КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механический схват
|
|
|
|
Классификация схватов промышленных роботов
Конструкция механизмов схватов роботов
Системы координат руки манипулятора
Прямоугольная (декартова) Цилиндрическая
Сферическая Угловая (ангулярная)
Промышленные роботы применяются на самых разнообразных операциях и работают с деталями, резко отличающимися по прочности, массе, габаритам, конфигурации, расположению центра масс, шероховатости поверхности. Детали могут быть изготовлены из различных металлов, керамики, стекла, пластмассы. Это могут быть и массивные поковки и крупногабаритная тара из пластмассы, стальные листы, кирпич, листы из стекла и стеклянные трубки.
Один и тот же робот может транспортировать собранные узлы, тару с насыпанными мелкими деталями, емкость с жидкостью и, кроме этого, работать различным инструментом — распылителем, гайковертом, пневмоотверткой. Поэтому обычно для каждой модели робота создается большое число всевозможных схватов, которые при необходимости легко и быстро заменяются и монтируются на кисти. В некоторых конструкциях роботов схваты могут меняться автоматически в соответствии с записанной программой.
1) механические с жесткими или пружинящими губками;
2) с вакуумными присосками;
3) с электромагнитами;
4) с сенсорными датчиками;
5) прочие схваты, в том числе схваты, несущие инструмент.
В качестве приводов механических схватов используются гидро- и пневмоцилиндры, штоки которых через систему рычагов или других механизмов приводят схваты в действие.
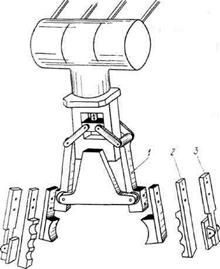
К механическим схватам относится схват с рычажно-кулисным приводом.
Рисунок 22 - Схват с рычажно-кулисным приводом: 1 — рычаг; 2,3— губки
На рисунке 22 представлен схват с рычажно-кулисным приводом и сменными губками 2, 3 к нему. Для деталей, имеющих параллельные плоскости, применяются самоустанавливающиеся губки схвата 3. Если диаметр детали меняется после обработки, то используются губки 2 для деталей разных диаметров.
С данными схватами применяется кисть с двойным схватом (применяется в тех случаях, когда в процессе обработки меняется форма и размеры детали).
Рисунок 23 - Кисть с двумя схватами
Для работы с длинными и тонкими трубками используется схват с пневмоцилиндром (рис.24). При включении пневмоцилиндра - 2 пальцы - 1 и 4 двигаются по дуге, пока не встанут перпендикулярно оси трубки, далее они входят в трубку и зажимают её.
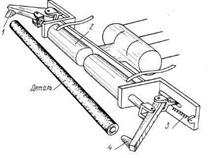
Рисунок 24 - Схват для длинных тонких труб: 1,4 — палец; 2 — пневмоцилиндр; 3— пружина
Схват с пневмоприводом используется для работы с длинномерными деталями, имеющими в сечении неправильную форму. Кисть с подобными схватами показана на рисунке 25. Кисть имеет длинную балку - 3, на концах которой смонтированы два схвата - 2, имеющих по одному приводному пневмоцилиндру - 1.
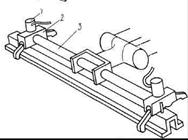
Рисунок 25 - Схват для длинномерных деталей: 1 — пневмоцилиндр; 2 — схват; 3— балка
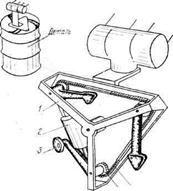
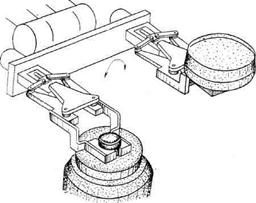
Для переноса больших полых цилиндрических деталей, например емкостей, изготовленных из пластмасс, применяется схват, имеющий конструкцию звездочки, схема которого показана на рисунке 26.
Рисунок 26 – Схват для полых цилиндрических деталей
В углах рамы - 1 на осях установлены три звездочки - 4. На осях звездочек вместе с ними установлено три одинаковых кулачка - 3. Звездочки - 4 охватываются цепью.
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 954; Нарушение авторских прав?; Мы поможем в написании вашей работы!