КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вибропогружатели
|
|
|
|
Вибрационный метод погружения свай в нашей стране разработан Д.Д.Барканом в 1934 году. В1948 году проведены первые опыты по погружению свай и шпунта. В 50-х годах этот способ стал широко применяться в стране при строительстве Волгоградской ГЭС, Куйбышевской ГЭС. В это время началась разработка теории виброударного погружения.
Назначение. Вибрационный метод применяется при погружении свай в песчаных и водонасыщенных грунтах, не содержащие крупных твердых включений; вдавливание и вибровдавливание, при погружении коротких (до 6 м) свай в рыхлых и плотных грунтахВибропогружатели представляют собой механизмы, передающие погружаемым (или извлекаемым) элементам колебания определенной частоты, амплитуды и направления, в результате которых обеспечивается их погружение (извлечение). Работа вибропогружателей основана на резком снижении коэффициента трения между грунтом и поверхностью погружаемого (извлекаемого) элемента под действием возникающих колебаний.
 |
Рис. 3.37. Вибропогружатель на экскаваторе.
Вибропогружатель применяется при строительстве объектов на слабых грунтах, на берегах рек, морей. Вибропогружатель незаменим при строительстве различных гидротехнических сооружений – причалов пристаней, портов, мостов, укрепления береговой линии и т.п.
Классификация вибропогружателей. Все вибропогружатели делятся по принципу работы на две группы машин:
- вибромолота;
- вибропогружатели;
- квазистатическое погружение.
По спектру рабочих частот:
- одночастотные;
- поличастотные.
По конструктивному исполнению:
- одномассные;
- двухмассные;
- с подрессоренной пригрузкой.
По характеру колебаний:
- с круговыми колебаниями в вертикальной плоскости;
- с вертикальными направленными колебаниями;
- сложные колебания- вертикальными плюс вращательными и т.п.
По рабочей частоте:
- низкочастотные (рабочая частота подбирается равной собственной частоте системы свая-грунт, в пределах 20 – 50 Гц);
- нормальной частоты;
- высокочастотные (рабочая частота подбирается равной собственной частоте продольных колебаний сваи).
По назначению:
- для погружения труб и шпунта;
- для погружения железобетонных свай;
- для свай-оболочек (пустотелый цилиндр диаметром до 6 м, внутренняя полость оболочки может заливаться бетоном). Схема классификации вибропогружателей представлена на рис.3.34.
Как видно из этой схемы классификация вибропогружателей производится по назначению и области применения, по типу привода и по виду передаваемых колебаний.
Так по рабочим частотам различают низкочастотные (300... 500 кол/мин) и высокочастотные (700... 1500 кол/мин) погружатели. Низкочастотные погружатели применяются для погружения элементов значительной массы и габаритов с большим лобовым сопротивлением (железобетонные оболочки); высокочастотные — для погружения элементов небольшой массы с малым лобовым сопротивлением (металлический шпунт, трубы, балки).
По типу привода вибропогружатели классифицируются на трансмиссионные, когда между двигателем и небалансными валами имеется передаточный механизм, и бестрансмиссионные, когда валы электродвигателей являются небалансными. Наиболее удобными, надежными и долговечными являются бестрансмиссионные машины, в которых используются электродвигатели с короткозамкнутым ротором. Они работают без ремонта более 600 машиночасов, в то время как трансмиссионные только 100 машиночасов.
По виду передаваемых колебаний различают вибропогружатели с колебаниями, направленными вдоль оси погружаемого элемента, и вибропогружатели комбинированного действия, т. е. с винтовыми колебаниями, представляющими собой сочетание круговых колебаний в горизонтальной плоскости и вертикальных колебаний. Комбинированные вибропогружатели могут быть использованы только для погружения элементов цилиндрической формы типа свай-оболочек.
В последнее время появился принципиально новый отечественный вибропогружатель, работающий по принципу квазистатического вдавливания. Этот тип вибропогружателя имеет существенные преимущества, поскольку он сочетает в себе как эффект вибрации, так и достоинства чистого вдавливания свай.
Особенности работы этого типа погружателей представлен в следующих разделах.
Рис.3.38. Схема классификации вибропогружателей.
