КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип действия электрического двигателя постоянного тока
|
|
|
|
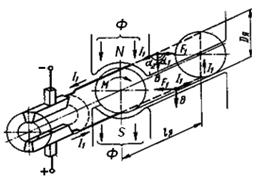
Основные элементы конструкции. Электродвигатель постоянного тока (рис. 3.2) состоит из неподвижного остова 12 с полюсами 6, предназначенными для создания магнитного потока, и вращающегося якоря 8, в котором происходит преобразование электрической энергии в механическую. Остов 12 цилиндрической формы, отлитый из стали, является частью магнитной системы электродвигателя. На внутренней поверхности остова закреплены две или три пары полюсов. Каждый полюс 6 состоит из стального сердечника и обмотки возбуждения 7 из изолированного провода. Обмотки возбуждения полюсов соединены между собой так, что при протекании тока по этой цепи, северные N и южные S полюса чередуются (направление магнитного потока в полюсах и остове показано на рис. 3.2 стрелками). Якорь электродвигателя 8 состоит из стального цилиндрического сердечника и коллектора 4, насаженных на вал 9. На сердечнике якоря 8 по окружности располагаются продольные пазы 13, в которых находятся изолированные проводники, образующие обмотку якоря.
При работе электродвигателя по всем проводникам обмотки якоря протекают токи. Силы взаимодействия этих токов с магнитным потоком полюсов вращают якорь. Обмотка якоря соединена с источником электроэнергии через коллектор 4, состоящий из радиально расположенных медных пластин, изолированных друг от друга. К каждой коллекторной пластине припаяны проводники обмотки якоря. Коллектор соединен с внешней цепью через угольно-графитовые стержни 1, называемые щетками. Щетки установлены в неподвижных щеткодержателях 2. Под действием пружин щетки прижаты к коллектору и скользят по его цилиндрической поверхности при вращении якоря. Вал якоря опирается на роликовые или шариковые подшипники 5 и 10, расположенные в подшипниковых щитах 3 и 11. Щиты прикреплены болтами к остову 12.
Вращающий момент электродвигателя. Рассмотрим электродвигатель с двухполюсной магнитной системой (рис. 3.3), в обмотке якоря которого выделены два последовательно соединенных проводника подключенные к двум пластинам коллектора. Как известно из курса физики, на прямолинейный проводник с током  находящийся в однородном магнитном поле с индукцией В, действует сила электромагнитного разрезы электродвигателя постоянного тока
находящийся в однородном магнитном поле с индукцией В, действует сила электромагнитного разрезы электродвигателя постоянного тока
взаимодействия, определяемая законом Ампера,

 3.1
3.1
где  -длина участка проводника, взаимодействующего с магнитным полем;
-длина участка проводника, взаимодействующего с магнитным полем;  -угол между векторами В и .
-угол между векторами В и .
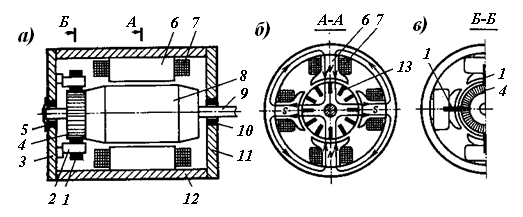
Рис. 3.2. Продольный (а) и поперечные (б, в)
Векторы В и I - перпендикулярны(см. рис. 3.3) и, следовательно,  .
.
Магнитная индукция
 3.2
3.2
Отношение суммарной площади всех полюсов к площади боковой цилиндрической поверхности якоря называется коэффициентом полюсного перекрытия  . Тогда площадь одного полюса
. Тогда площадь одного полюса
 3.3
3.3
Пусть обмотка якоря состоит из N проводников и образует 2а параллельных ветвей. Тогда в проводнике обмотки якоря
 3.4
3.4
Вращающий момент электродвигателя
 3.5
3.5
где 0,5 -плечо силы
-плечо силы  относительно оси якоря; N-число проводников обмотки якоря.
относительно оси якоря; N-число проводников обмотки якоря.
Подставляя в формулу (3.5) выражения (3.1), (3.2), (3.3), (3.4), получим
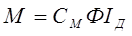 (3.6)
(3.6)
где  -постоянный коэффициент, характеризующий обмотку якоря электрической машины.
-постоянный коэффициент, характеризующий обмотку якоря электрической машины.
Этот коэффициент
 (3.7)
(3.7)
|
Рис. 3.3. Схема, поясняющая принцип работы электродвигателя постоянного тока
Изложенное позволяет сделать следующие выводы:
1. Вращающий момент электродвигателя пропорционален току и магнитному потоку.
2.Вращающий момент не имеет прямой зависимости от угловой скорости якоря. Поэтому электродвигатель может развивать вращающий момент даже при неподвижном якоре, что очень важно для плавного трогания поезда с места.
3.Направление силы и, следовательно, направление вращения
якоря электродвигателя определяются по правилу левой руки. Направление вращения якоря можно изменить двумя способами: либо изменить направление тока в обмотке якоря, либо переменить направление магнитного потока полюсов.
