КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Датчики углового ускорения 1 страница
|
|
|
|
Датчики измеряют составляющие угловых ускорений в связанных осях. Работа датчика может быть построена на прямых и косвенных методах измерения углового ускорения.
Прямые методы измерения используют закон момента количества движения. Косвенные методы измерения основаны на свойствах гироскопической системы дифференцировать угловую скорость и возможности электрического дифференцирования угловой скорости.
В датчиках чаще применяется прямой метод, базирующийся на измерении момента инерции массы чувствительного элемента датчика при действии на него углового ускорения. По структурной схеме различают датчики прямого преобразования и компенсационные приборы. Основными элементами датчика прямого преобразования являются инерционная масса (маховик), пружина, демпфер и преобразователь углового перемещения. В компенсационном приборе, кроме того, содержится датчик момента и усилитель обратной связи (электрическая пружина). Чувствительным элементом датчика является точно сбалансированный маятник крутильных колебаний в виде маховика, обладающий одной степенью свободы углового перемещения вокруг своей оси и удерживаемый от вращения пружинами.
Схему преобразования измеряемого параметра в электрический сигнал представим в следующем виде:  .
.
При действии углового ускорения  самолета основание датчика реагирует на составляющую
самолета основание датчика реагирует на составляющую  углового ускорения в направлении измерительной оси (например, ОХ), которое совпадает с осью маховика датчика. При этом на маховике возникает момент инерции ММ, маховик поворачивается и деформирует пружины. Мерой измеряемого ускорения служит угловое перемещение
углового ускорения в направлении измерительной оси (например, ОХ), которое совпадает с осью маховика датчика. При этом на маховике возникает момент инерции ММ, маховик поворачивается и деформирует пружины. Мерой измеряемого ускорения служит угловое перемещение  массы маховика, при котором момент инерционных сил уравновешивается моментом упругих сил пружины.
массы маховика, при котором момент инерционных сил уравновешивается моментом упругих сил пружины.
Величина углового перемещения маховика  , где k – частота собственных колебаний маятника. Угловое перемещение преобразуется в изменение, например, индуктивности
, где k – частота собственных колебаний маятника. Угловое перемещение преобразуется в изменение, например, индуктивности  и далее в электрический сигнал
и далее в электрический сигнал  .
.
В компенсационном приборе угловое перемещение маховика может быть преобразовано в электрический сигнал с помощью индукционного датчика угла, связанного с магнитоэлектрическим датчиком противодействующего момента через фазочувствительный детектор. При ускоренном вращении самолета вокруг измерительной оси между основанием датчика и маховиком (взвешенным в жидкости) возникает угол рассогласования, а на выходе датчика угла появляется напряжение, по величине пропорциональное углу рассогласования, и по фазе соответствующее знаку этого угла. Напряжение датчика угла подается на автономный усилитель.
Инструментальные погрешности являются определяющими в суммарной погрешности датчиков. К инструментальным погрешностям компенсационного прибора следует отнести, прежде всего, статическую и динамическую погрешности коэффициента передачи, т.е. отношения величины выходного сигнала прибора к величине углового ускорения. Погрешность датчика углового ускорения, с индуктивным преобразователем обусловлена, в основном, нестабильностью во времени упругих свойств и физических характеристик элементов и узлов датчика, а также электрических параметров источника питания. Существенная доля в погрешности датчика обусловлена влиянием неизмеряемых составляющих угловой скорости и углового ускорения. Необходимым для стабильной работы датчика при воздействии составляющих угловой скорости по неизмеряемым осям является обеспечение равенства главных моментов инерции маховика маятника Нечувствительность датчика к неизмеряемым угловым ускорениям, а также составляющие инструментальной погрешности сводятся к приемлемому значению путем применения специальных схемно–конструктивных и технологических решений. Динамические свойства этих датчиков отличаются весьма высокой собственной частотой ( 300 Гц) и оцениваются амплитудно–частотными характеристиками.
300 Гц) и оцениваются амплитудно–частотными характеристиками.
Датчики на ЛА крепятся жестко. Требования к их установке аналогичны требованиям к установке линейных акселерометров и датчиков угловой скорости.
