КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вибромолоты
|
|
|
|
Назначение. Вибромолоты используются для погружения свай, шпунта, свай-оболочек и др. Интенсивность и эффективность этого метода погружения выше, чем у вибропогружателей, поскольку работают они в виброударном режиме. Это оборудование часто навешивают на экскаваторы.
Вибромолот — это вибрационная машина, передающая свае одновременно колебательные и ударные импульсы. Такое воздействие на погружаемый элемент позволяет применять вибромолоты для погружения металлических свай, труб и шпунта в рыхлые и водонасыщенные средней плотности пески, а также в связные грунты текучей и текучепластичной консистенции. Вибромолоты позволяют погружать сваи даже в мерзлые грунты.
Конструктивная схема вибромолота. Вибромолот (рис. 3.46) состоит из ударной части, включающей в себя двухвальный безтрансмиссионный вибровозбудитель направленных колебаний 1 с ударником 5 и наголовник 6 с наковальней 4, соединенных между собой рабочими пружинами 3. Наголовники могут соединяться с погружаемым элементом жестко или устанавливаться на него свободно без закрепления. Вибровозбудитель включает в себя два электродвигателя, на параллельных валах, на которых закреплены небалансы 2, вращающиеся синхронно-синфазно. При вращении небалансов ударник 5 колеблющегося вибровозбудителя наносит частые (до 1440 в минуту) удары по наковальне 4, соединенной с погружаемым элементом. Параметры вибромолотов аналогичны ранее рассмотренным вибропогружателям.
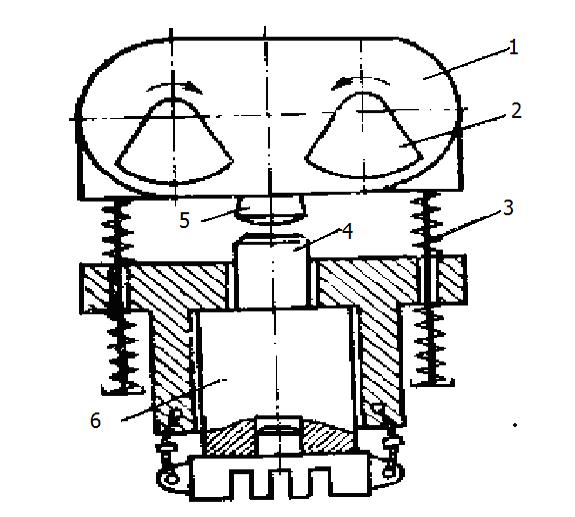
Рис.3.46. Конструктивная схема вибромолота направленного действия.
Классификация вибромолотов производится по виду применяемого привода, по связи двигателя с вибровозбудителем и по наличию упругой связи между вибровозбудителем и погружаемым элементом. Классификационная схема вибромолотов представлена на рис 3.47
Существует несколько принципиальных схем вибромолотов (рис. 3.48, а),б),в),г)). На рис. 3.48, а) представлен простейший вариант беспружинного молота, свободно лежащего на свае. Здесь ударная часть подбрасывается вынуждающей силой и, падая, передает ударные импульсы головке сваи. Достоинством данной схемы является простота конструкции, недостатком — низкая эффективность работы и невозможность регулирования параметров удара.
Схемы пружинных молотов с положительным (или нулевым) зазором приведены на рис. 3.48,б),в) и г). Такие вибромолоты наиболее распространены, так как имеют несколько режимов, в которых может работать машина.
На рис. 3.48,б),в) показаны схемы двухвальных пружинных вибромолотов, а на рис. 3.48,г) – вибромолот с одновальным вибратором ненаправленного действия. Преимуществами последнего варианта конструктивной схемы вибромолота являются малая масса и простота конструкции машины, недостатками — значительные потери энергии при ударе и невысокая эффективность работы.

Рис.3.47 Схема классификации вибромолотов.
