КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Можно также составить три уравнения моментов сил относительно трех точек, не лежащих на одной прямой, т. е
|
|
|
|
Условия (1.38) называются уравнениями равновесия произвольной системы сил на плоскости. Для статической определенности задачи необходимо, чтобы число неизвестных не превышало трех.
Рассмотрим произвольную систему сил, расположенных в одной плоскости (рис. 18). Для удобства исследования совместим с этой плоскостью координатную плоскость Оху. Тогда из шести уравнений (1.37) третье, четвертое и пятое обратятся в тождества.
Уравнения (1.36) выражают механические условия равновесия произвольной пространственной системы сил (свободного твердого тела).
Где
Условия равновесия произвольной системы сил в пространстве. Необходимыми и достаточными условиями равновесия произвольной пространственной системы сил, приложенных к твердому телу, являются обращение в нуль ее главного вектора и главного момента относительно какой-либо точки пространства
Теорема о параллельном переносе силы
Пара сил
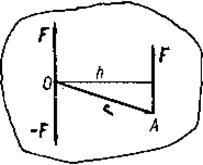
Парой сил называется система двух параллельных сил, равных по величине, направленных в противоположные стороны и приложенных к твердому телу.
Пара сил может быть ориентирована положительно (против часовой стрелки в правой системе координат) и отрицательно (по часовой стрелке в левой системе координат). Очевидно, что с переходом от правой системы координат к левой ориентация пары сил изменяется на противоположную. Кратчайшее расстояние Н между линиями действия сил пары называется ее плечом.
Главный вектор пары сил равен нулю. Пусть силы F и — F пары приложены соответственно в точках А и В. Определим главный момент пары сил относительно какой-либо точки О. Главный момент пары сил не зависит от выбора центра моментов; он обозначается М и называется моментом пары сил:
|
|
|
1 М0 = М = В А х F.
Итак, момент пары сил — это свободный вектор, по модулю равный М = Fh и направленный перпендикулярно плоскости ее действия так, чтобы с вершины этого вектора пара сил была ориентирована положительно.
Теорема. Действие силы на твердое тело не изменится, если перенести ее параллельно самой себе в некоторую точку (центр приведения), присоединив при этом пару сил.
Пусть к телу приложена в точке А сила Р (рис. 15), выберем произвольный центр приведения — точку О. По первой аксиоме в точке О приложим силы Р и —р. Тогда в точке О получим силу Р, перенесенную параллельно самой себе, и присоединенную пару, момент которой равен моменту данной силы Р относительно центра приведения О:
М (F, —F) = Мо (F).
Условия равновесия различных систем сил,
приложенных к твердому телу
R = 0, М0 = 0,
R= , M0=
, M0= .
.
Условия равновесия произвольной пространственной системы сил можно выразить в геометрической форме: многоугольники сил и моментов этих сил должны быть замкнутыми.
При равновесии векторы R и Мо равны нулю, следовательно, равны нулю и их проекции на координатные оси. На основании формул (1.25) и (1.27) получим условия равновесия произвольной пространственной системы сил в аналитической форме:






Произвольная пространственная система сил (свободное твердое тело) находится в равновесии, когда алгебраические суммы проекций всех сил на три координатные оси и алгебраические суммы моментов этих сил относительно координатных осей равны нулю
Условия равновесия, выраженные в аналитической форме, называются также уравнениями равновесия. Если число неизвестных превышает число уравнений равновесия, то задача является статически неопределенной.
2. Условия равновесия сил, произвольно расположенных в одной
плоскости.
|
|
|
Таким образом, произвольная система сил, расположенных в одной плоскости, уравновешивается лишь в том случае, когда алгебраические суммы проекций всех сил на две координатные оси (Ох и Оу) и алгебраическая сумма моментов сил относительно произвольной точки этой плоскости равны нулю:



Заметим, что форму уравнений равновесия можно изменить, но нельзя изменить их количества, так как оно соответствует механическим условиям равновесия. Можно составить одно уравнение проекций сил на одну из координатных осей (например, Ох) и два уравнения моментов сил относительно двух точек А u В, лежащих в плоскости действия сил, причем прямая АВ не должна быть перпендикулярной к оси Ох, а именно!
 ,
, 


|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 545; Нарушение авторских прав?; Мы поможем в написании вашей работы!