КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Введение. Целью курсовой работы является изучение и самостоятельное применение основных положений классической теории автоматического управления в решении задачи
|
|
|
|
Целью курсовой работы является изучение и самостоятельное применение основных положений классической теории автоматического управления в решении задачи электропривода – анализе системы автоматизированного электропривода постоянного тока и синтезе последовательного корректирующего устройства. Настоящая работа рассматривает задачи анализа и синтеза линейных непрерывных систем, а также отдельные приложения теории линейных импульсных (цифровых) систем управления. В качестве основного метода исследования используется метод логарифмических частотных характеристик (ЛАЧХ), который отличается простотой, наглядностью и приводит к легко обозримым результатам. Это позволяет применить его наряду с методами, основанными на использовании вычислительной техники, которые также используются в ходе выполнения работы.
Задача проектирования последовательного корректирующего устройства САУ состоит в том, чтобы на основании некоторых сведений об объекте управления и заданным техническим требованиям к системе в целом, рассчитать регулятор скорости, проверить его реакцию на различные возмущающие воздействия и помехи, выбрать соответствующую элементную базу, сконструировать регулятор, провести необходимые испытания и качественную наладку системы в целом, чтобы обеспечить хорошее качество регулирования.
1. Синтез последовательного корректирующего устройства – регулятора скорости (РС)
1.1. Определение передаточной функции неизменяемой части:
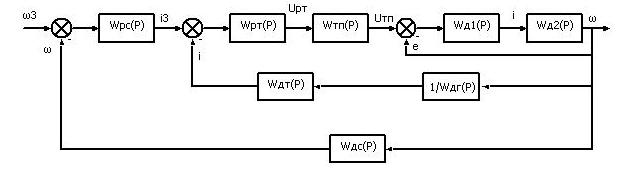
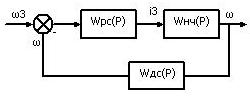
Рис. 3. Преобразование структурной схемы системы автоматического регулирования
W рс(р) – передаточная функция регулятора скорости; W нч(р) – передаточная функция неизменяемой части, включающая звенья, входящие в замкнутый контур тока, т.е. W рт(р), W тп(р), W д1(р), W дт(р), и звено объекта управления W д2(р).
Определяем передаточную функцию неизменяемой части W нч(р):



После алгебраических преобразований получим:

Подставим заданные значения в передаточную функцию неизменяемой части W нч(р):


Определим полюсы передаточной функции неизменяемой части W нч(р), предварительно выделив изодромное звено. Получим:

Затем, решая кубическое уравнение  = 0 получим следующие корни:
= 0 получим следующие корни:
р1 =-54,279; р2 = -43,696+ i 56,64198; р3 = -43,696- i 56,64198
Далее разобьем передаточную функцию на отдельные звенья:


В итоге передаточная функция неизменяемой части W нч(р) выглядит следующим образом

1.2. Построение частотных характеристик объекта регулирования (неизменяемой части системы):
Передаточная функция неизменяемой части представлена в виде произведения передаточных функций трех типовых звеньев: изодромного, апериодического и колебательного. Построив ЛАЧХ каждого звена и просуммировав их, получим ЛАЧХ неизменяемой части.
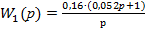 – изодромное звено, где: k1=0,16; T1=0,052 с; ω1=19,23рад/с;
– изодромное звено, где: k1=0,16; T1=0,052 с; ω1=19,23рад/с;
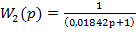 –апериодическое звено, где: k2=1; T2=0,01842 с; ω2=54,29рад/с;
–апериодическое звено, где: k2=1; T2=0,01842 с; ω2=54,29рад/с;
W3(p)=  – колебательное звено, где: k3=9,11; T3=0,01398 с; ω2=71,53рад/с; ξ=0,6117;
– колебательное звено, где: k3=9,11; T3=0,01398 с; ω2=71,53рад/с; ξ=0,6117;
Построения частотных характеристик выполняются в диапазоне от 1 до 1000 с-1. Для построения характеристик были выбраны рекомендуемые масштабы: по частоте – 1 декада на 100 мм; по усилению – 10 дБ на 10 мм; по фазе - 90° на 30 мм.
Для построения фазовых частотных характеристик выбираем частоты w в диапазоне [1с-1 ¸1000 с-1] , а также приведем формулы, по которым строятся ЛФЧХ для данных звеньев:
 - ЛФЧХ изодромного звена;
- ЛФЧХ изодромного звена;
 - ЛФЧХ апериодического звена;
- ЛФЧХ апериодического звена;
 - ЛФЧХ колебательного звена для частот ω<1/T;
- ЛФЧХ колебательного звена для частот ω<1/T;
 - ЛФЧХ колебательного звена для частот ω>1/T;
- ЛФЧХ колебательного звена для частот ω>1/T;
 – ЛФЧХ неизменяемой части для частот ω<1/T;
– ЛФЧХ неизменяемой части для частот ω<1/T;
 – ЛФЧХ неизменяемой части для частот ω>1/T;
– ЛФЧХ неизменяемой части для частот ω>1/T;
 - ЛФЧХ регулятора скорости;
- ЛФЧХ регулятора скорости;
 – ЛФЧХ неизменяемой части при ω<1/T;
– ЛФЧХ неизменяемой части при ω<1/T;
 – ЛФЧХ неизменяемой части при ω>1/T;
– ЛФЧХ неизменяемой части при ω>1/T;
 . – Рассчет ЛФЧХ
. – Рассчет ЛФЧХ