3. ДАТЧИКИ УГЛОВОГО ПОЛОЖЕНИЯ САМОЛЕТА В ПРОСТРАНСТВЕ
Углы тангажа, крена и рыскания, т.е. углы между осями связанной и нормальной систем координат, определяют положение самолета относительно естественного горизонта или истинной вертикали.
Эти параметры измеряют чаще с помощью датчиков гироскопических вертикалей (гировертикалей).
Особенность гироскопического датчика заключается в том, что направление его кинетического момента сохраняется неизменным в пространстве, а не относительно Земли или перемещаемого самолета. Допустимая погрешность определения направления истинной вертикали должна быть менее 1°. С этой целью для измерения углов крена и тангажа самолета наиболее широко применяются датчики гировертикали с силовой гироскопической стабилизацией. Датчик ЦГВ представляет собой двухгироскопную гиростабилизированную платформу, корректируемую по вертикали жидкостным маятниковым элементом. Повышенная точность датчика по сравнению, например, с одногироскопными датчиками, достигается благодаря применению принципа силовой гироскопической стабилизации.
В датчике ЦГВ выбрана малая скорость прецессии от коррекции, снижающая погрешность в полете, так как в этом случае гировертикаль под действием линейных и угловых ускорений восстанавливается и выдерживается более точно.
Съем сигналов, пропорциональных углам крена и тангажа, проводится с нескольких потенциометрических преобразователей, имеющих различные диапазоны измерений.
При определении маневренных и аэродинамических характеристик применяется датчик ЦГВ другой модели. В этом приборе съем сигнала проводится с помощью многошкальных потенциометров.
Для измерения курса самолета применяется, как правило, штатная курсовая система.
4. ДАТЧИКИ АЭРОДИНАМИЧЕСКИХ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ
Угол атаки и угол скольжения являются углами, определяющими направление скорости летательного аппарата в связанной системе координат и в системе координат, связанной с пространственным углом атаки.
Измерение углов атаки и скольжения осуществляется, в основном, с помощью датчиков ДУАС флюгерного типа. Получили применение также щелевые датчики.
Флюгерные датчики состоят из статически уравновешенных крылышек, которые устанавливаются по потоку, совпадающему с направлением скорости самолета (скоростная ось). Угол между осью симметрии крылышек и осью корпуса датчика измеряется потенциометрическими преобразователями. Измерение углов атаки и скольжения проводится независимо.
Датчики на самолете устанавливаются, по возможности, в невозмущенном потоке, чаще всего на штанге, расположенной впереди фюзеляжа.
Датчикам флюгерного типа свойственны следующие погрешности:
· на дозвуковых скоростях местные углы потока могут отличаться (вследствие его искажения) от углов атаки самолета;
· на сверхзвуковых скоростях точность измерения параметров в существенной мере определяется степенью деформирования и уровнем вибрации штанги, на которой установлен датчик.
Известное применение при летных испытаниях получили комбинированные датчики, измеряющие в скоростной системе осей координат самолета кроме углов атаки и скольжения, например, приборную скорость, температуру заторможенного потока воздуха, перегрузку.
Лекция 7
Тема: ДАТЧИКИ ДАВЛЕНИЯ
Давление – наиболее распространенная физическая величина, измеряемая при летных испытаниях. Измерения давления воздуха и жидкости составляют около 25% объема измерений всех неэлектрических величин. При отсчете показаний датчика от абсолютного нуля (полного вакуума) полученное давление называют абсолютным. Если же показания датчика отсчитываются от абсолютного давления окружающей среды (атмосферного давления), полученное давление называют избыточным. При летных испытаниях часто измеряют разность двух давлений, ни одно из которых не является давлением окружающей среды. Эту разность называют перепадом давлений.
Для измерения давлений на борту ЛА используются датчики, чувствительные элементы которых представляют плоские и гофрированные мембраны и мембранные коробки.