Конструктция вибропогружателей. Преимуществами вибропогружателей перед свайными молотами являются повышенные скорости погружения, простота конструкции, удобство в управлении, бесшумность. Материал погружаемого под действием вибрации элемента не подвергается ударным нагрузкам и испытывает незначительные перенапряжения, что позволяет погружать в грунт тонкостенные железобетонные оболочки на большую глубину. Вибропогружателями можно заглублять сваи вблизи существующих сооружений, не опасаясь нарушить их целостность, так как окружающий грунт колеблется при этом незначительно. Главным недостатком вибропогружателей является невозможность применения их в связных и плотных маловлажных грунтах.
Вибропогружатели выполняют по двум основным конструктивным схемам: с жесткой и упругой связью между электродвигателем и вибрирующей массой. В первом случае это одномассные, а в другом двухмассные вибропогружатели.
Пример конструкции одномассных погружателей представлен на рис. 3.39, а) и б). Где вариант а) представляет собой одномассный вибропогружатель с одним вибратором направленного действия, а вариант б) – с двумя вибраторами направленного действия. Первый вариант состоит из приводного электродвигателя 1, привода вращения небалансных валов, вибровозбудителя 3 и наголовника 4 с механическими или гидравлическими зажимами для жесткого соединения механизма с погружаемым (извлекаемым) элементом.
Вибровозбудитель представляет собой вибратор направленного действия с четным количеством горизонтально расположенных валов с небалансами - два, четыре или шесть, получающих вращение от электродвигателя через ременную (вариант Рис.3.39,а)), цепную или шестеренчатую (вариант Рис.3.39, б) передачу. При вращении небалансных валов возникает суммарная центробежная сила (вынуждающая сила), развиваемая небалансами, достигающая наибольшего значения в вертикальной плоскости. В этом случае она направлена вдоль оси погружаемого (извлекаемого) элемента и передается на него через наголовник сваи.
а) б)
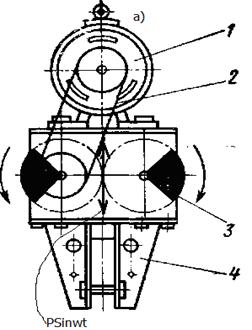 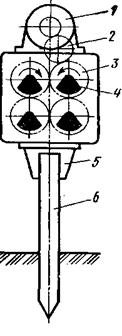 Рис. 3.39. Одномассные вибраторы с одним – а) и двумя вибраторами направленного действия – б).
В варианте, представленном на рис. 3.39,б), погружатель состоит из четырехвального вибратора направленного действия, приводного электродвигателя 1 с фазовым ротором и наголовника 5 со сваей 6, жестко соединенных между собой. Движение от электродвигателя передается через промежуточную шестерню 2 и систему синхронизирующих цилиндрических шестерен 3 на небалансные валы 4, вращающиеся синхронно и синфазно.
В комплект погружателя входит пульт управления, предназначенный для пуска и остановки электродвигателя, регулирования частоты вращения небалансных валов (частоты колебаний) и величины вынуждающей силы виброоргана. В конструкции могут быть предусмотрены пригрузочные плиты, жестко связанные с корпусом виброоргана.
Рассмотренные конструкции просты, но имеют ряд недостатков: с увеличением массы погружателя снижается амплитуда колебаний сваи; жесткая связь между виброорганом и электродвигателем снижает долговечность работы последнего или требует изготовления его виброустойчивым.. В связи с этим, в настоящее время эти конструктивные варианты используются в определенных геологических условиях, а конструкция подвергается модернизации. Например, бестрансмиссионный вибропогружатель представленный на рис.3.41 или вибропогружатель с гидравлическим приводом - на рис. 3.40.
Рис. 3.39. Одномассные вибраторы с одним – а) и двумя вибраторами направленного действия – б).
В варианте, представленном на рис. 3.39,б), погружатель состоит из четырехвального вибратора направленного действия, приводного электродвигателя 1 с фазовым ротором и наголовника 5 со сваей 6, жестко соединенных между собой. Движение от электродвигателя передается через промежуточную шестерню 2 и систему синхронизирующих цилиндрических шестерен 3 на небалансные валы 4, вращающиеся синхронно и синфазно.
В комплект погружателя входит пульт управления, предназначенный для пуска и остановки электродвигателя, регулирования частоты вращения небалансных валов (частоты колебаний) и величины вынуждающей силы виброоргана. В конструкции могут быть предусмотрены пригрузочные плиты, жестко связанные с корпусом виброоргана.
