КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принципы регулирования
|
|
|
|
Объект управления и элементы регулятора, образующие в совокупности САР, могут быть объединены двумя разными способами и реализовать в зависимости от этого два различных принципа регулирования. Один из них получил название принцип регулирования по отклонению параметра (принцип Ползунова - Уатта), второй - принцип регулирования по возмущающему воздействию (принцип Понселе). Рассмотрим каждый из них пользуясь соответствующими структурными схемами, которые в графической форме отображают последовательность прохождения потока информационных сигналов, их преобразований при функционировании системы.
На рис.1.2. приведена структурная схема системы регулирования "по отклонению параметра" или, как короче называют — "по отклонению". Величина параметра объекта управления Р воспринимается датчиком и преобразуется в другую физическую величину — сигнал - [Р]. В элементе сравнения этот сигнал вычитается из сигнала задатчика цели (З.Ц.) управления. Сигнал задатчика несет информацию о желаемом значении параметра, а сам задатчик является своего рода запоминающим устройством, хранящем в виде сигнала [Р3] информацию о конечной цели регулирования. Сигнал разницы (отклонения) ∆ после усиления преобразуется исполнительным устройством в пропорциональное по величине и знаку изменение управляющего воздействия ∆Ху. Изменение управляющего воздействия на ОУ приводит к изменению его параметра. Измененное значение параметра Р преобразуется датчиком в новое значение сигнала [Р] и т.д. Процесс изменения параметра происходит до тех пор, пока сигнал Д не достигнет нулевого значения. Достижение этого состояния произойдет обязательно, т.к. при ненулевых значениях ∆, величина и знак управляющего воздействия будут направлены на достижение этой цели. В результате, фактическое значение параметра Р станет равным заданному (желаемому) Р3. Если, к примеру Р>Р3, то ∆<0, ∆Ху<0, управляющее воздействие уменьшается, следовательно уменьшается величина Р, приближаясь к Р3; если Р<Р3, то ∆>0, ∆Ху>0, величина Р увеличивается приближаясь к Р3. Таким образом, в любом случае, управляющее воздействие имеет такой знак, при котором величина параметра будет приближаться к заданному значению. Величина управляющего воздействия будет влиять на скорость приближения параметра к конечной цели, а значит и на быстроту достижения регулятором этой цели.

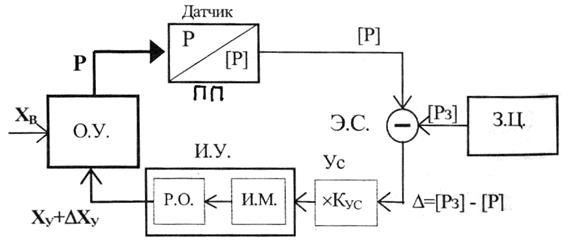
Рис. 1.2. Структурная схема системы автоматического регулирования "по отклонению параметра":
О.У. - объект управления;
И.У. - исполнительное устройство;
P.O. - регулирующий орган;
И.М. - исполнительный механизм;
З.Ц. - задатчик цели (заданного значения параметра);
Ус - усилитель;
Э.С. - элемент сравнения
Кольцевая структура, которую образуют объект управления элементы регулятора (датчик, элемент сравнения, исполнительны механизм и регулирующий орган) получила название контур регулирования. В реальных системах регулирования, даже для одно объекта, контуров регулирования может быть много, например, если речь идет об управлении несколькими параметрами ОУ.
Представленная схема является иллюстрацией так называемой обратной связи,которую создают в системе элементы регулятора, и которая заключается в том, что параметр объекта управления Р, пройдя все преобразования в элементах регулятора, превращается в управляющее воздействие X у на самого себя.
Идея обратной связи напоминает собой идею вечного двигателя, только в данном случае речь идет об "информационном вечном двигателе", которым и является система автоматического регулирования. Механизм обратной связи широко используется также и в самих элементах регулятора, это позволяет получить требуемые характеристики преобразования информации элемента и повысить их стабильность.
На рис.1.3. в качестве примера системы автоматического регулирования "по отклонению", приведен вариант системы (точнее - подсистемы) регулирования режимом работы бульдозера.
