КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механические колебания
|
|
|
|
Рис. 6
Рис.4 Рис.5
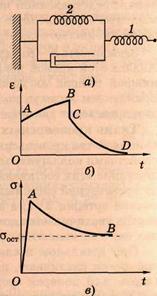
В момент t1 соответствующий точке В, нагрузка была снята. ВС соответствует быстрой деформации сокращения, CD — обратной ползучести. В результате даже за длительный период образец кости не восстанавливает своих прежних размеров, сохраняется некоторая остаточная деформация  .
.
Этой зависимости приближенно соответствует модель (рис.6, а), сочетающая последовательное соединение пружины с моделью Кельвина—Фойхта. Временная зависимость относительной деформации показана на рис.6, б. При действии постоянной нагрузки мгновенно растягивается пружина 1 (участок ОА), затем вытягивается поршень (ползучесть АВ), после прекращения нагрузки происходит быстрое сжатие пружины 1 (ВС), а пружина 2 втягивает поршень в прежнее положение (ползучесть CD). В предложенной модели не предусматривается остаточная деформация.
Схематично можно заключить, что минеральное содержимое кости обеспечивает быструю деформацию, а полимерная часть (коллаген) определяет ползучесть.
Если в кости или в ее механической модели быстро создать постоянную деформацию, то скачкообразно возникает и напряжение (участок ОА на рис.6, в). На модели это означает растяжение пружины 1 и возникновение в ней напряжения. Затем (участок АВ) эта пружина будет сокращаться, вытягивая поршень и растягивая пружину 2, напряжение в системе будет убывать (релаксация напражения). Однако даже спустя значительное время сохранится остаточное напряжение стост. Для модели это означает, что не возникнет при постоянной деформации такой ситуации, чтобы пружины вернулись в недеформированное состояние.
|
Ткань кровеносных сосудов (сосудистая ткань). Механические свойства кровеносных сосудов определяются главным образом свойствами коллагена, эластина и гладких мышечных волокон. Содержание этих составляющих сосудистой ткани изменяется по ходу кровеносной системы: отношение эластина к коллагену в общей сонной артерии 2:1, а в бедренной артерии 1: 2. С удалением от сердца увеличивается доля гладких мышечных волокон, в артериолах они уже являются основной составляющей сосудистой ткани.
При детальном исследовании механических свойств сосудистой ткани различают, каким образом вырезан из сосуда образец (вдоль или поперек сосуда). Можно, однако, рассматривать деформацию сосуда в целом как результат действия давления изнутри на упругий цилиндр.
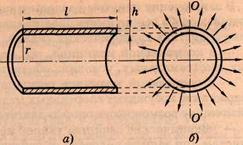
Рис.7
Рассмотрим цилиндрическую часть кровеносного сосуда длиной I, толщиной h и радиусом внутренней части г. Сечения вдоль и поперек оси цилиндра показаны на рис. 7, а, б. Две половины цилиндрического сосуда взаимодействуют между собой по сечениям стенок цилиндра (заштрихованные области на рис.7, а). Общая площадь этого «сечения взаимодействия» равна 2М. Если в сосудистой стенке существует механическое напряжение и, то сила взаимодействия двух половинок сосуда равна
 (1)
(1)
Эта сила уравновешивается силами давления на цилиндр изнутри (они показаны стрелками на рис.7, б). Силы направлены под разными углами к горизонтальной плоскости (на рисунке). Для того чтобы найти их равнодействующую, следует просуммировать горизонтальные проекции. Однако проще найти равнодействующую силу, если умножить давление на проекцию площади полуцилиндра на вертикальную плоскость ОО'. Эта проекция равна  . Тогда выражение для силы через давление имеет вид
. Тогда выражение для силы через давление имеет вид
F=p 2rl. (2)
Приравнивая (1) и (2), получаем  , откуда
, откуда
 (3)
(3)
Это уравнение Ламе.
Будем считать, что при растяжении сосуда объем его стенки не изменяется (площадь стенки возрастает, а толщина убывает), т. е. не изменяется площадь сечения стенки сосуда (рис.7, б):
 т.е.
т.е.  (4)
(4)
С учетом (4) преобразуем (3):
 . (5)
. (5)
Из (5) видно, что в капиллярах  напряжение отсутствует
напряжение отсутствует  .
.
В заключение отметим разделы и направления медицины, для которых особо важно иметь представление о пассивных механических свойствах биологических тканей:
— в космической медицине, так как человек находится в новых, экстремальных, условиях обитания;
— в спортивной медицине результативность достижений и ее
возрастание побуждают спортивных медиков обращать внимание на
физические возможности опорно-двигательного аппарата человека;
— механические свойства тканей необходимо учитывать гигиенистам при защите человека от действия вибраций;
— в протезировании при замене естественных органов и тканей искусственными также важно знать механические свойства и параметры биологических объектов;
— в судебной медицине следует знать устойчивость биологических структур по отношению к различным деформациям;
— в травматологии и ортопедии вопросы механического воздействия на организм являются определяющими.
Механическая работа человека. Эргометрия
Механическая работа, которую способен совершить человек в течение дня, зависит от многих факторов, поэтому трудно указать какую-либо предельную величину. Это замечание относится и к мощности. Так, при кратковременных усилиях человек может развивать мощность порядка нескольких киловатт. Если спортсмен массой 70 кг подпрыгивает с места так, что его центр масс поднимается на 1 м по отношению к нормальной стойке, а фаза отталкивания длится 0,2 с, то он развивает мощность околс 3,5 кВт.
При ходьбе человек совершает работу, так как при этом энергия затрачивается на периодическое небольшое поднятие тела и на ускорение и замедление конечностей, главным образом ног.
