КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тема 4.3 Синхронізація в ЦСП
|
|
|
|
ТАКТОВАЯ СИНХРОНИЗАЦИЯ. ВЫДЕЛЕНИЕ ТАКТОВОЙ ЧАСТОТЫ
Принципы построения систем тактовой синхронизации. Устройства тактовой синхронизации УТС обеспечивают синхронную работу ГО приемной и передающей частей ЦСП. Только в этом случае ГО приемной части будет вырабатывать управляющие сигналы, совпадающие по частоте и времени с импульсными последовательностями, поступающими в приемное оборудование ЦСП из линейного тракта, обеспечивая тем самым правильное распределение принимаемых импульсов по канальным интервалам и циклам и соответственно правильное декодирование кодовых комбинаций. Следовательно, основная задача УТС — исключить расхождение частот ГО передачи и приема или, в крайнем случае, обеспечить небольшую величину этого расхождения. Как известно, в аналоговых системах передачи для этих целей применяют, в основном, технические решения, обеспечивающие стабилизацию частоты задающих генераторов приемного и передающего оборудования (например, кварцевую стабилизацию). Рассмотрим, достаточно ли применения принципа стабилизации частоты ЗГ для цифровых систем передачи.
Предположим, что частота ЗГ первичной ЦСП f зг = f т = = 2,048 МГц. Определим максимально допустимую относительную нестабильность частоты ЗГ: k =  f згmax/ f зг н, где f зг н — номинальное значение f зг, а f згmах—максимальное отклонение частоты ЗГ от номинального значения. Очевидно, что в предельном случае управляющий распределительный импульс может не совпадать по временному положению с регистрируемым на величину, равную длительности одного символа, т, е. половину тактового интервала Т/2 (в этом случае говорят о несинхронное передающего и приемного оборудования по символам). В наихудшем случае при отклонении частот ЗГ в разные стороны от f зп н на величину f зп mах взаимное положение регистрируемого и управляющего импульсов должно отличаться на t<T/2= l/(2 f TН). При этом период f т не должен изменяться больше чем на Т/4.
f згmax/ f зг н, где f зг н — номинальное значение f зг, а f згmах—максимальное отклонение частоты ЗГ от номинального значения. Очевидно, что в предельном случае управляющий распределительный импульс может не совпадать по временному положению с регистрируемым на величину, равную длительности одного символа, т, е. половину тактового интервала Т/2 (в этом случае говорят о несинхронное передающего и приемного оборудования по символам). В наихудшем случае при отклонении частот ЗГ в разные стороны от f зп н на величину f зп mах взаимное положение регистрируемого и управляющего импульсов должно отличаться на t<T/2= l/(2 f TН). При этом период f т не должен изменяться больше чем на Т/4.
Предположим, что в момент включения системы частоты ЗГ передающей и приемных частей первичной ЦСП одинаковы и в дальнейшем расходятся. Определим, за какой промежуток времени tпс при относительной нестабильности k частот ЗГ будет достигнуто положение не синхронности по символам. Так как
tпс = T/(4k) = 1/(4 f тk), то, следовательно, k= l/(4 f Ttпc)  1/(8*10-6 f пc). Если принять, что система будет выходить из состояния синхронизма каждый час (а это будет очень плохая система, так как выход из состояния синхронизма по символам приводит к прекращению связи), то требуемая в этом случае относительная нестабильность частоты ЗГ составит k= 1/(8*106• 3,6• 103) 3,7*10-11, что недостижимо по техническим и экономическим соображениям.
1/(8*10-6 f пc). Если принять, что система будет выходить из состояния синхронизма каждый час (а это будет очень плохая система, так как выход из состояния синхронизма по символам приводит к прекращению связи), то требуемая в этом случае относительная нестабильность частоты ЗГ составит k= 1/(8*106• 3,6• 103) 3,7*10-11, что недостижимо по техническим и экономическим соображениям.
Вывод, следующий из вышеприведенных расчетов: реализация современных ЦСП без устройств тактовой синхронизации (фазирования по посылкам) невозможна.