Чувствительные элементы первого вида применяются при измерениях давлений высоких уровней в магистралях (давление топлива, давление в гидравлических системах), чувствительные элементы второго типа используются при измерениях малых давлении и перепадов.
|
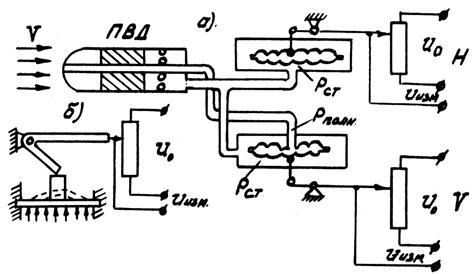
Рис. 1. Схемы измерения давлений с потенциометрическим преобразованием сигнала.
На рис. 1а показана схема измерения статического Р ст и полного Р полн давлений, используемых при измерении барометрической высоты Н и скорости полета V. На рис. 1б дана схема датчика давления с плоской мембраной, перемещения которой преобразуются в электрический сигнал потенциометром.
Мембранные коробки бывают двух типов: анероидные – для измерений абсолютных давлений, в частности, высоты полета, и манометрические – для измерения перепадов давления, в частности, воздушной скорости.
Если пренебречь инерционностью чувствительного элемента, то уравнение, описывающее работу датчика давления, можно записать в виде
при начальном условии  . Здесь
. Здесь  – давление, действующее в полости датчика;
– давление, действующее в полости датчика;  – давление на входе датчика;
– давление на входе датчика;  – постоянная времени.
– постоянная времени.
С учетом инерционности упругого элемента и передаточно–множительного механизма, уравнение датчика будет
при начальных условиях  и
и  .
.
В уравнении m – подвижная масса в датчике, включающая часть мембраны, передаточный механизм и щетку потенциометра (рис. 1б); k1 и с1 – демпфирование и жесткость возвратных пружин соответственно; u(t) – текущее значение прогиба.
Кроме рассмотренных мембран в датчиках давлений используются и другие чувствительные элементы – сильфоны и трубки Бурдона.
Датчики давления делятся на две группы: для измерения давлений в агрессивных средах (корпус красного цвета, в шифре буква «К») а для измерений давления кислорода (на корпусе голубая полоса, в шифре буква «Г»). Применение датчиков группы «К» для измерения давления кислорода запрещается.
1. ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ
На рис. 2 приведена классификация принципов построения датчиков давления для летных испытаний.
|
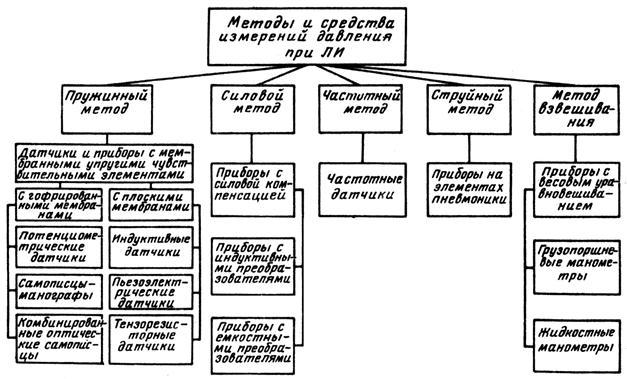
Рис. 2. Методы построения датчиков давления при летных испытаниях.
Широкое применение нашел пружинный метод.
Датчики с гофрированными мембранами используются, в основном, для измерения воздушных параметров полета (высоты и скорости) и медленноменяющихся (с частотой до 1...3 Гц) давлений, например, по тракту газотурбинных двигателей.
Потенциометрические датчики получили широкое распространение благодаря большому выходному сигналу, который можно регистрировать непосредственно аппаратурой точной магнитной записи или светолучевыми осциллографами.
Требования миниатюризации и обеспечения эксплуатации в сложных условиях обусловили интенсивное развитие и внедрение индуктивных, пьезоэлектрических и тензорезисторных датчиков давления с плоскими мембранами. Датчики могут измерять давления в широких амплитудных, частотных и температурных диапазонах.
Индуктивные и тензорезисторные датчики осуществляют, в принципе, функции измерения как постоянной, так и переменной составляющих давления. Пьезоэлектрические датчики измеряют только переменную составляющую давления. Решающее достоинство тензорезисторных датчиков заключается в достижении высокого уровня их миниатюризации.