Рассмотренные конструкции просты, но имеют ряд недостатков: с увеличением массы погружателя снижается амплитуда колебаний сваи; жесткая связь между виброорганом и электродвигателем снижает долговечность работы последнего или требует изготовления его виброустойчивым.. В связи с этим, в настоящее время эти конструктивные варианты используются в определенных геологических условиях, а конструкция подвергается модернизации. Например, бестрансмиссионный вибропогружатель представленный на рис.3.41 или вибропогружатель с гидравлическим приводом - на рис. 3.40.
Рис.3.40. Вибропогружатель с гидравлическим приводом.
|


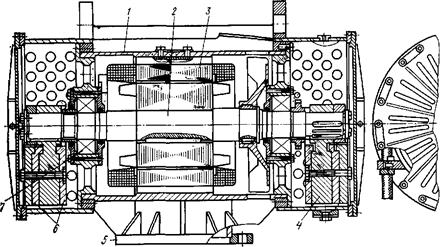
Рис. 3.41. Бестрансмиссионный вибропогружатель
Бестрансмиссионный вибропогружатель представляет собой конструкцию (Рис.3.40), где в стальной корпус 1 запрессованы статоры 3 пары двухскоростных асинхронных виброустойчивых электродвигателей. Короткозамкнутые роторы насажены на валы 2, а на консольных концах валов расположены основные небалансы 4. При необходимости увеличения амплитуды колебаний к ним крепятся дополнительные один-два небаланса 6. Небалансные валы вращаются в подшипниках 7. Вибропогружатель крепится к наголовнику с помощью фланца 5. Благодаря двухскоростным двигателям погружатель может работать в низкочастотном (485 кол/мин) и высокочастотном (975 кол/мин) режимах, что расширяет область применения машины.
Кроме рассмотренных одномассных вибраторов направленного действия, применяются вибропогружателя со сложным характкром колебаний. Они нашли широкое применение при погружении свай-оболочек большого диаметра.
 а)
а)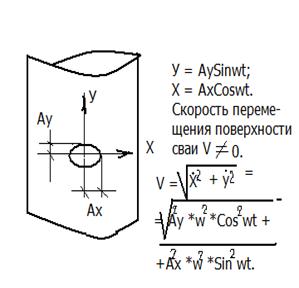 б)
б)
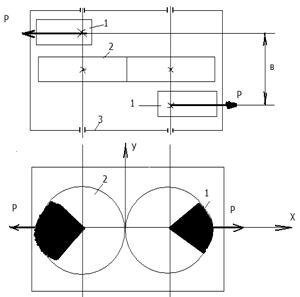
Рис. 3. 42. Конструктивная схема вибропогружателя с крутильными колебаниями.
Здесь вертикальные колебания передаваемые свае одновременно сочетаются с крутильными. Конструктивная схема и принцип работы такого вибропогружателя представлены на рис.3.42. Скорость точки поверхности сваи при этом в каждый момент времени не равна нулю и определяется в соответствии с рис.3.42,б).
Другие варианты конструктивных схем вибропогружателей, вызывающих сложные колебания, приведены на рис. 3.43. В первом случае (рис. 3.38,а) смешанные колебания возникают от синхронного вращения в разные стороны не-
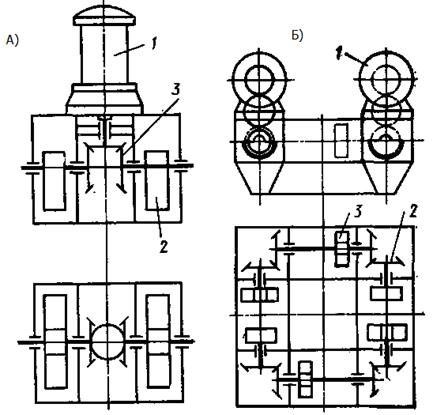
Рис. 3.38. Схемы вибропогружателей, возбуждающих комбинированные колебания
балансов 2, расположенных соосно. Вращение небалансов происходит от фланцевого электродвигателя 1 с вертикальным валом через коническую зубчатую передачу. Для мощных вибропогружателей применяется схема с четырьмя или большим количеством дебалансов 3 (рис. 3.38,б). Вращение дебалансов происходит от электродвигателей 1 и синхронизирующих зубчатых конических передач 2.