В ЦСП к устройствам тактовой синхронизации предъявляются следующие требования:
высокая точность подстройки частоты и фазы управляющего сигнала ЗГ приемной части; малое время вхождения в синхронизм; сохранение состояния синхронизма при кратковременных перерывах связи.
Различают две группы УТС, отличающиеся методом использования синхросигналов. К первой группе относятся устройства с синхронизацией по специальному синхросигналу. Этот метод усложняет построение линейного тракта ЦСП и генераторного оборудования, к тому же точность установки фазы управляющих сигналов в большой степени связана с нелинейными искажениями и неравномерностью частотных характеристик линейного тракта. Ко второй группе относятся методы подстройки фазы управляющих импульсов под основной принимаемый сигнал. Такую подстройку можно осуществить либо по специальным синхроимпульсам, либо по рабочим импульсам (элементам кодовых комбинаций цикла). Применение специальных синхроимпульсов снижает пропускную способность системы, поэтому на практике нашел применение метод тактовой синхронизации по рабочим импульсам. Эту группу УТС можно разделить на две подгруппы, отличающиеся способом выделения тактовой частоты.
Основное применение в ЦСП с невысокой скоростью передачи нашли УТС с резонансной системой для выделения тактовой частоты. Достоинства таких систем — простота реализации и, как следствие, улучшение экономических показателей системы, являются определяющими при реализации ЦСП местных и зоновых сетей. Недостатки УТС такого типа: быстрое пропадание тактовой частоты при перерывах связи или при появлении в принимаемом сигнале длинных серий пробелов (нулей); зависимость стабильности выделенной тактовой частоты (а следовательно, и точности фазирования) от длины серии нулей (характера кодовых комбинаций) и стабильности параметров фильтра, выделителя тактовой частоты, а также от скорости передачи.
Более сложным является метод синхронизации с применением устройств автоподстройки частоты генераторов тактовой частоты приемного оборудования, лишенный недостатков первого метода. Иногда эти два метода называют соответственно методами пассивной и активной фильтрации частоты. Устройства тактовой синхронизации с активной фильтрацией получают все большее распространение в ЦСП в связи с их достоинствами и упрощением вопросов реализации на основе более совершенной элементной базы, обеспечиваемой развитием микроэлектроники.
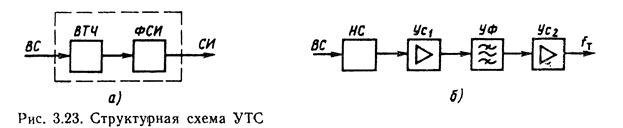
Сущность метода пассивной фильтрации тактовой частоты состоит в том, что из входного цифрового сигнала с помощью полосовых фильтров, резонансных контуров или избирательных усилителей выделяется тактовая частота. Часть УТС, обеспечивающая выполнение этих функций, называется выделителем тактовой частоты. Структурная схема этого устройства приведена на рис. 3.23, а, а структура всего УТС — на рис. 3.23, б.
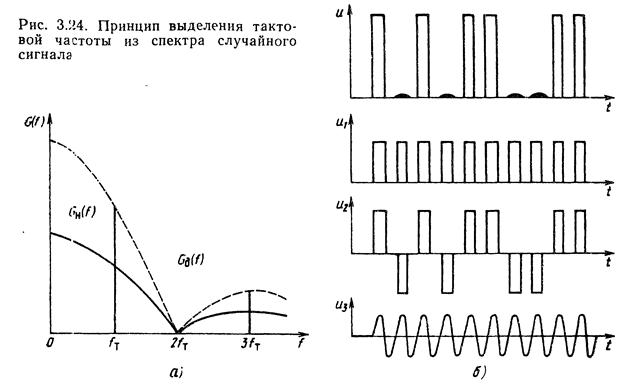
Рассмотрим сущность резонансного метода. Известно, что энергетический спектр случайной последовательности импульсов со скважностью q>1 содержит как непрерывную Gн(f), так и дискретную <Gд(f) составляющую (рис. 3.24, а). Дискретная часть энергетического спектра представляет собой сумму гармоник, кратных тактовой частоте (частоте следования импульсов). Этот вывод можно сделать, не применяя сложных математических выкладок, если представить случайный двоичный сигнал и в виде суммы регулярной однополярной последовательности импульсов и случайной двухполярной последовательности импульсов.