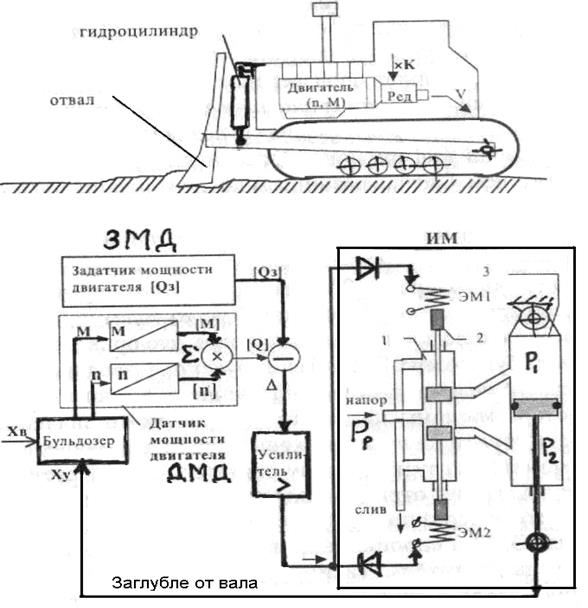
Рис. 1.3. САР нагрузки двигателя бульдозера:
1 - золотниковый гидропереключатель; 2 - плунжеры соленоидов;
3 - силовой гидроцилиндр; ЭМ1, ЭМ2 - катушки соленоидов
Объектом управления является бульдозер. Параметром управления выбрана величина мощности Q развиваемая двигателем машины. Целью управления является поддержание заданного постоянного значения мощности Q3. Смыслом такой постановки задачи управления является обеспечение максимальной производительности машины (т.к. мощность мотора идет на выполнение работы по срезанию и перемещению грунта), при отсутствии недогрузки или перегрузки двигателя.
Управляющим воздействием взята величина заглубления отвала в грунт. Обеспечению постоянной загрузки двигателя препятствует непостоянная величина жесткости грунта, что и является в данной ситуации основным возмущающим воздействием.
Фактическая мощность двигателя Q оценивается не непосредственно, а как результат произведения измеренных соответствующими датчиками скорости вращения вала n и момента М на валу мотора. Результатом произведения сигналов [n] и [М] является сигнал [Q], несущий информацию о фактической мощности развиваемой двигателем. Сигнал разницы ∆ после усиления управляет через соленоиды ЭМ1 и ЭМ2 положением золотника. Если сигнал ∆>0, что будет иметь место при Q<Q3т.е. при недогрузке двигателя, положительный сигнал усилителя через верхний диод поступит на катушку соленоида ЭМ1, который втянет плунжер, в результате напор жидкости в гидросистеме через золотник будет поступать в верхнюю половину гидроцилиндра, что приведет к заглублению отвала бульдозера. Заглубление будет производится до тех пор, пока сигнал ∆ не примет нулевое значение, т. е., пока мощность на валу мотора машины не достигнет желаемого значения. Если жесткость грунта на пути движения машина увеличится, то возрастет момент нагрузки на валу двигателя и возрастет величина Q, сигнал ∆ примет отрицательное значение, отрицательный сигнал усилителя через нижний по схеме диод поступит на катушку соленоида ЭМ2. Гидроцилиндр начнет поднимать отвал, снижая нагрузку на двигатель. Таким образом, изменяя величину заглубления отвала в грунт, регулятор обеспечивает постоянную загрузку двигателя.
Регулирующим органом, непосредственно оказывающим управляющее воздействие, можно считать отвал бульдозера, в роли исполнительного механизма, приводящего регулирующий орган в движение, можно рассматривать гидросистему с соленоидным приводом золотникового гидропереключателя.
Влияние усилителя сигнала ∆ проявляется в быстроте и точности, с которой система восстанавливает заданное значение мощности Q при её отклонении от заданного значения из-за возмущений. Увеличение коэффициента усиления усилителя в Kvc раз, приведет в Кус раз большему значению величины сигнала поступающего на катушки соленоидов золотникового гидропереключателя, и, как следствие, - к пропорционально большему потоку жидкости в гидроцилиндр и большей скорости перемещения отвала.
Но, оказывается, беспредельно увеличивать коэффициент усиления нельзя. По мере роста Кус происходит улучшение точности поддержания заданного значения параметра - Q, но затем происходит обратное, - значительно увеличивается время восстановления заданного значения параметра при действии возмущений. Причем, из-за инерционности системы гидравлики, отвала, датчиков измерения мощности двигателя, характер приближения мощности к Q3 имеет вид затухающих колебаний около Q3: - отвал то слишком заглубляется в грунт, то излишне поднимается. При дальнейшем увеличении Кус, колебания становятся незатухающими и с нарастающей амплитудой. Такое явление называется потерей устойчивости системы регулирования. При большом размахе колебаний параметров объекта управления, возникающие в нем нагрузки могут превысить допустимые пределы и даже довести объект управления до физического разрушения.