Вибропогружатель с подрессоренной пригрузкой. Конструктивная схема такого погружателя свай показана на рис. 3.39, а общий вид таких вибропогружателей представлен на рис.3.40. Здесь (рис. 3.39) двигатель 1 установлен на подрессоренной пригрузочной плите 4, оказывающей необходимое давление на погружаемый элемент. Крутящий момент от электродвигателя вибратору 2 передается через клиноременную передачу 5.
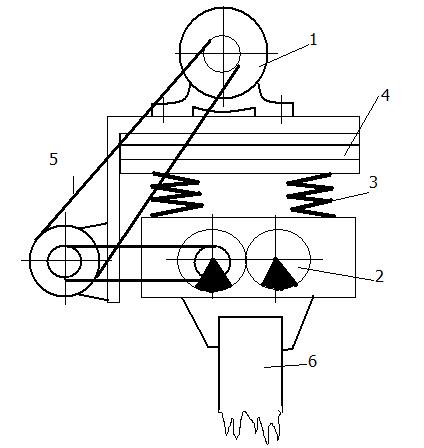
Рис. 3.39.Двухмассный вибропогружатель с подрессоренной пригрузкой.
1- электродвигатель; 2 – вибратор направленного действия; 3 – амортизаторы; 4 – дополнительный груз подрессоренной массы; 5 – ременной привод вибратора.
Наличие между двигателем и вибратором амортизирующих пружин малой жесткости 3 позволяет существенно уменьшить вредное влияние вибрации на электродвигатель. При этом, в процессе погружения, колебания совершают только свая и вибратор. При такой конструкции увеличение массы пригрузочных плит практически не влияет на амплитуду колебаний сваи. Меняя массу пригрузочных плит, можно получить оптимальный вибрационный режим для наиболее эффективного погружения сваи (шпунта).
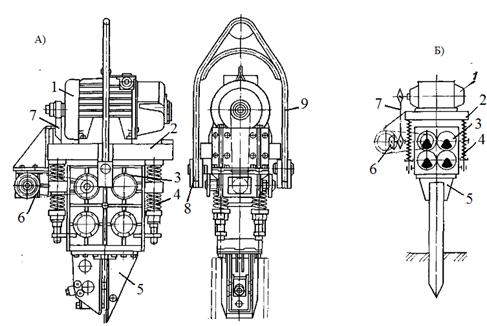
Рис. 3.40. Общий вид вибропогружателей с упругой связью между электродвигателем и четырех вальным вибратором.
Общий вид и схема четырех вального вибропогружателя с подрессоренным грузом представлена на рис. 3.40. Приводной электродвигатель 1 установлен на пригрузочной плите 2 и через амортизирующие пружины 4 связан с вибратором 3. Корпус которого жестко соединен с наголовником 5. Привод четырех вального вибратора осуществляется через вертикальную цепную передачу 7, конический редуктор 6 и систему синхронизирующих шестерен, установленных на небалансных валах. Шарнир 8 коромысла подвески 9 расположен вблизи от центра тяжести погружателя, что позволяет легко поворачивать его в горизонтальное положение для присоединения к свае.
Двух массные вибропогружатели с подрессоренным грузом имеют такие преимущества как
- увеличение долговечности работы двигателя до 1000 часов;
-возможность регулировать подрессоренную массу за счет дополнительных грузов, тем самым увеличить общее давление на сваю и расширить диапазон работы вибропогружателя;
- перераспределение общей нагрузки на сваю в подрессоренную часть, приводит к уменьшению колеблющейся массы и возможности снижения мощности приводного двигателя.
Преимущество этой конструктивной схемы перед ранее рассмотренными теряется в двух случаях. Первый случай, когда имеем тяжелый и мощный низкочастотный вибратор, не нуждающийся в дополнительном грузе и работающий в режиме сильных ударов торца сваи о грунт. И, в случае, когда имеется возможность пригрузить сваю от канатной лебедки копровой установки.
