КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Конструкції стрілових систем і їхній порівняльний аналіз
|
|
|
|
На портальних кранах, як правило, застосовуються урівноважені стрілові системи, що повинні відповідати двом головним вимогам:
1 Системи повинні бути урівноважені за допомогою рухливої противаги, що дозволяє знизити потужність двигуна механізму зміни вильоту;
2 Система повинна забезпечити горизонтальну чи досить положисту траєкторію вантажу при хитанні стріли, що дає дві переваги:
а) забезпечує експлуатаційні зручності при роботі крана;
б) знижує потужність двигуна механізму зміни вильоту
На практиці найбільше поширення одержали чотири стрілові системи
1 Пряма стріла зі зрівняльним поліспастом;
2 Пряма стріла зі зрівняльним блоком;
3 Шарнирно-сочлененная стрілова система з непрофільованим хоботом і гнучким відтягненням;
4 Шарнирно-сочлененная стрілова система з непрофільованим хоботом і твердим відтягненням
Стрілові системи зі зрівняльним поліспастом
 1 – противага на продовженні стріли ідеальне що врівноважує, тому що його центр ваги З1, центр ваги стріли З2 і вісь хитання стріли Про лежать на одній прямій;
1 – противага на продовженні стріли ідеальне що врівноважує, тому що його центр ваги З1, центр ваги стріли З2 і вісь хитання стріли Про лежать на одній прямій;
2 – кривошипно-шатунний механізм зміни вильоту;
3 – зрівняльний поліспаст
4 – механізм підйому
Малюнок – Схема стрілової системи зі зрівняльним поліспастом
l2–l1=(AB–AB’)m
 Горизонтальність переміщення вантажу внаслідок перекочування каната по блоках.
Горизонтальність переміщення вантажу внаслідок перекочування каната по блоках.
При зміні вильоту, коли механізм не працює, довжини вантажного а і зрівняльного b поліспастів змінюються в протилежних напрямках, що дозволяє забезпечити траєкторію вантажу близької до горизонтальної прямої
Стрілова система зі зрівняльним блоком

1 – гідравлічний механізм зміни вильоту;
2 – хитне коромисло;
3 – рухлива противага;
4 – зрівняльний блок;
5 – барабан механізму підйому
Малюнок – Схема прямої стріли зі зрівняльним блоком
l2–l1=(AB+ВР’)–(АВ’–B’C’)
Чи положистість горизонтальність траєкторії досягається також унаслідок перекочування каната по блоці.
У порівнянні зі стрілою зі зрівняльним поліспастом стріла зі зрівняльним блоком має більш складну конструкцію підоймової системи, але менше число блоків, загальну довжину і знос вантажних канатів
Стрілові системи з непрофільованим хоботом і гнучким відтягненням
Положистість траєкторії досягається за рахунок кінематики стрілової системи, тобто хобот переміщається по злегка похилій траєкторії і внаслідок невеликого перекочування канатів
Малюнок – Схема стрілової системи з непрофільованим хоботом і гнучким відтягненням
Стрілові системи з непрофільованим хоботом і твердим
відтягненням
1,2 – эквидистантные траєкторії кінця хобота і вантажу;
3 – тверде відтягнення;
4 – гвинтовий механізм зміни вильоту
Малюнок – Схема стрілової системи з непрофільованим хоботом і твердим відтягненням
Оскільки вантажний канат запасован по периметрі стрілової системи, то траєкторії хобота і вантажу будуть эквидистантны, а вантажний канат не буде перекочуватися по блоках
Порівняльний аналіз систем
1) системи 1 і 2 легше по масі, чим 3 і 4;
2) довжина вільної підвіски в систем 1 і 2 більше, ніж у 3 і 4, що викликає більше розгойдування вантажу на канатах і ускладнює керування краном;
3) стріли систем 1 і 2 майже розвантажені від крутіння, що також дозволяє знизити їхню масу. Габарити вантажу, що піднімається, можуть бути досить великі при стрілах невеликої довжини в систем 3 і 4. Щоб підняти такий же вантаж, стріли систем 1 і 2 повинні бути виконані великої довжини;
4) стрілові системи застосовуються при наступних грузоподъемностях: 1 і 2 при Q=5...10…10т; 3 – при Q=10...16…16т; 4 – при Q=16…160т
Визначення маси рухливої противаги
Противага призначена для зрівноважування елементів стрілової системи (стріли хобота, відтягнення), але не вантажу. Зрівноважування маси вантажу виробляється самою кінематикою стрілової системи. Розрахунок будемо вести на прикладі шарнірно зчленованої стрілової системи з непрофільованим хоботом
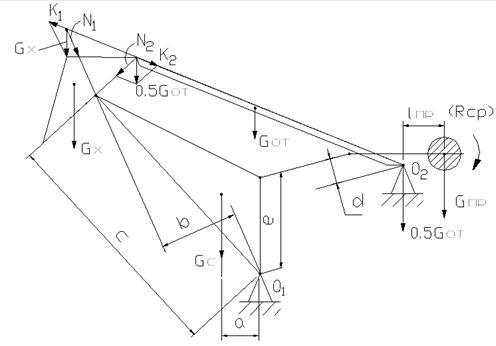
Малюнок – Розрахункова схема шарнірно зчленованої стріли з твердим відтягненням
Знайдемо моменти від ваги елементів стрілової системи і ваги противаг щодо крапки ПРО1

Унаслідок того, що хобот робить складне плоскопараллельное рух, його вага потрібно привести до елемента, що обертається щодо крапки ПРО1, тобто стрілу, і взяти момент цієї приведеної сили щодо крапки ПРО1. При цьому розглянемо рівновагу хобота.
 Силу GOT розкладемо по кінцях відтягнення.
Силу GOT розкладемо по кінцях відтягнення.
Приймають, щоб ідеальне зрівноважування було на середньому вильоті стріли крана, тобто в приведених значеннях момент від ваги елементів стрілової системи буде дорівнює моменту від ваги противаги

Приймають, що противага повинна ідеально врівноважувати стрілову систему на середньому вильоті

Плечем противаги  задаються конструктивно, виходячи з конструктивних і експлуатаційних розумінь
задаються конструктивно, виходячи з конструктивних і експлуатаційних розумінь
Конструктивні розуміння
При збільшенні зменшується маса противаги, а значить і маса крана і навпаки, при збільшенні маси противаги збільшуються його розміри і вітрове навантаження, що діє на противагу, а значить і на кран
Експлуатаційні розуміння
При збільшенні збільшується задній габарит крана, що можливо приведе до зіткнення з поруч коштує краном при роботі вузьким чи фронтом при зближенні кранів

Визначивши вагу противаги, побудуємо момент від противаги щодо крапки ПРО1, для всіх крапок вильоту.
На практиці може бути дві криві противаги, що накладаємо на графік. Прийнятність тієї чи іншої кривої (I чи II) визначається питаннями безпеки, щоб при поломці механізму зміни вильоту, стріла установилася в безпечне середнє положення. Прийнятної є крива I.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 406; Нарушение авторских прав?; Мы поможем в написании вашей работы!