4.Направление вращения якоря можно изменить двумя способа: либо изменить направление тока в обмотке якоря, либо переменить направление магнитного потока полюсов.
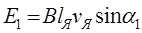
Электродвижущая сила (э. д. с.) вращения. Если якорь электродвигателя вращается, то в каждом проводнике его обмотки индуцируется э. д. с. Е, которая определяется по закону электромагнитной индукции:
 (3.8)
(3.8)
где  - скорость движения проводника обмотки якоря относительно магнитного поля;
- скорость движения проводника обмотки якоря относительно магнитного поля;  — угол между векторами В и vя (так как они перпендикулярны, то sin =1).
— угол между векторами В и vя (так как они перпендикулярны, то sin =1).
Скорость связана с угловой скоростью якоря  известным соотношением
известным соотношением
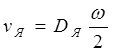 (3.9)
(3.9)
Направление э. д. с.  определяют по правилу правой руки. Чтобы подчеркнуть причину возникновения, ее принято называть э. д. с. вращения. Как увидим далее, она определяет такие важные характеристики электродвигателя, как потребляемый ток и развиваемую механическую мощность.
определяют по правилу правой руки. Чтобы подчеркнуть причину возникновения, ее принято называть э. д. с. вращения. Как увидим далее, она определяет такие важные характеристики электродвигателя, как потребляемый ток и развиваемую механическую мощность.
Определим э. д. с. вращения для всей обмотки якоря. Если обмотка якоря состоит из N проводников и образует 2а параллельных ветвей, то каждая ветвь обмотки состоит из N/(2а) последовательно соединенных проводников. Тогда э. д. с., индуцируемая во всей обмотке якоря,  .
.
Используя выражения (3.1), (3.2), (3.8), (3.9) и имея в виду, что sin =1, получим
 (3.10)
(3.10)
Учитывая формулу (3.7),
 (3.11)
(3.11)
Отсюда следует, что э. д. с. вращения прямо пропорциональна магнитному потоку и угловой скорости вращения якоря.
Угловая скорость якоря электродвигателя. Определим ее, используя закон сохранения энергии. Электрическая мощность, потребляемая электродвигателем из сети,
где Рмех — механическая мощность на валу электродвигателя; rд — сопротивление обмоток электродвигателя.
Выражение представляет собой мощность, затраченную на нагревание обмоток электродвигателя.
представляет собой мощность, затраченную на нагревание обмоток электродвигателя.
Механическая мощность навалу электродвигателя Рмех, как известно, равна произведению вращающего момента М на угловую скорость якоря . Пользуясь выражениями (3.6) и (3.11), можно доказать, что

Таким образом, э. д. с. вращения характеризует преобразование электрической энергии в механическую. Подставив в формулу значения  и
и  , получим
, получим
 (3.12)
(3.12)
Разделив равенство (3.12) на  получим
получим
 (3.13)
(3.13)
Из выражения (3.13) следует, что напряжение Uд, приложенное к электродвигателю, уравновешивается суммой э. д. с. вращения Е и падения напряжения на обмотке электродвигателя  . Выражение (3.13) называют уравнением равновесия напряжений в цепи электродвигателя.
. Выражение (3.13) называют уравнением равновесия напряжений в цепи электродвигателя.
Для того чтобы преобразование электрической энергии в механическую было наиболее полным, необходимо иметь относительно малое со противление обмоток электродвигателя  . С этой целью обмотки изготовляют из проводников возможно большего сечения. У тяговых электродвигателей мощностью свыше 400 кВт падение напряжения на обмотках обычно составляет около 4 % приложенного напряжения Uд, а остальные 96% приходятся на э. д. с. вращения. Таким образом,
. С этой целью обмотки изготовляют из проводников возможно большего сечения. У тяговых электродвигателей мощностью свыше 400 кВт падение напряжения на обмотках обычно составляет около 4 % приложенного напряжения Uд, а остальные 96% приходятся на э. д. с. вращения. Таким образом,  .
.
Формулу для определения угловой скорости якоря электродвигателя можно получить из выражений (3.11) и (3.13):
 (3.14)
(3.14)
Из формулы (3.14) видно, что угловая скорость возрастает при увеличении напряжения Uд, подведенного к электродвигателю, а также при уменьшении сопротивления в цепи электродвигателя и магнитного потока Ф. Частота вращения вала электродвигателя, об/мин, рассчитывается по формуле
 (3.15)
(3.15)
Номинальный режим работы электродвигателя. Этот режим определяется нагреванием электродвигателя в процессе работы под действием потерь энергии в обмотках , а также механических и магнитных потерь, возникающих при вращении якоря. При повышении температуры, обмоток электродвигателя срок службы их изоляции значительно сокращается. Предельно допустимая температура обмоток для различных классов изоляции лежит в пределах 160—220 °С.
Для каждого типа электродвигателя завод-изготовитель устанавливает номинальный режим работы, при котором обмотки двигателя в течение 1 ч нагреваются до предельно допустимой температуры. Напряжение на электродвигателе, его мощность, потребляемый ток и частота вращения, соответствующие номинальному режиму, называют номинальными и обозначают в индексе буквой Н:  ,
, ,
, ,
, . Обычно эти величины указывают на фирменном щитке электродвигателя.