В настоящее время получают широкое распространение модульные вибропогружатели, вибровозбудитель которых собирается из отдельных двух вальных блоков (модулей). Количество модулей в вибровозбудителе зависит от условий и вида выполняемых свайных работ. Такие погружатели способны заменить несколько различных по конструкции обычных погружателей, работа которых ограничена в зависимости от вида погружаемого элемента и плотности грунта. Схема такого вибропогружателя приведена на рис. 3.41,а. Он состоит из амортизатора 3, вибровозбудителя 4, блоков горизонтальной 5 и вертикальной 6 синхронизации, гидравлического наголовника 7, насосной станции 2 и пульта управления 1.
Модуль (рис. 3.41,б) состоит из двух электродвигателей 10, смонтированных в стальном корпусе 8. Вращение электродвигателей происходит в противоположные стороны и синхронизируется горизонтально расположенной зубчатой передачей 9. На валах 12 электродвигателей установлены небалансы 11, вращающиеся синхронно-синфазно. Погружатели состоят из двух, трех или четырех модулей, смонтированных один под другим или попарно, соединенных промежуточной рамой.
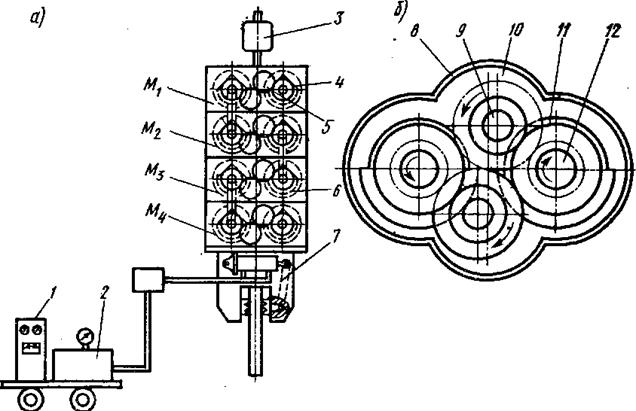
Рис. 3.41. Модульный вибропогружатель
Верхний и нижний модули синхронизируются с помощью вертикально расположенной регулируемой цепной передачи. Амортизатор обеспечивает гашение передаваемых на грузоподъемный механизм (лебедка, копер) колебаний. При изменении числа модулей в вибровозбудителе погружателя необходимо изменять число амортизационных пружин (или их параметры).
Рабочий процесс одно массных вибропогружателей. Процесс погружения в грунт элементов с помощью низкочастотных погружателей можно представить в виде периодического отрыва торца погружаемого элемента от грунта под влиянием большой амплитуды колебаний «А»(А = 20... 35 мм) и последующего удара торца элемента по грунту.
Высокочастотные погружатели обеспечивают погружение элементов под действием массы погружателя и сваи.
В процессе погружения свая преодолевает два вида сопротивлений:
- лобовое, распределенное по площади поперечного сечения сваи;
- боковое, связанное с трением грунта по боковым поверхностям сваи.
Для бетонных и ж/бетонных свай весомость этих составляющих сопротивлений вдавливанию равнозначна. Для шпунта и тонкостенных свай-оболочек большого диаметра главные сопротивления погружению составляет боковая сила трения. В процессе вибрирования сваи, в местах ее контакта с грунтом происходят тиксотропные изменения его, приводящие к резкому снижению вязкости и коэффициента трения. Таким образом, вибрация изменяет свойства грунтов, а погружение сваи происходит за счет собственного веса сваи и дополнительной пригрузки. При этом скорость погружения сваи должна быть согласована с параметрами вибропогружателя, такими как амплитуда колебаний сваи (А кол), частота колебаний (ωкол), а также величина призруза на сваю (q).
Анализируя графики на рис 3.42, показывающие влияние на скорость погружение сваи различных параметров вибропогружателя, можно отметить следующее.
1. При постоянной угловой скорости вала вибратора (W=Const), погружение сваи происходит не сразу, а по достижении какой-то определенной величины амплитуды колебаний. Величина этой амплитуды называется амплитудой срыва – Аср. До амплитуды срыва происходят упругие колебания сваи с грунтом без погружения сваи. После преодоления величины амплитуды срыва скорость погружения сваи возрастает по закону близкому к экспоненте. На первом участке этой кривой нарастание скорости погружения сваи происходит интенсивно, а затем интенсивность нарастания скорости падает.
Этот момент изменения интенсивности нарастания скорости погружения сваи соответствует наиболее целесообразной, эффективной амплитуде колебаний сваи для данных условий- Аэфф. Дальнейшее увеличение амплитуды колебаний сваи нецелесообразно из-за экономических соображений.