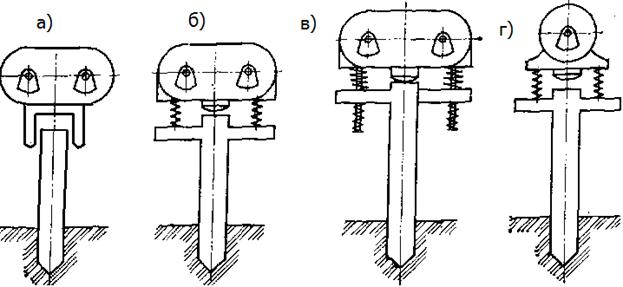
Рис.3.48. Различные конструктивные варианты вибромолотов.
Эффективность пружинных молотов зависит от их настройки и режима работы. В зависимости от жесткости пружин, параметров вибровозбудителя, характеристики грунтов вибромолоты могут работать в ударном и безударном режимах. Преимуществами таких схем являются меньшая масса вибромолота, а также незначительное влияние характеристики грунта на режим работы машины.
Особенностями этих конструктивных вариантов вибромолотов является наличие зазора «S» между вибрирующей и невибрирующей массами и возможность регулировать его.
Кроме того, для повышения эффективности работы вибромолотов увеличивают значение сил, статически действующих в направлении погружения путем введения пригрузочных плит, масса которых определяется видом погружаемого элемента и характеристикой грунта.
Динамическая модель вибромолота, показана на рис. 3.49.
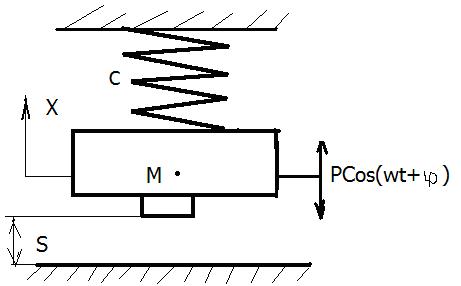
Рис.3.49. Динамическая модель вибромолота.
В динамической модели имеем: М – масса подвижной части; PCos (ɷt+φ) – вынуждающая сила вибратора; С – жесткость амортизаторов; S – зазор между вибрирующей и невибрирующей массами; Х – перемещение. Ограничителем ударной части является свая, она в момент удара считается неподвижной. Рассматриваются только вертикальные перемещения:
1.За начало отсчета времени принят момент сразу после удара. В момент удара скорость мгновенно меняет направление.
2.За начало отсчета перемещения принято положение вибропогружателя висящего на растянутой пружине (за счет собственного веса).
В процессе работы вибромолота подвижная часть ударяется об неподвижный ограничитель. Движение подвижной части происходит по закону:
РCos (wt + φ), где φ – начальный угол поворота небалансов в момент удара относительно направления движения ударной массы.
Удар происходит мгновенно, время удара равно нулю – tуд = 0. Удар характеризуется коэффициентом восстановления скорости при ударе – R< 1. Пружины считаем идеальными, с линейной характеристикой. Из всех возможных типов движения рассматриваем режим – один удар за один оборот вала.
В начальный момент времени, при t = 0, величина зазора «S» может быть отрицательной (имеется зазор), положительной (зазора нет, пружина поджата) или равной нулю. При этом существует три режима работы вибромолота:
1). Если |- S| ˃ А, где А амплитуда колебаний, то молот колеблется не достигая неподвижной части - удара нет.
2). Если |+ S| ˃ А, то молот работает как вибропогружатель, без удара.
3). Если |- S|< А˃ |+ S| - погружатель работает в режиме вибромолота.
С учетом этих замечаний, уравнение движения подвижной части между двумя ударами запишем как:
M*Ẍ + C*X = Р*Cos (wt + φ).
Решение этого уравнения ищем в виде:
Х = а1* Cos (wпt + α) + а2* Cos (wt + φ). (3.8)
Здесь первое слагаемое представляет собой свободные колебания массы «М» с частотой wп; α – угол сдвига собственных колебаний; а1 – амплитуда собственных колебаний.
wп= √͞С͞/͞М.
Второе слагаемое – это вынужденные колебания системы с частотой w = π*n/30; а2 – амплитуда вынужденных колебаний.
