КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основні властивості плану швидкостей та прискорень
|
|
|
|
1) Усі точки механізму, швидкості (прискорення) яких дорівнюють нулю, на плані швидкостей (прискорень) знаходяться в полюсі.
2) Усі вектори, що виходять з полюса плану швидкостей (прискорень), є векторами абсолютних швидкостей (прискорень).
3) Усі вектори плану, що з’єднують кінці векторів абсолютних швидкостей (прискорень), є векторами відносних швидкостей (прискорень). Замірявши відповідні відрізки (в мм) на плані швидкостей (прискорень) та помноживши їх на масштаб  , знаходимо дійсні (за модулем) значення швидкостей (прискорень).
, знаходимо дійсні (за модулем) значення швидкостей (прискорень).
4) Для плану швидкостей та прискорень дійсна теорема подібності.
Приклад 2. На рис. 2.11, а показана кінематична схема механізму поперечно-стругального верстата. В його склад входять початкова ланка 1 та дві групи Ассура ІІ класу: група, що складається з ланок 2 та 3 третього виду, та група ІІ(4,5) п’ятого виду.
Необхідно побудувати плани швидкостей і прискорень для положення визначеного кутом  . Кутова швидкість
. Кутова швидкість  кривошипа
кривошипа  = const.
= const.
Знаходимо швидкість т. В, яка належить ланці 1,  м/с.
м/с.
Від полюса  плану швидкостей відкладаємо відрізок
плану швидкостей відкладаємо відрізок  , який зображує вектор швидкості vB (Рис. 2.11, б). При цьому масштаб плану швидкостей дорівнює
, який зображує вектор швидкості vB (Рис. 2.11, б). При цьому масштаб плану швидкостей дорівнює

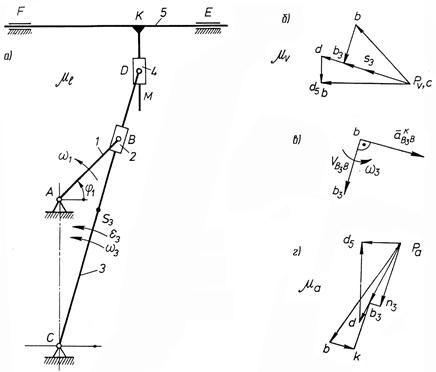
Рис. 2.11
Переходимо до визначення швидкостей точок ланок першої структурної групи. Відомі швидкості точок В і С, які належать зовнішнім кінематичним парам групи: швидкість т. , яка належить ланці 2 (повзуну), дорівнює швидкості т. В кривошипа (першої ланки), тобто
, яка належить ланці 2 (повзуну), дорівнює швидкості т. В кривошипа (першої ланки), тобто  . Невідома швидкість точки
. Невідома швидкість точки , яка належить ланці 3, кулісi і в даному положенні механізму, співпадає з т. В, що лежить на кривошипі (повзуні). Для її визначення записуємо систему векторних рівнянь
, яка належить ланці 3, кулісi і в даному положенні механізму, співпадає з т. В, що лежить на кривошипі (повзуні). Для її визначення записуємо систему векторних рівнянь

За першим рівнянням з точки b, кінця вектора  (швидкості т. В) проводимо пряму, паралельну до ланки CD (
(швидкості т. В) проводимо пряму, паралельну до ланки CD ( є швидкість відносного поступального руху повзуна 2 по напрямній 3; напрямлена вздовж неї). За другим рівнянням з точки с, яка співпадає з полюсом pV, (vc = 0), проводимо пряму, перпендикулярну до ВС. На перетині цих прямих одержуємо точку b3. Вектор
є швидкість відносного поступального руху повзуна 2 по напрямній 3; напрямлена вздовж неї). За другим рівнянням з точки с, яка співпадає з полюсом pV, (vc = 0), проводимо пряму, перпендикулярну до ВС. На перетині цих прямих одержуємо точку b3. Вектор  зображує швидкість
зображує швидкість  точки , що належить кулісі.
точки , що належить кулісі.
Використовуючи теорему подібності, знаходимо положення точки D на плані швидкостей
Відкладаємо відрізок сd на продовженні відрізка cb3  , знаходимо точку d.
, знаходимо точку d.
Швидкість т. D5, яка належить ланці 5, визначаємо з рівняння