Справляясь с задачей стабилизации мощности мотора, работа системы регулирования приведет к тому, что участки поверхности с более мягким грунтом будут выбираться глубже, чем более жесткие, что во многих случаях выполнения земляных работ потребует впоследствии проведения дополнительной планировки поверхности с неизбежными затратами времени и средств.
Подобные ситуации, а они встречаются не редко в практике автоматизации, могут дискредитировать саму идею автоматизации. Пользуясь рассмотренным примером можно полагать, что такая ситуация возникла не потому, что "техника ещё не может заменить человека", а потому, что человек создававший автоматизированный бульдозер не уделил должного внимания формализации задачи управления, т.е либо не заметил, либо забыл учесть какие-либо возможные нюансы в технологии использования машины.
Рассмотренный выше пример автоматизации бульдозера можно легко видоизменить таким образом, чтобы и двигатель был стабильно загружен и планируемая поверхность не имела "рельефа жесткости". Для этого можно выбрать в качестве управляющего воздействия не величину заглубления отвала, а, к примеру, - передаточный коэффициент редуктора двигатель - трансмиссия Кр. В этом случае поведение машины будет иным: на мягком грунте, чтобы не снизить загрузку двигателя, регулятор увеличит передаточное отношение редуктора, что приведет к возрастанию скорости движения машины; на жестком наоборот, - скорость снизится. Но и такое решение задачи автоматизации бульдозера имеет свои скрытые "проколы". Например, при работе машины на скользком грунте (мокрая глина) сила сопротивления движению отвала, при заданном его заглублении, может превысить силу сцепления колес (гусениц) с грунтом. В итоге, нагрузка на двигатель будет малой, т.к. ему "легко" вращать скользящие гусеницы, а система регулирования будет наращивать скорость их вращения, машина же будет оставаться неподвижной. Чтобы устранить и этот недостаток необходимо предусмотреть возможность измерения и учета машиной степени скольжения. Это означает, что кроме "старого параметра" - мощности мотора необходимо дополнительно в систему ввести новые. Не углубляя рассмотрение вопроса автоматизации бульдозера, отметим следующие общие моменты:
- без знания технологического процесса, его особенностей невозможно рационально спроектировать систему регулирования;
-главным при создании систем управления является не "выдумывание" и рисование всевозможных схем и "изобретение" различных элементов и узлов. Главным является формализация задачи управления, лаконичная (без ненужных подробностей) и, в то же время, охватывающая все реально возможные ситуации в поведении технологического процесса. Под формализацией задачи подразумевается, в первую очередь, выбор перечня необходимых параметров процесса (мощность двигателя, степень скольжения гусениц и др.) и управляющих воздействий (заглубление отвала, коэффициент передачи редуктора и др.), и указание желаемых значений выбранных параметров;
- анализ поведения системы, на основе лишь только структурной схемы, уже позволяет легко обнаружить серьезные, принципиальные промахи в решении задачи (неверный выбор параметров, управляющих воздействий, неверный выбор конечных [желаемых] значений параметров), или наоборот: - убедиться в правильности выбранных решений. В настоящее время для такого анализа широко применяются компьютеры, позволяющие смоделировать процесс управления не только для отдельных частных ситуаций, но и наглядно продемонстрировать разработчику будущей системы её поведение в динамике, при всевозможных изменениях технологических факторов.
Рассмотрим принцип регулирования "по возмущающему воздействию" ("по возмущению"). Структурная схема системы автоматического регулирования работающего на основе этого принципа представлена на рис.1.4.
В отличие от рассмотренной выше САР "по отклонению", в системе автоматического регулирования "по возмущению" величина параметра Р непосредственно не измеряется и не учитывается. Измеряется причина её изменения - возмущающие воздействия Хв . Преобразованный датчиком сигнал [Хв], несущий информацию о величине возмущающих воздействий вычитается из сигнала задатчика [Хэ]. Разница [Ху], рассматривается в системе, как сигнал несущий информацию о необходимом управляющем воздействии Ху. Предположим, что в системе отсутствуют возмущающие воздействия (Хв=0). В этом случае будет иметь место Ху=Хэ, т.е. на объект управления воздействует лишь управляющее воздействие, равное эталонному.