| 
| 
| 
| 
| 
| 
| |
| -88,6252 | -1,05527 | -0,97985 | -90,6603 | -84,2894 | -174,95 | ||
| -83,1572 | -5,2621 | -4,91078 | -93,3301 | -63,4349 | -156,765 | ||
| -76,5043 | -10,4369 | -9,89337 | -96,8345 | -45 | -141,835 | ||
| 15,7 | -69,3536 | -16,1296 | -15,7515 | -101,235 | -32,4948 | -133,729 | |
| -46,1691 | -36,3828 | -44,8623 | -127,414 | -14,0362 | -141,45 | ||
| -34,7778 | -47,8608 | -73,8858 | -156,524 | -9,46232 | -165,987 | ||
| -27,512 | -55,8388 | 79,61039 | -3,7404 | -7,12502 | -10,8654 | ||
| -22,6199 | -61,503 | 60,83276 | -23,2901 | -5,71059 | -29,0007 | ||
| -9,46232 | -77,7481 | 20,8661 | -66,3444 | -2,29061 | -68,635 | ||
| -8,77274 | -78,6311 | 19,21425 | -68,1896 | -2,1211 | -70,3107 | ||
| -4,76364 | -83,8032 | 10,12879 | -78,4381 | -1,14576 | -79,5838 | ||
| -3,17983 | -85,8599 | 6,714553 | -82,3251 | -0,7639 | -83,089 | ||
| -2,38594 | -86,8925 | 5,025929 | -84,2525 | -0,57294 | -84,8255 |
ЛАЧХ и ЛФЧХ объекта регулирования представлены на рис.4
1.3. Построение желаемой частотной характеристики разомкнутой системы и синтез корректирующего устройства:
Частота среза желаемой ЛАЧХ разомкнутой системы определяется по формуле:
Граница первой низкочастотной области вычисляется по заданным показателям качества и имеет вид:

Низкочастотная часть желаемой ЛАЧХ обуславливает точность воспроизведения управляющего воздействия. Форма характеристики в этом диапазоне ω ϵ (0; ω1н=10с-1) зависит от требуемого порядка астатизма.
ЛАЧХ последовательного корректирующего устройства находится как разность желаемой ЛАЧХ Wж(р) и ЛАЧХ неизменной части Wнч(р), затем определяется передаточная функция регулятора WPC(p). Желаемая ЛАЧХ и ЛФЧХ разомкнутой системы представлены на рис. 4.
Передаточная функция регулятора скорости имеет вид:
 ,
,
где 

Передаточная функция желаемой ЛАЧХ имеет вид:

1.4. Анализ качества по реакции системы на ступенчатое управляющее воздействие:
С помощью программы Matlab (в частности, Simulink) оцениваю показатели качества полученой системы при ωз(t)=1(t) и ic(t)=0:
Рис.5. Структурная схема САР
1) перерегулирование ϭ= (30-50)%,
2)время достижения максимума tm= c ϵ (0,15-0,2)c,
3)время переходного процесса tп= c ϵ (0,3-0,4)c.
Спроектированная система обеспечивает заданные показатели качества переходного процесса, изображенного на рис. 6.
Рис.6. Реакция системы регулирования скорости ω(t) при ωз(t)=1 и iс(t)=0, N(t)=0.
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 547; Нарушение авторских прав?; Мы поможем в написании вашей работы!