КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Уравнения кинематики манипулятора
|
|
|
|
Лекция 4
Для манипулятора Пума
Рисунок 3.4. Формирование систем координат звеньев
После построения ДХ-координат для всех звеньев можно построить однородные матрицы преобразования, связывающие i- ю и (i -1)-ю системы координат:
i-1 A i = T z,d T z,Q T x,a T x,α = . (3-1)
. (3-1)
Преобразуя (3-1), найдем, что матрица, обратная к i-1 А i, имеет вид:
 . (3.2)
. (3.2)
где  - константы, а
- константы, а  - присоединенная переменная, если рассматриваемое сочленение – вращательное.
- присоединенная переменная, если рассматриваемое сочленение – вращательное.
Используя матрицу  , можно связать однородные координаты р i точки р относительно i -й системы координат (точка р покоится в i –й системе координат)с односторонними координатами этой точки относительно (i -1)-й системы тсчета, связанной с (i -1)-м звеном. Эта связь устанавливается равенством:
, можно связать однородные координаты р i точки р относительно i -й системы координат (точка р покоится в i –й системе координат)с односторонними координатами этой точки относительно (i -1)-й системы тсчета, связанной с (i -1)-м звеном. Эта связь устанавливается равенством:
 , (3-3)
, (3-3)
где  и
и  .
.
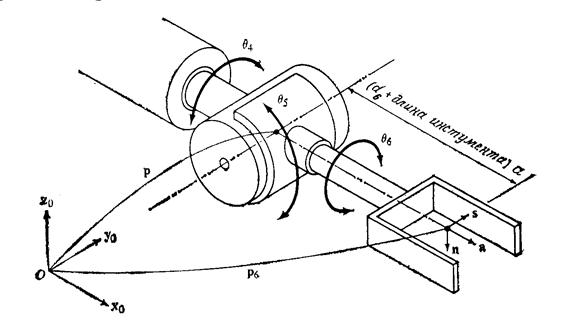
Рисунок 4.1. Система координат схватa
Однородная матрица  , определяющая положение i -й системы координат относительно базовой системы координат, представляет собой произведение последовательности однородных матриц преобразования i-1Ai и имеет вид:
, определяющая положение i -й системы координат относительно базовой системы координат, представляет собой произведение последовательности однородных матриц преобразования i-1Ai и имеет вид:
0 T i = 0A i 1A i …i-1A i = =
= =
= для i =1, 2, …, n,
для i =1, 2, …, n,
где  - матрица, определяющая ориентацию i -й системы координат, связанной с i -м звеном, по отношению к базовой системе координат. Это верхняя левая подматрица
- матрица, определяющая ориентацию i -й системы координат, связанной с i -м звеном, по отношению к базовой системе координат. Это верхняя левая подматрица  , имеющая размерность 3×3.
, имеющая размерность 3×3.
р i - вектор, соединяющий начало базовой системы координат с началом i -й системы координат. Это верхняя правая подматрица матрицы , имеющая размерность 3×1. В частности, при i =6 мы получаем матрицу  , которая задает положение и ориентацию схвата манипулятора относительно базовой системы координат. Эта матрица часто используется при описании кинематики манипулятора. Ее называют «матрицей манипулятора».
, которая задает положение и ориентацию схвата манипулятора относительно базовой системы координат. Эта матрица часто используется при описании кинематики манипулятора. Ее называют «матрицей манипулятора».
Положим, что матрица Т имеет следующий вид:
T = =
= =
= =
= ,
,
где n – вектор нормали к схвату. В случае плоскопараллельного движения пальцев этот вектор перпендикулярен пальцам манипулятора;
s – касательный вектор схвата. Он лежит в плоскости движения пальцев и указывает направление движения пальцев во время открытия или закрытия схвата;
a - вектор подхода схвата. Он направлен по нормали к ладони схвата, (т.е. перпендикулярно плоскости крепления инструмента в схвате);
p - вектор положения схвата. Этот вектор направлен из начала базовой системы координат к началу системы координат схвата, которое, как правило, расположено в точке, являющейся геометрическим центром полностью сжатых пальцев.
Если положение манипулятора в абсолютном пространстве определяется матрицей B, а в схвате манипулятора зафиксирован инструмент, положение которого в системе координат схвата определяется матрицей H, то положение рабочего узла инструмента относительно абсолютной системы координат дается произведением матриц В, 0 Т 0 и Н, т.е.:
 . (4-1)
. (4-1)
При этом H ≡  , B ≡
, B ≡  .
.
Решение прямой задачи кинематики для шестизвенного манипулятора является вычислением T =0 A 6 с помощью последовательного перемножения шести матриц i -1 A i . Решение этой задачи приводит к единственной матрице Т при заданных  и фиксированных системах координат, где
и фиксированных системах координат, где  для вращательного сочленения и
для вращательного сочленения и  для поступательного сочленения. Ограничения определяются только физическими пределами изменения
для поступательного сочленения. Ограничения определяются только физическими пределами изменения  для каждого сочленения манипулятора.
для каждого сочленения манипулятора.
Матрица T манипулятора Пума имеет вид:
T = 0 A 11 A 22 A 33 A 44 A 55 A 6= , (4-2)
, (4-2)
Рассмотрим произвольную точку, неподвижную относительно i -го звена и заданную в системе координат i -го звена однородными координатами  (рис. 4.2):
(рис. 4.2):
 . (4-3)
. (4-3)
Обозначим через координаты этой же точки относительно базовой системы координат. Матрица обозначает матрицу преобразования однородных координат, определяющую пространственное положение системы координат i -го звена относительно системы координат (i -1)-го звена, а
координаты этой же точки относительно базовой системы координат. Матрица обозначает матрицу преобразования однородных координат, определяющую пространственное положение системы координат i -го звена относительно системы координат (i -1)-го звена, а  -матрицу, определяющую связь между системой координат i -го звена и базовой системой координат.
-матрицу, определяющую связь между системой координат i -го звена и базовой системой координат.
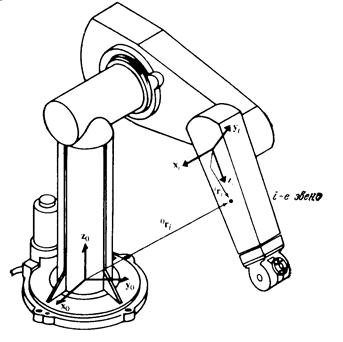
Рисунок 4.2. Точка i -го звена
Тогда связь между  и
и  определяется соотношением:
определяется соотношением:
 , (4-4)
, (4-4)
где  .
.
(4-5)
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 800; Нарушение авторских прав?; Мы поможем в написании вашей работы!