Как известно, регулярная последовательность импульсов с тактовой частотой fт имеет дискретный (линейчатый) спектр GД(f), в составе которого в качестве первой гармоники выступает составляющая с частотой, равной тактовой. Попутно отметим, что случайная двухполярная последовательность импульсов, как видно из рисунка, не может быть в свою очередь получена как сумма случайной и регулярной составляющих и, следовательно, спектр такой последовательности не содержит дискретных составляющих. Очевидно, что превращение двухполярной последовательности в однополярную (например, применением выпрямительных устройств) позволяет восстановить дискретную часть спектра. Следует обратить внимание на то, что если линейный сигнал представляет собой случайную последовательность импульсов с частотой fт и
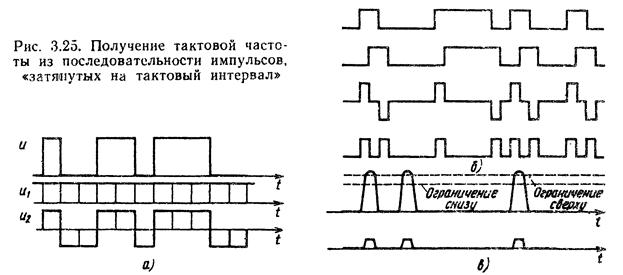
q= 1, то энергетический спектр такого сигнала вообще не содержит дискретной части спектра. Сказанное можно проследить по рис. 3.25, а, на котором показано, что, если q>1, то регулярная последовательность импульсов «сливается» в постоянную составляющую.
ЦИКЛОВАЯ СИНХРОНИЗАЦИЯ
Принципы организации цикловой синхронизации. Синхронизация приемной и передающей станции по циклам обеспечивает правильное декодирование кодовых групп и распределение группового АИМ сигнала по соответствующим приемникам каналов. Для обеспечения этой синхронизации в начале каждого цикла в состав группового цифрового сигнала вводится специальный синхросигнал, который представляет собой отдельный импульс или группу импульсов определенной комбинации.
К системам цикловой синхронизации предъявляются следующие основные требования:
- время вхождения в синхронизм при первоначальном включении аппаратуры в работу и время восстановления синхронизма при его нарушении должно быть минимально возможным;
- число разрядов синхросигнала в цикле передачи при заданном времени восстановления синхронизма должно быть минимальным;
- приемник синхросигнала должен быть помехоустойчивым, что обеспечивает большее среднее время между сбоями синхронизма.
При реализации этих требований приходится решать противоречивые задачи. Ввод синхросигнала в групповой сигнал дополнительно к кодовым группам информации требует увеличения скорости передачи группового сигнала, а это увеличивает полосу частот, передаваемых по линии. Если скорость передачи оставить прежней, то синхросигнал надо вводить взамен части информационных символов, а это уменьшает пропускную способность системы передачи. Аналогичные противоречия встречаются и при выборе числа разрядов в синхросигнале. Уменьшение разрядов в синхросигнале повышает пропускную способность ЦСП, но увеличивает время восстановления синхронизма, так как возрастает вероятность появления аналогичных комбинаций в информационных символах.
Увеличение разрядов в синхросигнале улучшает работу цикловой синхронизации, но уменьшает пропускную способность ЦСП.