Получили развитие частотные датчики, а также приборы, основанные на методе силовой компенсации. Эти датчики и приборы обладают повышенной точностью и применяются, в основном, для измерения воздушных параметров полета. Создаются также приборы, основанные на элементах пневмоники, с обеспечением, в первую очередь, функции измерений малых воздушных скоростей.
Метод взвешивания, основанный на уравновешивании давления гирями или столбом жидкости, используется, как правило, в образцовых средствах измерений давления.
Типовая структурная схема преобразования сигналов в датчиках давления приведена на рис. 3.
|

Рис. 3. Структурная схема преобразований сигнала в датчиках давления
На схеме обозначено: 1 – звено, отображающее процесс передачи давления (по трубопроводу, приемнику давления, через защитный экран); 2 – звено, отображающее установку датчика на объекте; 3 – упругий элемент (преобразователь давление – сила); 4 – связующее упругого элемента с чувствительным элементом; 5 – чувствительный элемент (преобразователь неэлектрической величины в электрический сигнал); 6 – измерительная цепь.
Схема объединяет индуктивные, тензорезисторные и другие датчики, в которых применяется преобразование деформации упругого элемента в относительное изменение сопротивления. Она описывает большую номенклатуру датчиков, отличающихся между собой диапазонами измерений, конструктивным оформлением, условиями эксплуатации.
2. МЕТОДЫ ОТБОРА ИЗМЕРЯЕМОГО ДАВЛЕНИЯ
Эти методы определяются допустимостью и возможностью вмешательства в объект исследования (рис. 4).
|
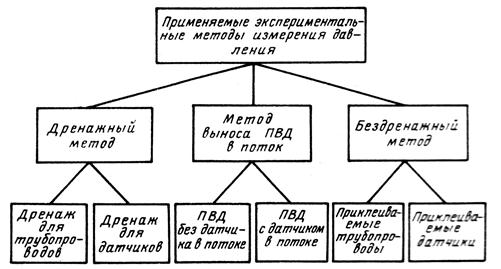
Рис. 4. Экспериментальные методы измерения давления.
Они обусловили и соответствующие способы установки датчиков (рис. 5).
|
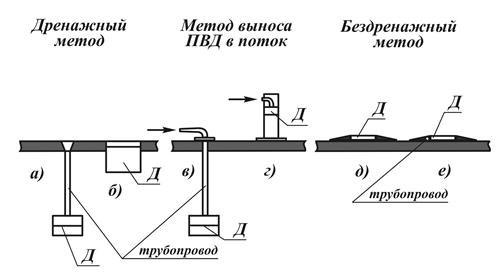
Рис. 5. Принципиальная схема способов установки датчиков,
реализующих три метода отбора измеряемого давления:
а) давление к датчику Д подается по пневмотрассе (трубопроводу); б) мембрана датчика Д установлена заподлицо с исследуемой поверхностью объекта; в) ПВД с датчиком Д, вынесенным из потока; г) ПВД с датчиком Д в потоке; д) приклеиваемый датчик давления Д; е) приклеиваемые трубопровод и датчик давления Д.
Традиционным является дренажный метод, применяемый, например, при измерении давления на крыле самолета. Однако в целом ряде случаев применение дренажного метода невозможно. Кроме того, этот метод отличает большая трудоемкость и сложность оборудования. Наконец, возможны источники погрешностей, вызванные конструктивными и технологическими несовершенствами дренированных точек трубопроводов, а также динамические погрешности, обусловленные наличием механической и акустической колебательных систем. Указанные недостатки практически исключили его применение, например, при измерении давления на несущих поверхностях ЛА. Основные источники погрешностей дренажного метода представлены на рис. 6.
|
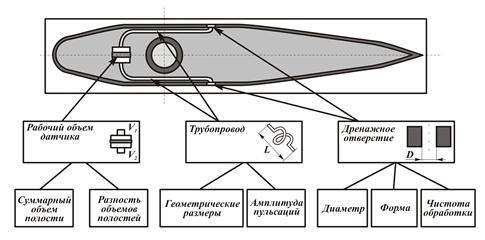
Рис. 6. Возможные источники погрешностей дренажного метода измерения давления.