. Обычно эти величины указывают на фирменном щитке электродвигателя.
Режим работы электродвигателя, когда он развивает мощность больше номинальной, называется перегрузкой. При перегрузке двигатель интенсивно нагревается и может выйти из строя. Допустимые значение и длительность перегрузки устанавливает завод-изготовитель. Обычно допускается 1,5-кратная перегрузка электродвигателя в течение нескольких минут.
Электромеханические характеристики электродвигателя. Эти характеристики представляют собой зависимости вращающего момента М и угловой скорости якоря ω от тока , потребляемого электродвигателем. Характер зависимостей М( ) и ω(), определяемый формулами (3.6) и (3.14), обусловлен способом питания обмоток возбуждения электродвигателя. При независимом возбуждении обмотка полюсов получает питание от отдельного источника постоянного тока (рис. 2.12, а).
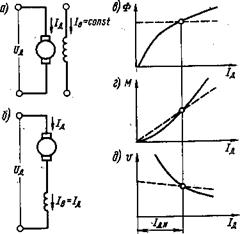
Рис. 3.4. Принципиальные схемы (а, б) и электромеханические характеристики (в, г, д) электродвигателя постоянного тока при независимом (штриховые линии) и последовательном (сплошные линии) возбуждении.
Поскольку ток возбуждения Iв не зависит от тока якоря Iд, то магнитный поток полюсов электродвигателя Ф можно считать практически постоянным (рис. 3.4, в). Тогда вращающий момент электродвигателя согласно формуле (3.6) прямо пропорционален току (рис. 3.4, г). Частота вращения электродвигателя определяется формулой (3.14), в которой знаменатель постоянен, а числитель с ростом тока уменьшается незначительно. Поэтому частота вращения электродвигателя независимого возбуждения несколько снижается с увеличением тока (рис. 3.4, д).
При последовательном возбуждении обмотки якоря и полюсов включены последовательно в общую цепь (рис. 3.4, б) и ток возбуждения равен току якоря (Iв = Iд). Этот способ возбуждения называют также сериесным (от английского Series — ряд, последовательность). При последовательном возбуждении магнитный поток полюсов Ф зависит от тока и определяется магнитными свойствами стали, из которой изготовлен остов двигателя, сердечники якоря и полюсов. Зависимость Ф() подобна кривой намагничивания ферромагнитных материалов (см. рис. 3.4, в). При сравнительно небольших значениях тока возбуждения магнитный поток Ф прямо пропорционален . При дальнейшем увеличении тока наступает магнитное насыщение стали и рост магнитного потока замедляется.
При ненасыщенной системе электродвигателя возрастание тока приводит к пропорциональному увеличению магнитного потока. В результате вращающий момент в соответствии с формулой (3.6) возрастает пропорционально квадрату тока. При насыщении магнитной системы электродвигателя увеличение тока приводит к очень незначительному возрастанию магнитного потока. Поэтому при больших токах зависимость вращающего момента от тока очень близка к линейной (см. рис. 3.4, г).
Частота вращения электродвигателя с последовательным возбуждением заметно уменьшается с ростом тока якоря (см. рис. 3.4, д) главным образом вследствие увеличения магнитного потока Ф, входящего в знаменатель формулы (3.14). Числитель формулы (3.14) с увеличением тока якоря уменьшается весьма незначительно.
Чтобы рассчитать ток, потребляемый электродвигателем, подставим значение э. д. с. вращения (формула 3.11) в уравнение равновесия напряжений (формула 3.13). Получим
Для электродвигателя с независимым возбуждением магнитный поток Ф остается постоянным при изменении тока якоря. Найдем отсюда ток
 (3.16)
(3.16)
Из формулы (3.16) видно, что с уменьшением частоты вращения якоря ток электродвигателя возрастает. Тяговые электродвигатели имеют малое сопротивление обмоток. Поэтому при подключении электродвигателя с неподвижным якорем ( = 0) к номинальному напряжению ток достигает значения , которое более чем в 10 раз превышает номинальный ток. Такой режим работы недопустим. Поэтому при пуске электродвигателя нужно принимать меры для ограничения пускового тока.
, которое более чем в 10 раз превышает номинальный ток. Такой режим работы недопустим. Поэтому при пуске электродвигателя нужно принимать меры для ограничения пускового тока.
Электродвигатель последовательного возбуждения при перегрузке развивает больший вращающий момент (см. рис. 3.4, г, д), а при малых нагрузках — более высокую скорость движения, чем электродвигатель с независимым возбуждением. Имеются и некоторые другие преимущества электродвигателей последовательного возбуждения, благодаря чему они получили широкое применение на современном электрическом подвижном составе. независимое возбуждение тяговых электродвигателей применяют только в особых условиях, например в режиме электрического торможения.
|
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 1304; Нарушение авторских прав?; Мы поможем в написании вашей работы!