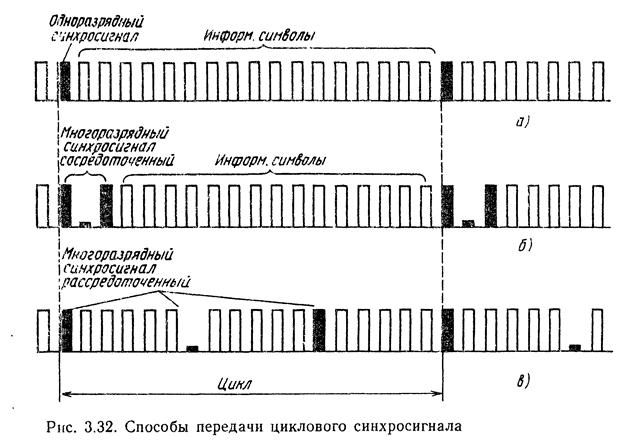
Отметим основные отличительные признаки синхросигнала и способы ввода его в групповой сигнал. Основными отличительными особенностями синхросигнала являются его периодичность, или повторяемость, на одних и тех же позициях в каждом цикле и постоянство кодовой комбинации. Эти свойства используются при выделении синхросигнала на приемной станции. Групповой цифровой сигнал каналов в силу случайного характера абонентских сигналов свойствами периодичности не обладает. По числу разрядов различают одноразрядные и многоразрядные синхросигналы. Многоразрядные синхросигналы различаются по распределению разрядов в цикле передачи: сосредоточенные, рассредоточенные. На рис. 3.32 показаны циклы, содержащие одноразрядный (рис. 3.32, а) и многоразрядные (с комбинацией 101) сосредоточенный (рис. 3.32, б) и рассредоточенный (рис. 3.32, в) синхросигналы. Наибольшее распространение в ЦСП получил способ передачи многоразрядного сосредоточенного синхросигнала. Кодовая комбинация синхросигнала должна выбираться такой, чтобы вероятность ее появления при передаче информационных символов была наименьшей. Построению систем цикловой синхронизации с использованием передачи сосредоточенного синхросигнала и будет уделено основное внимание.




 Система цикловой синхронизации представляет собой совокупность устройств,
Система цикловой синхронизации представляет собой совокупность устройств, 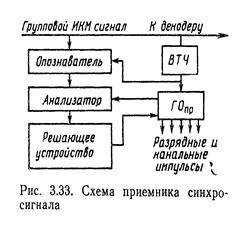 обеспечивающих синхронную работу соответствующих узлов (разрядных и канальных распределителей) ГО приемной и передающей станций. На передающей станции находится устройство формирования и ввода синхрогруппы в групповой цифровой сигнал. Это устройство достаточно просто реализуется и рассматривается при разборе конкретных систем передачи. На приемной станции находится приемник синхросигнала, обеспечивающий установку синхронизма после включения аппаратуры в работу, контроль за состоянием синхронизма в рабочем режиме, обнаружение сбоя синхронизма и его восстановление. Рассматривая принцип построения приемника синхросигнала, схема которого показана на рис. 3.33, можно выделить следующие основные узлы: опознаватель, анализатор, решающее устройство.
обеспечивающих синхронную работу соответствующих узлов (разрядных и канальных распределителей) ГО приемной и передающей станций. На передающей станции находится устройство формирования и ввода синхрогруппы в групповой цифровой сигнал. Это устройство достаточно просто реализуется и рассматривается при разборе конкретных систем передачи. На приемной станции находится приемник синхросигнала, обеспечивающий установку синхронизма после включения аппаратуры в работу, контроль за состоянием синхронизма в рабочем режиме, обнаружение сбоя синхронизма и его восстановление. Рассматривая принцип построения приемника синхросигнала, схема которого показана на рис. 3.33, можно выделить следующие основные узлы: опознаватель, анализатор, решающее устройство.
Опознаватель синхросигнала предназначен для выделения из группового ИКМ сигнала кодовых комбинаций, совпадающих по структуре с синхросигналом. Анализатор определяет соответствие момента времени прихода истинной синхрогруппы и контрольного сигнала с генераторного оборудования. Решающее устройство определяет состояние синхронизма, момент выхода из синхронизма, управляет работой соответствующих узлов ГО в режиме поиска синхронизма.