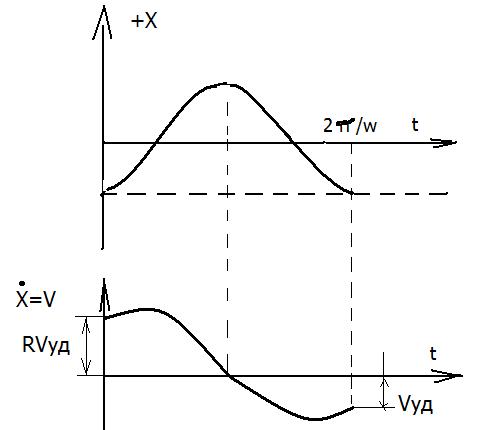
Рис.3.50. График движения и скорости ударной массы вибромолота.
Для определения неизвестных а1, α, φ, Vуд, необходимо иметь четыре начальных условий:
При t = 0; Х = ± S; Ẋ= R*Vуд.
При t = 2π/w; Х = ± S; Ẋ= - Vуд.
Беря первую производную по времени от уравнения (3.8), получаем уравнение для Ẋ- скорости удара. Теперь в формулы для Х и Ẋ подставляем начальные условия. Таким образом, получаем четыре уравнения с неизвестными а1, α, φ, Vуд. Решая эти уравнения, находим вышеназванные неизвестные. Поскольку эффективность погружения сваи зависит главным образом от скорости удара (Vуд), то для неё, в результате решения, получаем следующее выражение:
Vуд = Ф* А∞* w, (3.9)
где Ф – сложная математическая функция;
А∞ - амплитуда колебаний в отсутствии ограничителя, А∞ = mнеб*е/М; где mнеб*е масса небаланса на эксцентриситет.
Анализ уравнения (3.8) в графическом исполнении представлен рисунком 3.51. При этом следует отметить следующее:
1. Скорость удара должна быть вещественная величина.
2. Скорость удара должна быть положительная величина.
3. Величину скорости удара можно регулировать только величиной зазора. Поэтому зона устойчивости анализируется в координатах зазор-частота.
Следует отметить, что условия 1 и 2 могут выполняться только при некоторых значениях зазора и жесткости пружин. Поэтому не при всех значениях этих параметров существуют установившиеся периодические удары.
График на рис. 3.51 представлен в координатах зазор-частота, взятых в относительных единицах. При этом величина зазора отнесена к амплитуде А∞, в результате получаем безразмерную величину S/ А∞. Частота также представлена в относительных единицах безразмерным коэффициентом ε = Wn/W, где Wn – собственная частота колебаний ударной части; W – вынужденная частота колебаний.
График (рис.3.51) построен для различных значениях коэффициента восстановления скорости при ударе – R, причем R1˃ R2˃ R3. Здесь же отмечены зоны устойчивой работы вибромолота для различных условий его работы. Так зона 1 заштрихованная прямоугольной сеткой, соответствует устойчивой работе с одним ударом за одно колебание. Только в этой области возможны бὀльшие значения скорости удара. В зоне 2 заштрихованной косой сеткой также возможна устойчивая работа молота, но она зависит от начальных условий и ограничена величиной ε и величиной коэффициента восстановления скорости при ударе – R. Наиболее вероятные значения реакции грунта на удар соответствуют R=0,2 [Баркан].
В зонах 3 и 4 работа без удара, зазор больше амплитуды колебаний.
Необходимо отметить пунктирную кривую, которая соответствует оптимальному режиму работы вибромолота в зависимости от его начальных условий. Точки этой кривой соответствуют максимальной скорости удара - Vопт.
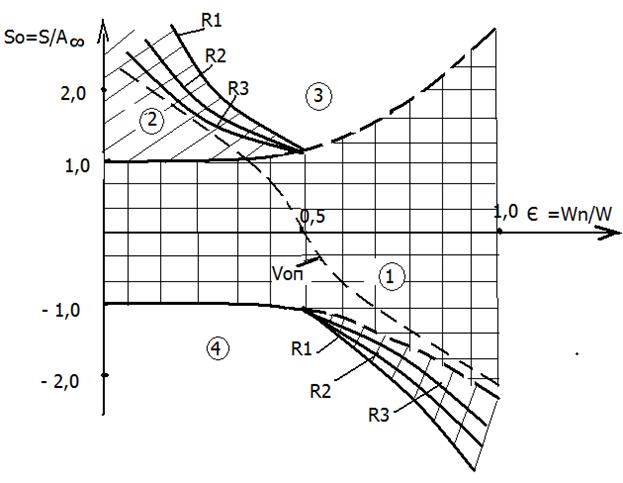
Рис.3.51. Зависимость относительного зазора от относительной частоты колебаний, устанавливающие области устойчивого одноударного режима работы вибромолота.