Усі точки ланки 5 рухаються вздовж напрямної EF, тобто абсолютна швидкість т. D5 паралельна напрямній,  Таким чином, з полюса pv проводимо пряму, паралельну до EF, а з т. d – пряму, паралельну до КМ. На перетині одержуємо т. d5. Сполучаємо її з полюсом pV.
Таким чином, з полюса pv проводимо пряму, паралельну до EF, а з т. d – пряму, паралельну до КМ. На перетині одержуємо т. d5. Сполучаємо її з полюсом pV.
Положення т. S3 знаходимо за теоремою подібності з пропорції
 .
.
Вимірявши відповідні відрізки в мм, множимо їх на масштаб  і одержуємо величини шуканих швидкостей
і одержуємо величини шуканих швидкостей
 .
.
Кутову швидкість ланки 3 визначимо за формулою  . Напрямок цієї швидкості знаходимо за допомогою вектора швидкості
. Напрямок цієї швидкості знаходимо за допомогою вектора швидкості  . Умовно переносимо цей вектор у т. D механізму та спостерігаємо за умовним обертанням ланки 3 відносно точки С проти руху стрілки годинника. Таким чином,
. Умовно переносимо цей вектор у т. D механізму та спостерігаємо за умовним обертанням ланки 3 відносно точки С проти руху стрілки годинника. Таким чином,  напрямлена у той же бік.
напрямлена у той же бік.
Побудова плану прискорень. Прискорення т. В, яка належить ланці 1 кривошипу, визначається за формулою

Від полюса pa (рис. 2.11, г) відкладаємо відрізок pab паралельно до ланки АВ (у напрямку від т. В до т. А), який зображує прискорення  (
( ). Масштаб плану прискорень при цьому
). Масштаб плану прискорень при цьому  .
.
Визначаємо прискорення т., що належить ланці 3,

У першому рівнянні  , - коріолісове прискорення, яке з’явилось у результаті складання відносного поступального руху повзуна 2 по напрямній 3 зі швидкістю
, - коріолісове прискорення, яке з’явилось у результаті складання відносного поступального руху повзуна 2 по напрямній 3 зі швидкістю  та переносного обертального руху цієї напрямної зі швидкістю . Модуль цього прискорення визначається за формулою
та переносного обертального руху цієї напрямної зі швидкістю . Модуль цього прискорення визначається за формулою
 .
.
Щоб знайти напрямок вектора , необхідно повернути вектор відносної швидкості на кут 900 в напрямку переносної кутової швидкості (рис. 2.11, в). Прискорення  є прискоренням відносного поступального руху повзуна 2 по напрямній 3 і напрямлене вздовж ланки CD. Величина (модуль) його невідома. Нормальне прискорення
є прискоренням відносного поступального руху повзуна 2 по напрямній 3 і напрямлене вздовж ланки CD. Величина (модуль) його невідома. Нормальне прискорення  визначається за формулою
визначається за формулою  , воно напрямлене від точки В до точки С паралельно до ланки СВ. Дотичне прискорення
, воно напрямлене від точки В до точки С паралельно до ланки СВ. Дотичне прискорення  напрямлене перпендикулярно до ланки ВС. Визначаємо відрізки bk i pan3, які зображують прискорення
напрямлене перпендикулярно до ланки ВС. Визначаємо відрізки bk i pan3, які зображують прискорення  на плані
на плані

 .
.
Відкладаємо від точки b плану прискорень відрізок bk, а від полюса pa відрізок pan3. З точки k проводимо лінію, паралельну до ВС, а з точки n3 - лінію, перпендикулярну ВС до їх перетину між собою. Точку перетину b3 з’єднуємо з полюсом і одержуємо відрізок pab3, який зображує прискорення  точки . Для визначення положення точки D на плані прискорень складаємо рівняння, використовуючи теорему подібності,
точки . Для визначення положення точки D на плані прискорень складаємо рівняння, використовуючи теорему подібності,
 звідки
звідки  .
.
Щоб знайти прискорення точки  , яка належить ланці 5, записуємо векторне рівняння
, яка належить ланці 5, записуємо векторне рівняння
 ,
,
 .
.
Прискорення  напрямлене вздовж напрямної EF, а відносне (релятивне) прискорення
напрямлене вздовж напрямної EF, а відносне (релятивне) прискорення  - вздовж КМ. З полюса рa проводимо лінію, паралельну до EF, а з точки d – лінію, паралельну до КМ. На перетині цих ліній одержуємо точку
- вздовж КМ. З полюса рa проводимо лінію, паралельну до EF, а з точки d – лінію, паралельну до КМ. На перетині цих ліній одержуємо точку  . Величини знайдених прискорень дорівнюють
. Величини знайдених прискорень дорівнюють
 ;
;
 .
.
Модуль кутового прискорення  ланки 3 знайдемо за формулою
ланки 3 знайдемо за формулою
 .
.
Напрямок знаходимо з допомогою дотичного прискорення . Переносимо вектор  , що зображає .на плані, у точку В механізму і бачимо, що він вказує на умовне обертання ланки 3 навколо точки С проти руху стрілки годинника.
, що зображає .на плані, у точку В механізму і бачимо, що він вказує на умовне обертання ланки 3 навколо точки С проти руху стрілки годинника.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 1544; Нарушение авторских прав?; Мы поможем в написании вашей работы!