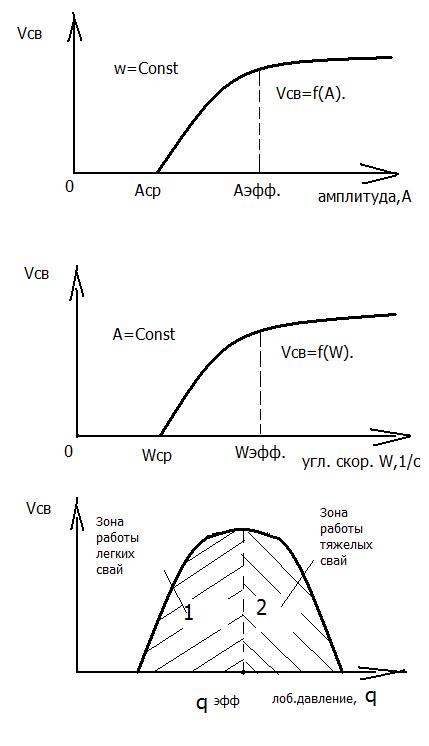
Рис.3.42. Влияние амплитуды (А), частоты колебаний (W) и удельного лобового давления (q) на скорость погружения сваи.
2. Аналогичная закономерность изменения скорости погружения сваи наблюдается от изменения угловой скорости вибратора-W, при постоянной амплитуде колебаний (A=Const). Здесь также, до определенной величины угловой скорости вала вибратора – Wср, погружения сваи нет. Далее идет интенсивное нарастание скорости погружения до эффективного значения угловой скорости вращения вала вибратора-Wэфф, после чего скорость погружения сваи замедляется.
Следует заметить, что все погружатели имеют ускорение сваи в процессе вдавливания порядка 9-10g. Но, это условие справедливо только при А˃ Аср; W˃Wср. Сравнивая рассмотренные зависимости можно установить, что ускорение сваи должно соответствовать значениям порядка Аэфф*W2эфф = (10-12) g. При этом условии процесс погружения сваи идет хорошо.
4. Влияние лобового удельного давления (q) на скорость погружения сваи показан на рис.3.42, график третий. Под удельным лобовым давлением сваи понимается отношение:
q = (mc +mв) g /Fлоб, где mв – масса вибропогружателя со сваей; mс – масса пригруза; Fлоб – площадь сечения сваи.
Эта зависимость, построенная при постоянной угловой скорости вала вибратора и постоянной амплитуде колебаний, имеет максимум. Точка этого максимума, соответственно и скорости погружения сваи, соответствует оптимальному значению удельного лобового давления - qэф. Область этой кривой расположенная до максимума - считается областью работы легких свай. Область кривой, расположенная за максимумом относится к области работы тяжелых свай. Это разделение условное, четкой границы нет.
Использование вибропогружателей в благоприятных грунтовых условиях позволяет повысить производительность труда в 2,5... 3 раза и снизить стоимость свайных работ в 1,5... 2 раза по сравнению с вариантами применения паровоздушных и дизельных молотов.
Динамическая модель вибропогружателя может быть представленадвух массной моделью. При этом следует отметить, что эта расчетная модель зависит от принятых условий работы вибропогружателя, которые должны быть оговорены. Так, для режима работы вибропогружателя в зарезонансной зоне, при установившемся режиме работы, динамическая модель может быть представлена так, как показано на рис. 3.43.
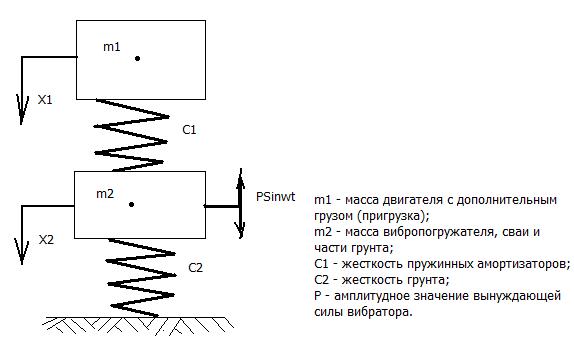
Рис. 3.43. Динамическая модель вибропогружателя.