Для других начальных условий работы, например при других отношениях периода ударов к периоду вынуждающей силы К = 2, 3,4, рассмотрены в работе [Бар].
Общий вид вибромолота, выполненного по схеме рис.3.48 в) изображен на рис. 3.52, Вибромолот состоит из вибровозбудителя 8, наголовника 13, верхних 12 и нижних 16 рабочих пружин, скобы 7 с блоком 6 для подвески молота к тросу копровой установки, проставки 14, пульта управления 20. В корпусе 3 вибровозбудителя встроены два виброудароустойчивых электродвигателя 4 с параллельными горизонтально расположенными осями роторов 9. На концах валов закреплены небалансы 10.
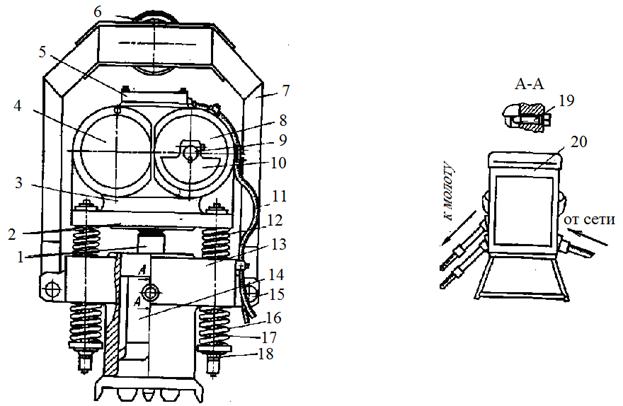
Рис. 3.52. Вибромолот с нулевым зазором.
В нижней части корпуса в коническом гнезде установлен боек 2. Натяжение рабочих пружин регулируется гайками 18, навинчиваемыми на штанги 17. Скоба крепится к наголовнику жестко с помощью осей 15. Проставка удерживается от выпадения из наголовника двумя стопорными болтами 19. Питание вибромолота производится от пульта управления с помощью кабеля 11 и токонесущих проводов через клеммную коробку 5. При работе электродвигателей вибровозбудитель получает вертикально направленные колебания, которые сопровождаются ударами бойка по наковальне 1 проставки. Наковальня закреплена в проставке в коническом гнезде.
Как отмечалось выше, вибрационные молоты могут работать при положительных, нулевых и отрицательных зазорах. Исследованиями установлено, что оптимальным является нулевой зазор, при котором режим работы молота не зависит от вида грунта, глубины погружения элемента и соотношения массы молота и погружаемого элемента. Положительные зазоры могут быть использованы в очень узких пределах, так как при зазорах, превышающих амплитуду вынужденных колебаний, возможен переход на безударные колебания.
Отрицательные зазоры могут использоваться в широких пределах, однако при этом режим работы молота весьма чувствителен к массе погружаемого элемента, глубине его погружения и виду грунта и поэтому требует частой перенастройки. Вибромолоты работают в комплекте с копровой установкой или самоходным краном соответствующей грузоподъемности.
Расчет вибромолотов. Расчет включает в себя определение энергии удара (Дж), жесткости рабочих пружин (Н/м), вынуждающей силы небалансов (Н), размаха колебаний машины (м), мощности электродвигателей (кВт), геометрических размеров небаланса (м).
1. Масса ударной части М = М св*α, где Мсв – масса погружаемой сваи. Коэффициент α = 0,5 – 1,0; Для легких свай α = 1,0; для тяжелых – α = 0,5.
2. Коэффициент восстановления скорости при ударе R также зависит от типа сваи. При забивке легких свай – R = 0. При забивки тяжелых стальных и железобетонных R =0,2.
3. Выбор частоты колебаний. Число оборотов двигателя составляет 400 – 700 кол/мин. При этом обеспечивается режим работы вибромолота - один удар за одно колебание.