Алгоритм поиска синхросигнала при нарушении синхронизма показан на рис. 3.34. Опознаватель, сдвигая каждый раз момент
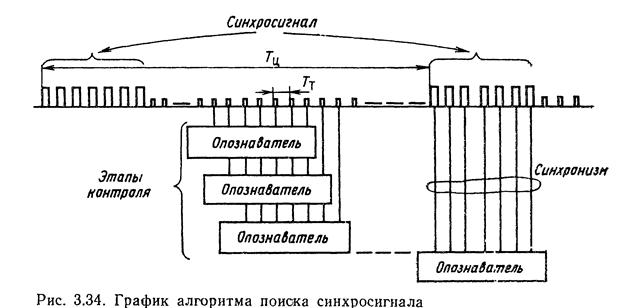
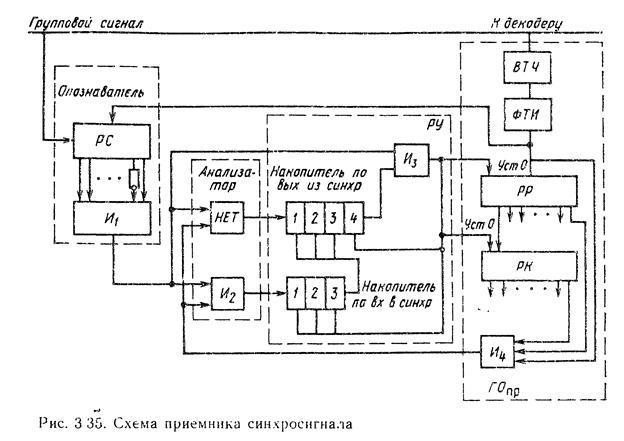
регистрации на один такт, будет пробовать поступающие комбинации группового сигнала на их соответствие синхрогруппе. Таким образом, если за период цикла будет отсутствовать комбинация, похожая на синхрогруппу, а это маловероятно, синхросигнал будет найден в течение одного цикла или быстрее. Для подтверждения правильности выделения синхросигнала следующая проверка наличия синхросигнала будет ровно через цикл. Приемник синхронизации с таким принципом работы называется приемником со скользящим поиском и одноразрядным сдвигом. Развернутая структурная схема такого приемника синхросигнала показана на рис. 3.35. На схеме штриховой линией выделены опознаватель, анализатор, решающее устройство, генераторное оборудование приема.
Опознаватель синхросигнала может быть построен как регистр сдвига и дешифратор — многовходовая схема совпадения И1. Анализатор содержит элементы НЕТ и И2. Появление импульса на выходе И2 означает совпадение по времени синхросигнала и контрольного импульса от ГОпр. Появление импульса на выходе схемы НЕТ означает отсутствие синхросигнала в момент появления контрольного импульса от ГОпр.
Решающее устройство содержит накопитель по выходу из синхронизма, накопитель по входу в синхронизм, схему Из. Накопители по входу и выходу из синхронизма выполнены по схеме счетчика со сбросом.
C6ой синхронизма при искажении символа синхрогруппы показан на рис. 3.36, а. Из временных диаграмм 2 и 3 видно, что цикловая синхронизация не нарушена и подстройку ГОпр производить не требуется. Сбой синхронизма при изменении длительности цикла показан на рис. 3.36, б, В данном случае восстановление синхронизма возможно только при подстройке ГОпр.
Из приведенных выше примеров можно сделать вывод, что в первом случае защиту приемника синхронизации от сбоя обеспечивает накопитель по выходу из синхронизма, тогда как во втором
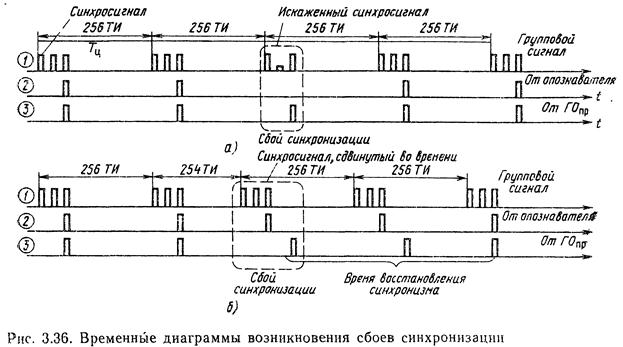
случае желательно начинать поиск синхросигнала по первому его пропаданию. В этом случае накопитель по выходу из синхронизма будет увеличивать время восстановления синхронизма. Время восстановления синхронизма является одним из основных параметров ДСП. Допустимое время восстановления синхронизма определяется свойствами передаваемой информации.
|
|
|
|
Дата добавления: 2013-12-13; Просмотров: 438; Нарушение авторских прав?; Мы поможем в написании вашей работы!