Уравнения движения этой системы можно записать как:
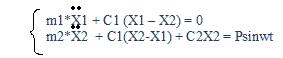
(3.1)
При работе вибропогружателя в дорезонансной зоне необходимо учитывать ещё и вязкость системы.
Амплитудно-частотная характеристика такой двух массной системы (3.1) представлена на рис. 3.44.
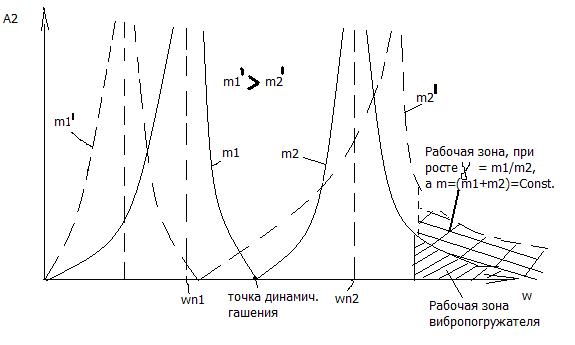
Рис.3.44. Амплитудно-частотная характеристика и ее изменение от соотношения масс γ = m1/m2, где m1 – подрессоренная масса. Здесь wn1 – собственная частота колебаний подрессоренной массы; wn2 – собственная частота колебаний сваи с вибратором.
Из уравнений (3.1) можно найти амплитуды колебаний для верхней (подрессоренной - m1) и нижней (вибратор со сваей - m2) масс.
В процессе работы, при постоянной общей массе равной m = m1 + m2 = q*F/g = Const, целесообразно перераспределять ее так, чтобы все лишнее из m2 перемещать в m1, в подрессоренную часть. В этом случае улучшается режим работы вибратора, растет амплитуда колебаний вибратора со сваей в рабочей зоне. Это приводит к изменению амплитудно-частотной характеристики, что и проиллюстрировано графически на рис. 3.44. При этом, когда m1˃ m2 график представлен пунктирной линией.
Выбор основных параметров свайных погружателей. К основным параметрам вибропогружателя относятся: мощность двигателя вибратора; амплитуда колебаний сваи, частота колебаний вибратора, величина вынуждающей силы, жесткость амортизаторов.
1. Главным параметром погружателей является мощность установленных электродвигателей. Мощность двигателей определяется двумя составляющими – это мощность необходимая для определения сопротивлений трения в подшипниках и мощность необходимая для поддержания колебаний.
2. Амплитуда колебаний должна быть больше амплитуды колебаний срыва – Асв ˃ Аср. При этом Асв = (4-5)Аср. Амплитуда срыва определяется пробным погружением сваи. Амплитуда колебаний вибросистемы «погружатель — свая» после начала работы погружателя определяется зависимостью А= Мс*е / Мс*х, где Мс*е - кинетический момент небалансов; Мс — суммарная масса колеблющейся конструкции (система «погружатель — наголовник — свая»); (х — коэффициент пропорциональности (в начале погружения (х= 1... 1,15, в конце погружения сваи (х=0,4... 0,7).
3. Частота колебаний (w) также должна быть больше частоты колебаний срыва, т.е. w ˃ wср. При этом необходимо проверить, чтобы величина ускорений колебания сваи находилась в рекомендуемых пределах: Аэфф*W2эфф =(10-12)g.
4. Кроме того, погружатели характеризуются вынуждающей силой, статическим моментом небалансов, амплитудой и частотой колебаний. Величина вынуждающей силы (кН) - Р = Мс*е*ω2, где Мс - суммарная масса небалансов, т; е - эксцентриситет небалансов, м; ω - угловая частота вращения небалансных валов. Вынуждающая сила должна быть больше усилия необходимого для срыва сваи Р˃Рср. Для массивных свай Рср = qср*Fлоб. Fлоб – лобовая поверхность сваи. Или из практики Р˃ро*L; где ро – удельная сила на единицу длины сваи; L – длина сваи.
Для шпунта и тонкостенных изделий Рср =S*Lпогр*τср; где S – периметр сваи; Lпогр – длина участка погружения сваи; τср – касательные напряжения в момент срыва сваи, τср = (3000-6000)[Н/м2].
