КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Кинематика поворота автомобиля с жесткими колесами
|
|
|
|
Управляемость АТС
При рассмотрении тягово-скоростных и тормозных свойств АТС принималось условие его прямолинейного движения. В действительности траектория движения всегда криволинейная с непрерывно изменяющейся кривизной. Криволинейность движения обусловлена необходимостью совершать повороты в соответствии с задаваемой водителем траекторией, а также неизбежным отклонением АТС от нее вследствие действия внешних возмущающих сил. При движении на прямолинейных участках пределы изменения радиуса кривизны траектории невелики, поэтому такое движение рассматривается условно как прямолинейное. Это позволяет рассматривать эксплуатационные свойства отдельно при прямолинейном и отдельно при криволинейном движениях.
Управляемость – это свойство АТС сохранять в определенной дорожной обстановке заданное направление движения или изменять его в соответствии с воздействием водителя на рулевое управление.
Для оценки управляемости предложено много оценочных показателей, в частности, установленных ГОСТ Р 52302-2004. Стандарт дает подробное определение каждого параметра и методы испытаний АТС.
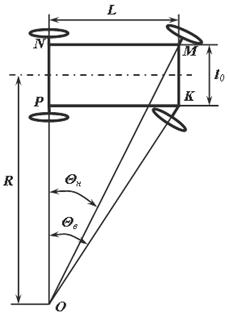 Соотношение между углами поворота наружного θн и внутреннего θв управляемых колес, при котором обеспечивается их качение без скольжения, определяется из треугольников ONM и OPK:
Соотношение между углами поворота наружного θн и внутреннего θв управляемых колес, при котором обеспечивается их качение без скольжения, определяется из треугольников ONM и OPK:
ctg θ н - ctg θ в = lo/L,
где lo – расстояние между осями поворотных цапф.
При этом под радиусом понимают расстояние от мгновенного центра поворота (точка О) до продольной оси автомобиля. Из геометрических соотношений:
R = L / tg θ,
где θ = (θ н + θ в) / 2 – средний угол поворота управляемых колес.
Однако в действительности автомобильная шина обладает боковой эластичностью, и при повороте возникающие боковые силы вызывают ее поперечную деформацию. Колесо катится с уводом.
 4.5.2. Боковой увод колеса
4.5.2. Боковой увод колеса
Боковой увод – это отклонение вектора скорости эластичного колеса от плоскости вращения при действии боковой силы. Если на колесо действует боковая сила Ру, то вектор скорости Vк, равный геометрической сумме скоростей Vx и Vy, отклоняется от плоскости вращения на некоторый угол δ, который называется углом бокового увода.
Сущность этого явления заключается в том, что при приложении к колесу силы Pу его обод сместится в направлении действия силы относительно центра площади контакта колеса с дорогой, деформируя элементы шины. Эта деформация по длине площади контакта разнообразная: впереди меньше, сзади больше. Вследствие этого продольная ось площади оказывается повернутой относительно плоскости вращения колеса на угол δ.
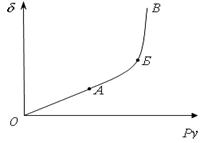 Результаты исследований показали, что угол увода колеса для определенного состояния шины является функцией боковой силы.
Результаты исследований показали, что угол увода колеса для определенного состояния шины является функцией боковой силы.
На графике этой зависимости можно отметить три характерных участка:
0А – угол увода линейно зависит от боковой силы;
АБ – переходной, где элементы шины начинают проскальзывать относительно дороги;
БВ – полное скольжение шины в боковом направлении.
Для линейного участка (0А) зависимости можно записать:
Ру = kδ δ,
где kd – коэффициент сопротивления уводу, Н/рад (Н/град).
Физический смысл коэффициента сопротивления уводу – это боковая сила в Ньютонах, вызывающая увод колеса на 1 радиан (1 градус).
Коэффициент сопротивления уводу зависит от нормальной нагрузки на колесо, от продольной реакции, от типа и состояния дорожного покрытия, от конструкции подвески, от давления воздуха в шине и ее конструктивных параметров.
4.5.3. Кинематика поворота автомобиля с эластичными колесами
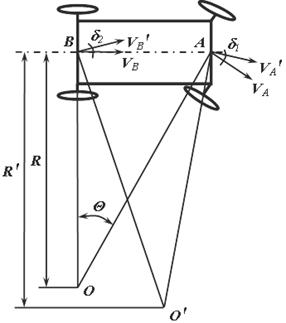 Боковой увод мостов на повороте приводит к тому, что векторы мгновенных скоростей VA и VB центров мостов отклоняются на углы увода передних колес δ1 и задних δ2; мгновенный центр поворота перемещается из точки О в точку O', а радиус поворота становится равным R'.
Боковой увод мостов на повороте приводит к тому, что векторы мгновенных скоростей VA и VB центров мостов отклоняются на углы увода передних колес δ1 и задних δ2; мгновенный центр поворота перемещается из точки О в точку O', а радиус поворота становится равным R'.
Из геометрических соотношений следует, что
R' = L / [tg(θ - δ1) + tg δ2].
При высоких скоростях движения и углы увода, и углы поворота управляемых колес невелики (не превышают 10°).
Для этих условий можно считать tg θ ≈ θ;tg (θ - δ1) ≈ θ - δ1; tg δ2 ≈ δ2 и записать:
R = L / θ,
R' = L / (θ - δ1 + δ2).
В зависимости от соотношения углов увода переднего и заднего мостов радиус поворота R' может быть либо равным радиусу поворота R автомобиля с жесткими колесами, либо меньше или больше его, в зависимости от чего различают три вида поворачиваемости.
Смещение центра поворота всегда происходит внутрь базы автомобиля.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 3729; Нарушение авторских прав?; Мы поможем в написании вашей работы!