При использовании метода выноса ПВД в поток применяют различные типы приемников (насадков). Наиболее сложным является измерение давления с выносом датчика в поток. При многоточечных измерениях применяются групповые приемники. Эксплуатация в летных условиях предъявляет жесткие требования к их конструкции. ПВД должны обладать механической прочностью при минимальном сечении и возможностью установки требуемой группы датчиков быстроменяющихся давлений и приемников медленноменяющихся давлений. Необходима организация системы противодавления для применения датчиков повышенной чувствительности, а также минимальная чувствительность датчика к скосам набегающего потока в широком диапазоне изменения углов.
Важным фактором является оперативное выполнение монтажа электрических и пневматических линий связи и возможность метрологического контроля датчиков давления на объекте.
Бездренажный метод основан на применении миниатюрных датчиков давления, устанавливаемых на наружной поверхности исследуемой конструкции. Этот метод обладает рядом достоинств:
· универсальностью применения,
· невмешательством конструкции несущей поверхности,
· возможностью измерения абсолютного и перепадов давления в большом числе точек,
· сравнительно малым временем, необходимым для препарирования исследуемой конструкции.
Для реализации метода созданы и внедрены миниатюрные датчики давления плоской конструкции, габаритные размеры которых допускают их установку на поверхности ЛА. Датчики работают при воздействии инерционных сил и деформации объекта измерения, а также при аэродинамическом нагреве поверхности. Установка их несложна и надежна. Кроме того, обеспечивается простота замены датчиков и возможность их повторного применения.
Датчик даже в миниатюрном исполнении, установленный на наружной поверхности, представляет собой постороннее тело, которое может нарушить структуру обтекания. Поэтому важен выбор такого способа его установки, при котором эти нарушения пренебрежимо малы. В практике летных испытаний широкое применение получил способ установки датчиков давления в ленточном обтекателе (рис. 7).
|

Рис. 7. Бездренажная установка датчиков давления.
В сечении обтекатель представляет собой полусферическую поверхность, выполненную с помощью герметика.
Максимальная толщина средней части обтекателя равна высоте датчика, поэтому мембрана датчика оказывается заделанной заподлицо с поверхностью обтекателя. Применяются местные обтекатели, а также профильные обтекатели, охватывающие верхнюю и нижнюю поверхности объекта измерения.
Технологические операции по монтажу электрических проводов, сборке схем измерения, грунтовке и покраске препарированного участка поверхности аналогичны операциям при тензометрировании подобных элементов конструкции.
Датчики давления по видам решаемых задач и реакции на входное воздействие, обусловливающий выбор соответствующей аппаратуры точной магнитной записи, можно разделить на две группы.
Первая обширная группа датчиков, наряду с измерением воздушных параметров полета, решает задачи измерений медленноменяющихся параметров давлений ( ) на несущих поверхностях летательного аппарата, по тракту и в агрегатах силовой установки, а также в системах самолетного оборудования. Наиболее широкое применение в этой группе получили потенциометрические датчики, индуктивные датчики с автономными или встроенными согласующими устройствами, система датчик–пневмокоммутатор.
) на несущих поверхностях летательного аппарата, по тракту и в агрегатах силовой установки, а также в системах самолетного оборудования. Наиболее широкое применение в этой группе получили потенциометрические датчики, индуктивные датчики с автономными или встроенными согласующими устройствами, система датчик–пневмокоммутатор.
Изучение аэродинамики и прочности несущих конструкций летательных аппаратов, исследование условий совместной работы воздухозаборника и газотурбинного двигателя потребовало внедрения комплекса средств измерений быстроменяющихся параметров давлений. Поэтому во второй группе широко распространены индуктивные датчики с автономными усилителями на несущей частоте, пьезоэлектрические датчики с усилителями переменного тока и тензорезисторные датчики с дифференциальными усилителями.
Лекция 8
3. ПОТЕНЦИОМЕТРИЧЕСКИЕ ДАТЧИКИ
Эти датчики охватывают практически весь диапазон величин измеряемых давлений, работают длительно при температуре окружающей среды до 2000С с погрешностью  5%, имеют малые габаритные размеры и массу (200 г). Динамические свойства датчиков невысоки. Собственная частота лежит в пределах 2...20 Гц.
