка стабилизации перемещения.
Таблица 1.2. Вариант параметров структурной схемы
| ТМ/ТЭ | ТП, с | КП | ТОМ, мс | ТОС, мс | tПП, с |
| 0.01 | 0.05 |
*Здесь:  – электромагнитная постоянная времени (мс);
– электромагнитная постоянная времени (мс);  – электромеханическая постоянная времени (мс);
– электромеханическая постоянная времени (мс);  – время переходного процесса;
– время переходного процесса;  – коэффициент усиления по напряжению (безразмерная величина);
– коэффициент усиления по напряжению (безразмерная величина);  и
и  – постоянные времени фильтров обратных связей по моменту и скорости соответственно;
– постоянные времени фильтров обратных связей по моменту и скорости соответственно;  – постоянная времени, определяющая инерционность преобразователя.
– постоянная времени, определяющая инерционность преобразователя.
*Здесь:  – номинальная мощность двигателя;
– номинальная мощность двигателя;  – номинальное количество оборотов;
– номинальное количество оборотов;  – номинальное значение тока;
– номинальное значение тока;  – активное сопротивление двигателя;
– активное сопротивление двигателя;  – активное сопротивление цепи якоря двигателя;
– активное сопротивление цепи якоря двигателя;  – момент инерции системы.
– момент инерции системы.  (номинальное напряжение якоря двигателя).
(номинальное напряжение якоря двигателя).
Параметры, свойственные только обратной связи по положению, взяты для всех вариантов заданий одинаковыми:  (передаточное число редуктора от двигателя к механизму);
(передаточное число редуктора от двигателя к механизму);  (коэффициент чувствительности датчика положения).
(коэффициент чувствительности датчика положения).
Ряд параметров, необходимых для анализа, преобразования и расчетов (прямых, косвенных и промежуточных) необходимо рассчитать дополнительно:
 – скорость двигателя, – номинальное количество оборотов (об/мин);
– скорость двигателя, – номинальное количество оборотов (об/мин);
 – машинная постоянная,
– машинная постоянная,  – номинальное значение тока (А); – активное сопротивление двигателя (Ом);
– номинальное значение тока (А); – активное сопротивление двигателя (Ом);
 – номинальный момент двигателя;
– номинальный момент двигателя;
 – скорость холостого хода для двигателей постоянного тока;
– скорость холостого хода для двигателей постоянного тока;
 – снижение скорости двигателя при номинальном моменте нагрузки относительно скорости холостого хода (без нагрузки);
– снижение скорости двигателя при номинальном моменте нагрузки относительно скорости холостого хода (без нагрузки);
 – добротность механической характеристики двигателя;
– добротность механической характеристики двигателя;
 – жесткость механической характеристики;
– жесткость механической характеристики;
 – электромеханическая постоянная времени, – активное сопротивление цепи якоря двигателя (Ом);
– электромеханическая постоянная времени, – активное сопротивление цепи якоря двигателя (Ом);
 – электромагнитная постоянная времени в цепи якоря;
– электромагнитная постоянная времени в цепи якоря;
 – коэффициент обратной связи по скорости;
– коэффициент обратной связи по скорости;
Результаты расчетов представим в виде таблицы 1.4
Таблица 1.4.
| С | wн | w0 | Dwн | Мн | Кд1 | Кд2 | Кос | Тм | Тэ | Kkw |
| 1.283 | 157.1 | 171.4 | 28.67 | 23.615 | 0.824 | 1.214 | 0.064 | 0.182 | 0.091 | 0.051 |
Произведем преобразования заданной обобщенной структурной схемы автоматизированной электромеханической системы (ЭМС). Схемотехническое исполнение ЭМС включает большой перечень устройств и блоков: электрические двигатели, трансформаторы и управляющие устройства промышленной электроники, элементы логики, датчики, микропроцессорные устройства, измерительные приборы и т.д.
Структура рассматриваемой системы является линейной и представляет класс систем трехконтурного подчиненного регулирования. Первый (внутренний) контур охвачен отрицательной обратной связью по моменту ОСМ, второй – отрицательной обратной связью по скорости ООС, третий – отрицательной обратной связью по положению ОСП.
Каждый контур имеет свой регулятор: РМ (момента), РС (скорости), РП (положения). Работают эти контуры в строгой подчиненности от внутреннего к внешнему. Когда один из них выполняет свои функции, другие ему не мешают, ожидая своей очереди. В каждом контуре можно обеспечить необходимые режимы статики и динамики.
Итак, произведем пошаговое упрощение исходной обобщенной структурной схемы автоматизированной электромеханической системы с учетом всех необходимых норм и правил, а также специфики параметров и данных, содержащихся в индивидуальном варианте курсовой паботы:
·
Тогда структурная схема электромеханической системы будет выглядеть следующим образом: Рис. 1
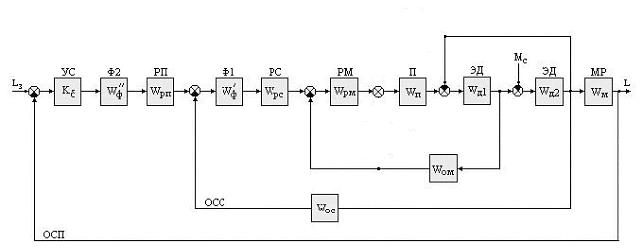
Рис.1
Следует учитывать, что типы регуляторов РС, РМ, РП, а следовательно, их передаточные функции остаются неизвестными до результатов синтеза. Поэтому на этапе анализа передаточные функции фильтров Ф1, Ф2 и регуляторов РС, РМ, РП можно принять равными единице. Вследствие этого структурная схема примет вид:

Рис.2. Исходная обобщенная структурная схема автоматизированной электромеханической системы с учетом заданного варианта и значений функций неопределенных регуляторов
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 634; Нарушение авторских прав?; Мы поможем в написании вашей работы!