4. Выбор зазора. Идеальный случай, когда имеем Sо = 0 и S = 0. Тогда желательно иметь ε = Wn/W = 0,5.
5. Жесткость пружин. Она определяется из условия, что ε = Wn/W = 0,5. Где W = πn/30 = 2π*λ, где λ – частота колебаний в Гц. Учитывая, что Wn = W/2 имеем Wn = W/2 = √͞с/͞͞М, где с –суммарная жесткость пружин. Откуда имеем: с = М* W2/4.
6. Момент небалансов и вынуждающая сила: А∞ = Мнеб* е/М, где Мнеб –масса небалансов; е – эксцентриситет; Р = Мнеб* е* W2.
7. Мощность двигателя. Общая мощность двигателя определяется как сумма энергии, идущей на погружение сваи (полезная мощность), и плюс потери, связанные с работой вибратора. Полезная мощность определяется через энергию удара. Так энергия передающаяся свае ударом молота определяется как: J1 = М*V2уд/2; после удара J2 = М*V2уд* R2 /2; энергия отданная свае равна J = М*V2уд/2(1- R2). Полезная мощность определится как:
N1 = J* λ.
Мощность затрачиваемая на поддержание колебаний – N2 –по обычной формуле.
Погружение свай методом вибровдавливания. Как отмечалось выше (3.1.1) вдавливание свай применяется в жилищном и промышленном строительстве при наличии грунтов с малым расчетным сопротивлением, где погружение свай методом забивки исключено.
Более эффективным является метод вибровдавливания, при котором погружение свай происходит за счет одновременного воздействия на них вибрационных усилий низкочастотного вибропогружателя с подрессорной пригрузкой и вертикальных сил вдавливания, создаваемых массами сваи, вибропогружателя и частично массой всей установки. Вибровдавливающие агрегаты погружают сваи длиной 6... 7 м при строительстве линий электропередачи и других линейных сооружений. Такие установки могут устанавливливаться на тракторах.
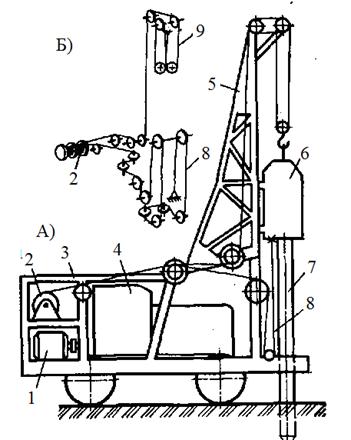
Рис. 3.53. Копровое оборудование для вибровдавливания свай.
В комплект копрового оборудования установки входят рама 3 (рис. 3.53,а), мачта 5, двухбарабанная реверсивная лебедка 2 с электроприводом, вибропогружатель 6 и канатно-блочная система вдавливания. Питание электродвигателей лебедки и вибропогружателя производится от синхронного генератора 1, вращаемого валом отбора мощности базового трактора. Один барабан реверсивной лебедки используется для подъема—опускания вибропогружателя, а второй — для создания пригрузочного усилия. Тяговое усилие на каждом барабане лебедки составляет 40 кН. Схема запасовок канатов подъемного 9 и пригрузочного 8 механизмов показана на рис. 3.53,б. Спереди трактора 4 на опорах рамы смонтирована пространственная решетчатая мачта 5 с оголовком, служащая подъемным и направляющим устройством для вибропогружателя и сваи. При перебазировках машины мачта переводится в горизонтальное положение. При вдавливании сваи в плотные грунты вначале трубчатым лидером 7, входящим в комплект агрегата, продавливают до заданной отметки лидирующую скважину, площадь поперечного сечения которой не превышает 50% поперечного сечения сваи. Лидер из скважины извлекают лебедкой при работающем вибраторе. Затем в лидирующую скважину устанавливают жестко соединенную с вибропогружателем сваю и вдавливают ее так же, как лидер.
Основным недостатком методов вдавливания и вибровдавливания свай является невозможность проведения работ в зимнее время, так как это связано с предварительным прорезанием слоя мерзлого грунта или отогревом его, что резко повышает стоимость и продолжительность производства свайных работ.
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 6240; Нарушение авторских прав?; Мы поможем в написании вашей работы!