5%, имеют малые габаритные размеры и массу (200 г). Динамические свойства датчиков невысоки. Собственная частота лежит в пределах 2...20 Гц.
Ограничение частотного диапазона вызвано наличием механических связей и значительных присоединенных масс в кинематических цепях датчиков, что создает большую инерционность и снижает собственную частоту датчика.
Другим важным фактором, снижающим динамические свойства датчиков, является необходимость обеспечения устойчивого контакта между движком и обмоткой измерительного потенциометра. При больших скоростях перемещения движка возможна потеря контакта. Это явление особенно свойственно проволочным потенциометрам, контактная дорожка у которых представляет собой волнообразную поверхность. Наличие механических вибраций при работе датчика увеличивает вероятность нарушения контакта. В этом случае имеет место явление «подскока» движка, особенно на резонансных частотах, когда искажается не только амплитуда, но и частота исследуемого процесса. Неустойчивая работа датчика может наблюдаться как на малых частотах и больших амплитудах колебаний давления, так и наоборот, на высоких частотах и малых амплитудах давления. У датчиков, способных работать в неустойчивом режиме, определяют, как правило, амплитудно–частотные характеристики на фиксированных частотах, доводя их работу до режима неустойчивости, и выявляют границы устойчивой работы.
4. ДАТЧИКИ С ПНЕВМОКОММУТАТОРАМИ ДАВЛЕНИЯ
Применяются эти датчики для измерения большого числа, медленноменяющихся параметров давления при обеспечении высоких требований к точности измерения. Характерной особенностью прибора является наличие в нем коммутатора давления – устройства, позволяющего использовать один датчик для последовательного измерения давления в нескольких десятках точек. Применение пневмокоммутаторов в сравнении с применением коммутаторов электрических сигналов дает ряд преимуществ: значительно сокращается состав аппаратуры, упрощается система в целом. Наличие контрольного датчика в системе позволяет повысить точность измерений. Основным недостатком пневмокоммутатора является его низкое быстродействие (из–за инерционности механической системы и длительности переходных процессов в полостях коммутатора и датчика при переключении). Пневмокоммутаторы по конструктивному исполнению можно классифицировать на: золотниковые и клапанные. Наибольшее применение нашли пневмокоммутаторы первой группы. Высокие требования предъявляются к датчику давления. Функциональная схема работы системы приведена на рис. 1.
|
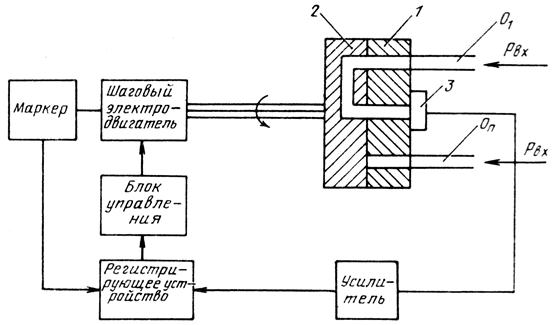
Рис. 1. Система датчик–пневмокоммутатор давления.
Принцип действия пневмокоммутатора реализуется золотниковыми устройствами с плоской рабочей парой. Схема основного рабочего узла состоит из двух дисков – неподвижного 1 и поворотного 2, плотно прилегающих друг к другу, что достигается высокой точностью и чистотой обработки поверхности. В неподвижном диске имеются расположенные по окружности отверстия О1 и Оп, к которым подключаются пневмотрассы от точек измерений. Центральное отверстие неподвижного диска соединено с рабочей полостью датчика 3. При вращении от шагового электродвигателя канал в поворотном диске последовательно через пневморазъем соединяет отверстия в неподвижном диске с его центральным отверстием, т.е. с датчиком. Регистрирующее устройство через усилитель фиксирует электрические сигналы датчика в виде последовательности импульсов, амплитуда которых пропорциональна, величине измеряемого давления. Для определения последовательности опроса измеряемого давления на параллельный канал регистрирующего устройства записываются сигналы маркера в виде чередования прямоугольных импульсов. Начало отсчета совпадает с опросом первого канала и отличается минимальным значением импульса маркерного устройства.