Если появится положительное (по знаку) возмущающее воздействие, то величина управляющего будет уменьшена на Хв. Если возмущение будет отрицательным, то управляющее воздействие на столько же увеличится. Из приведенной схемы следует, что объект управления испытывает оба воздействия Ху и Хв, при этом:
ХУ + ХВ = (ХЭ - ХВ) + ХВ = ХЭ;
Это значит, что независимо от того, есть возмущения или их нет, объект управления всегда испытывает постоянное воздействие равное эталонному, а значит его параметр сохраняется неизменным, заданным.
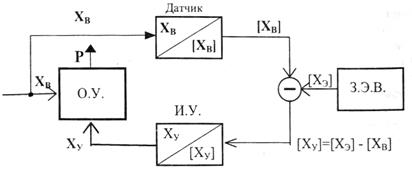
Рис. 1.4. Структурная схема САР "по возмущению":
О.У. - объект управления;
И.У. - исполнительное устройство;
З.Э.В. - задатчик эталонного воздействия (при котором обеспечивается заданное состояние ОУ)
Главным достоинством регулирования "по возмущению" явля ется его упреждающий характер, - величина параметра ОУ еще н успела изменится из-за возмущающих факторов, а величина управляющего воздействия регулятора уже скорректирована, причем сразу на необходимую величину. Это значит, что регулятор "по возмущению" может обеспечивать абсолютно точное значение параметра объекта, без малейших её колебаний. Но это возможно только в том случае, если регулятор учитывает все возмущающие воздействия, что на практике выполнить затруднительно. Если обратиться к рассмотренному выше примеру автоматизации бульдозера, то при создании системы регулирования на основе принципа "по возмущению" пришлось бы измерять жесткость грунта, рельеф поверхности, наклон машины, степень износа трансмиссии и отвала, количество налипшей на гусеницы и другие элементы машины глины и др. Т.о., задача значительно усложняется технически, - чем с большей точностью необходимо управлять, тем большое количество датчиков необходимо устанавливать, вплоть до измерения веса бульдозериста.
Поэтому регулирование "по возмущению" крайне редко используется самостоятельно (лишь в том случае, когда возмущающих воздействий мало и их легко измерить), чаще такое регулирование используется как дополнительное, вспомогательное в регуляторах "по отклонению". В этом случае измеряются лишь некоторые, наиболее влияющие на состояние ОУ возмущения. Такое комбинированное управление позволяет улучшить реакцию регулятора в динамике, - он не будет ожидать изменения параметра, а сразу отреагирует на возмущающий фактор. Например, в некоторых системах кондиционирования воздуха, обеспечивающих заданную величину температуры в помещении и функционирующих на основе принципа регулирования "по отклонению", дополнительно устанавливаются т.н. солнечные датчики, дающих сигнал о наличии - отсутствии прямых солнечных лучей. При наличии солнца в помещении, система снижает на 2-3° установленное значение температуры, за счет чего повышается комфортность, хотя и без такого датчика система будет оставаться работоспособной.
Примером САР на основе принципа регулирования "по возмущению" служит схема введения присадочного порошка (рис.1.5.).Система включает в себя, как составные элементы, два регулятора реализующих принцип регулирования "по отклонению": - регулятор - стабилизатор загрузки бункера весового дозатора, регулятор - стабилизатор загрузки бункера весового дозатора жидкости.
Загрузка в бункер весового дозатора производится ленточным транспортёром из накопительного расходного бункера. В процессе загрузки датчиком веса измеряется вес бункера Рп, сигнал датчика [Рп] вычитается из сигнала задатчика веса [Р3п]. Положительное значение сигнала разницы S является командой для блока управления приводом на включение двигателя транспортера; отрицательное и нулевое - на отключение. Т.о., загрузка ВДП будет происходить до тех пор, пока в бункере не будет заданное значение веса порошка. Аналогичным образом работает регулятор загрузки дозатора жидкости. Подача в бункер ВД будет происходить до тех пор, пока сигнал датчика веса [Pв] и задающий сигнал [Ркв] не сравняются. Необходимо заметить, что сигнал [Ркв] не является постоянным, его величина зависит от количества порошка в жидкой фазе. Чем меньше концентрация порошка, тем меньше жидкости заливается в дозатор ВДЖ. Непостоянное количество порошка является возмущающим воздействием, параметром регулирования - концентрация, управляющим воздействием, компенсирующим возмущение - коррекция дозировки через ВДЖ. Определение количества жидкости производится следующим образом: датчик концентрации, установленный в бункере ВДП вырабатывает сигнал [W] несущий информацию о фактической концентрации, затем производится перемножение сигнала, результат - сигнал [Ркв] несет информацию о количественном соотношении фаз.