5. Жесткость пружинных амортизаторов «с» определяется из условия, чтобы собственная частота подрессоренной массы не попала в резонанс. При этом частота собственных колебаний, определяемая как Wn1= √͞͞c1͞/m͞1, должна быть много меньше вынужденной частоте колебаний вибратора - W =πn/30. Таким образом при работе погружателя в зарезонансной зоне должно выполняться условие: Wn1≈ √͞͞c1͞/m͞1<< W =πn/30.
В теоретическом исследовании процессов вибрационного погружения часто движение сваи рассматривается с периодом, равным времени одного или несколько оборотов небалансов. При этом погружение сваи представляется в виде следующих друг за другом этапов движения, характеризующихся определенной системой сил действующих на неё. Поэтапное рассмотрение движения сваи за период обусловливается принятой расчетной схемой решения задачи, которая отражается алгоритмом. Алгоритм задает условия окончания того или иного этапа движения и переход к другой совокупности, действующей системе сил и условия завершения цикла.
В качестве примера можно привести расчетную схему вибрационного погружения, при чисто пластической модели грунта [Цейтл и др], представленной на рис. 3.45. Здесь приняты следующие допущения:
- свая представляет собой абсолютно твердое тело, с силой тяжести сваи равной-Q;
- окружающий сваю грунт неподвижен;
- между боковыми поверхностями сваи и грунтом действует сила сухого трения-F;
-лобовое сопротивление грунта при внедрении в него сваи в течение рассматриваемого периода постоянно- R;
- вибратор действует на сваю с силой Р = РоSinwt.
С учетом сказанного процесс погружения сваи можно представить в виде кусочно-линейной системы с нижеследующими этапами.
1. Этап движения сваи вверх:
moẌ = - PоSin(wt+α) + Q + F; где α – угол сдвига фаз между векторами вынуждающей силы и перемещения вибратора. (3.2)
при t = 0, X=Ẋ = 0; при t = t1, Ẋ =0, X= X1.
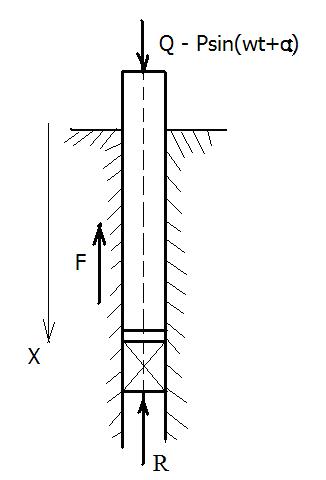
Рис. 3.45. Расчетная схема вибрационного погружения при продольных колебаниях сваи.
В крайнем верхнем положении сваи возможна ее стоянка, если сумма действующих на нее сил будет отрицательная:
- PоSin(wt1+α) + Q - F< 0. (3.3)
Если остановка сваи в верхнем положении есть, то движение сваи вниз начнется в какой-то момент времени - t2:
- PоSin(wt2+α) + Q – F= 0. (3.4)
Если стоянки сваи нет, то движение её начнется в момент времени t1. При этом начинается этап движения сваи вниз до момента ее контакта с грунтом, который представлен грунтовой пробкой:
moẌ = - PоSin(wt+α) + Q - F; (3.5)
при t = t᾿, X=X1, Ẋ = 0; при t = t3, X= 0, Ẋ = Ẋ3.
В (3.5) имеем: t᾿ = t1, при отсутствии стоянки и t᾿ = t2, если выполняется условие (3.3). Дальнейшее движение сваи вниз (погружение сваи) – это этап продавливания пробки (чисто пластическая деформация):
moẌ = - PоSin(wt+α) + Q – F - R; (3.6)
при t = t3, X= 0, Ẋ = Ẋ3,
при t = t4< 2π/ω, х=Х, Ẋ = 0.
В интервале времени 2π/ω - t4 происходит стоянка системы до начала следующего цикла, когда величина проекции на ось х амплитудного значения вынуждающей силы не станет достаточной для подъема сваи. Это условие определяется уравнением (3.7):
PоSinα = Q + F. (3.7)
Из этого условия следует, что фазовый угол равен – α =arcSin[(Q + F)/Pо]. В работе[Цейтл и др.], рассматриваются и другие модели сопротивления грунта вдавливанию, а также при других схемах приложения внешней нагрузки на сваю: упруго-пластической системе сопротивления грунта и погружение сваи при продольно-вращательных колебаниях.
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 7827; Нарушение авторских прав?; Мы поможем в написании вашей работы!