Система может работать с регистрирующим устройством в режиме внешней синхронизации и автономном режиме. Она получила наибольшее распространение при измерении полей давления по тракту газотурбинных двигателей.
5. ИНДУКТИВНЫЕ ДАТЧИКИ
Эти датчики входят в группу электромагнитных датчиков, реализующих две основные разновидности функций преобразования – индуктивность и взаимную индуктивность, что определяет два основных типа электромагнитных датчиков – индуктивные и трансформаторные. Принцип действия этих датчиков основан на зависимости индуктивности или взаимной индуктивности обмоток на магнитопроводе от изменения длины воздушного зазора. Трансформаторные датчики давления утратили свое преимущество перед индуктивными датчиками, связанное с усилением электрического сигнала с помощью дополнительных обмоток, размещенных в корпусе датчика. Эти функции взяли на себя стабильные микроэлектронные измерительные усилители. Отсутствие же дополнительных обмоток в корпусе индуктивного датчика открывает большие возможности миниатюризации. На практике, как правило, применяют индуктивные дифференциальные датчики, обеспечивающие меньшее влияние электромагнитных сил на упругий элемент, увеличение линейного участка функции преобразования и уменьшение температурной погрешности. В датчиках под воздействием давления одновременно и притом с разными знаками изменяются два зазора двух электромагнитов. Поэтому дифференциальные датчики в сочетании с мостовой измерительной схемой имеют более высокую чувствительность.
В качестве упругих элементов применяются круглые плоские мембраны, работающие при малых прогибах. В лучших образцах датчиков материалом мембраны, выполненной за одно целое с кольцом жесткости, служит коррозионностойкая сталь 4X13. Она сохраняет упругие свойства до 400°С. Герметичность приемных полостей осуществляется притиркой соприкасающихся плоскостей корпуса и упругого чувствительного элемента датчика, а герметизация электрических выводов обеспечивается с помощью специального герметика. В качестве намоточных проводов применяются термостойкие провода в эмалевой изоляции. Эластичность эмалей позволяет изготовить малогабаритные катушки индуктивности, работающие при температурах до 200...300°С. Индуктивные датчики нашли широкое применение для измерения давления при повышенных температурах окружающей среды.
Основную долю в суммарной погрешности датчика составляют аддитивная (уход нуля) и мультипликативная (изменение чувствительности) составляющие температурной погрешности. Они определяются рядом факторов. Уход нуля определяется, в основном, асимметрией геометрических размеров магнитных сердечников, активных сопротивлений катушек, воздушных зазоров и расположения катушек в корпусе датчика. Изменение чувствительности датчика определяется нестабильными температурной зависимостью модуля упругости материала упругого чувствительного элемента, удельной электрической проводимостью материалов провода обмотки и сердечника, а также магнитной проницаемостью. Аддитивная составляющая температурной погрешности датчика может быть существенно уменьшена путем применения конструктивно–технологического метода совершенствования датчика. Компенсация мультипликативной составляющей температурной погрешности достигается применением специальных методов, учитывающих электромагнитные параметры датчика.
Для измерения пульсаций давлений при высоких температурах (в камере сгорания газотурбинного двигателя) применяются датчики с активной тепловой защитой. Датчик может быть вынесен из горячей зоны с помощью трубопровода длиной до одного метра и диаметром 6 мм. Частота свободных колебаний такого акустического тракта составляет, примерно 85 Гц. Системы измерения пульсаций давления с индуктивными датчиками работают с противодавлением, которое осуществляет пневматическое центрирование измеряемого процесса. Это позволяет повысить точность измерений, применять датчики с большей чувствительностью, рассчитанные только на диапазон измерения переменной составляющей давления. Постоянная времени системы противодавления, состоящая из демпфера и ресивера, составляет 1,5 с, что обеспечивает измерение процесса, начиная с частоты 1 Гц. Индуктивные датчики с автономными усилителями позволяют измерять переменные давления в диапазоне частот более 1000 Гц. При применении высокочастотных датчиков давления самым низкочастотным звеном оказывается акустический тракт приемника давления с присоединенным объемом рабочей полости датчика.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 5145; Нарушение авторских прав?; Мы поможем в написании вашей работы!