В элементе вычитания А происходит формирование скорректированного сигнала дозировки [Ркв], который и является задающим для САР управляющей дозировкой жидкости в ВДЖ.
Такая система регулирования подачи жидкости в ВДЖ реализует принцип регулирования "по отклонению" является лишь элементом (исполнительным устройством) в САР.
Это значит, что системы регулирования могут находиться в подчинении одна у другой, т.е. образовывать иерархические структуры САР. При рассмотрении технической стороны, то одним из сложных вопросов при реализации такой системы является оперативное измерение концентрациис необходимой точностью. Чаще всего, в качестве датчика концентрации используется емкостный тип датчика. Применительно к рассматриваемому случаю его типовая конструкция приведена на рис. 1.6.
Корпус бункера ВДП и измерительный зонд, точнее его открытая часть, совместно образуют электрический конденсатор, межэлектродным материалом которого является порошок. Одна часть зонда располагается в нижней, конической части бункера, где плотность порошка максимальна и стабильна. Верхняя же часть зонда покрыта толстым слоем изоляционного материала, за счет чего верхний рыхлый слой "отодвинут" от электрода зонда и "не участвует" в оценке концентрации. Емкость конденсатора С зависит от размеров конструкции, но, главное, - от величины относительной диэлектрической проницаемости материала ε между электродами. Для большинства сухих сыпучих материалов ε находится в диапазоне от 4 до 8 единиц (ε величина безразмерная). Для жидкости величина ε=81 из чего следует, что даже небольшое количество её в материале резко увеличивает значение его относительной диэлектрической проницаемости.

Рис. 1.5. Система стабилизации:
ВДП - весовой дозатор порошка; ВДЖ- весовой дозатор жидкости;
БУП - блок управления приводом транспортера загрузки;
ИМ - исполнительный механизм привода запорного клапана;
РБП - расходный бункер подачи порошка;
1-датчик концентрации
2,3 - датчики веса;
4 - задатчик весовой порции по рецептуре;
5- запорный клапан;
6 - задатчик весовой порции;
7 - двигатель привода транспортера
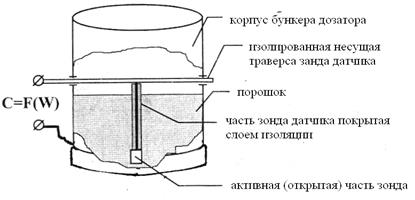
Рис. 1.6. Конструкция емкостного датчика концентрации
Измеряя емкость датчика, можно с достаточной точностью (погрешность составляет 1+1,5%) судить о концентрации.
Подобные системы стабилизации величины концентрации применяются на современных смесительных узлах с высоким уровнем автоматизации. В настоящее время, такого рода системы управления строятся исключительно на основе программно управляемых контроллеров (см. лаб. работу №2), объединенных локальной компьютерной сетью, при этом, как правило, решается весь комплекс задач связанных с автоматизацией, в том числе и стабилизация соотношения.
Рассмотренные структурные схемы не следует понимать буквально, как чертеж, как схему конструкции регулятора. Любая структурная схема является графической формой представления алгоритма управления, который может быть реализован как аппаратно, так и программно. На структурных схемах показаны лишь основные, принципиально необходимые действия (преобразования) для достижения поставленной цели управления.
На основе структурной схемы при проектировании САР, строится функциональная схема, в которой подробно, например в виде уравнений, представляются функции составляющих её элементов, что позволяет произвести расчет "качества" процесса регулирования: -точность, быстродействие, степень устойчивости и др. Но это не значит, что структурная схема является лишь необязательным иллюстративным материалом. Она позволяет произвести, как в рассмотренном выше примере с бульдозером, предварительный анализ поведения разрабатываемой системы.
|
|
|
|
|
Дата добавления: 2017-02-01; Просмотров: 83; Нарушение авторских прав?; Мы поможем в написании вашей работы!