Человек массой 75 кг при ходьбе со скоростью 5 км/ч развивает мощность около 60 Вт. С возрастанием скорости эта мощность быстро увеличивается, достигая 200 Вт при скорости 7 км/ч При езде на велосипеде положение центра масс человека изменяется гораздо меньше, чем при ходьбе, а ускорение ног тоже меньше. Поэтому мощность, затрачиваемая при езде на велосипеде, значительно меньше: 30 Вт при скорости 9 км/ч, 120 Вт пр: 18 км/ч.
Работа обращается в нуль, если перемещения нет. Поэтому когда груз находится на опоре или подставке или подвешен на нити, сила тяжести не совершает работы. Однако каждому из нас знакома усталость мышц руки и плеча, если держать неподвижно на вытянутой руке гирю или гантель. Точно так же устают мышцы спины и поясничной области, если сидящему человеку поместить на спину груз. В обоих случаях груз неподвижен и работы нет. Усталость же свидетельствует о том, что мышцы совершают работу. Такую работу называют статической работой мышц.
Статики (неподвижности) такой, как ее понимают в механике, на самом деле нет. Происходят очень мелкие и частые, незаметные глазу сокращения и расслабления, и при этом совершается работа против сил тяжести. Таким образом, статическая работа человека на самом деле является обычной динамической работой. Для измерения работы человека применяют приборы, называемые эргометрами. Соответствующий раздел измерительной техники называется эргометрией.
Некоторые особенности поведения человека при перегрузках и невесомости
В обычных условиях на человека действуют сила тяжести и сила реакции опоры. При отсутствии ускорения эти силы равны и противоположно направлены. Такое состояние естественно для человека.
При ускоренном движении системы могут возникнуть особые состояния, называемые перегрузками и невесомостью.
Рассмотрим пример.
Пусть человек находится в кабине лифта (в ракете), который поднимается вверх с ускорением а. На человека действуют сила тяжести mg и сила реакции опоры F. По второму закону Ньютона, Fр + mg = та, или в скалярной форме с учетом на-
правления сил
Fр - mg = та; Fp=m(g+a).
В этом случае сила реакции опоры больше силы тяжести (F > > mg), и возникают перегрузки. Так, если а = g, то F = 2mg (двукратная перегрузка), если а = 2g, то Fp = 3mg (трехкратная пере-
грузка) и т. д. Перегрузка выражается отношением  .
.
Перегрузки могут оказывать существенное влияние на организм человека, так как в этих состояниях происходит отток крови, изменяется взаимное давление внутренних органов друг на друга, возникает их деформация и т. п. Поэтому человек способен выдерживать лишь ограниченные перегрузки.
Вестибулярный аппарат
как инерциальная система ориентации
В обычных условиях положение свободно подвешенного маятника указывает направление силы тяжести (рис. 4.8, а). Если маятник покоится относительно ускоренно движущейся системы отсчета (неинерциальная система отсчета), то его положение зависит от ускорения системы а. По второму закону Ньютона,
Fн + mg = Fр = та, где результирующая сила равна по величине
Fp = mg tg , или та = mg tg , откуда
, или та = mg tg , откуда
а = g tg .
Следовательно, даже простой математический маятник в принципе может быть использован для определения модуля и направления ускорения системы.
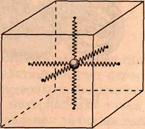
Более удобным индикатором ускорения системы является устройство, изображенное на рис.8. — тело известной массы укреплено на шести пружинках. По деформации пружин можно определить значение и направление
|
Рис. 8
силы, действующей на тело, а отсюда и ускорение системы, если учесть ускорение свободного падения. Такого рода индикаторы используются в инерциальной навигации, получившей развитие в связи с решением космических задач.
В самом деле, если известно ускорение системы, например ракеты, в каждый момент времени, то можно найти зависимость скорости от времени:

Определив v = f(t), можно найти положение системы в любой момент:

Таким образом, можно без помощи средств, находящихся вне ракеты, автономно установить ее местоположение, скорость и ускорение в любой момент времени.
Соответствующие устройства называются инерциальными системами ориентации.
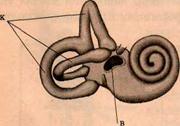
В человеческом организме имеется орган, который тоже, по существу, является инерциальной системой ориентации, — это вестибулярный аппарат1. Он расположен во внутреннем ухе и состоит из трех взаимно перпендикулярных полукружных каналов К и полости — преддверия В (рис.9). На внутренней поверхности стенок преддверия и в части полукружных каналов находятся группы чувствительных нервных клеток, имеющих свободные окончания в форме волосков. Внутри преддверия и полукружных каналов есть студенистая масса (эндолимфа), содержащая мелкие кристаллы фосфорнокислого и угле
кислого кальция (отолиты). Ускоренное перемещение головы вызывает перемещение эндолимфы и отолитов, что воспринимается нервными клетками (через волоски). Вестибулярный аппарат, как и любая другая физическая система, не отличает гравитационное воздействие от воздействий, возникающих при ускоренном движении системы..
|
Рис.9
От системы, изображенной на рис. 4.9, вестибулярный аппарат принципиально отличается тем, что не способен количественно определить ускорение человека. Это обстоятельство не позволяет человеку, едущему в закрытой кабине машины, определить местонахождение автомобиля..
Наш организм приспособился к действию силы тяжести; соответствующую привычную информацию клетки вестибулярного аппарата сообщают в мозг, поэтому состояния невесомости и перегрузок воспринимаются нами посредством вестибулярного аппарата (и других органов) как необычные состояния, к которым необходимо приспособиться.
Если оказывается периодическое воздействие на вестибулярный аппарат человека, например, при качке корабля, то это мо-сет привести организм в особое состояние, называемое морской болезнью.
|
|
|
|
|
Дата добавления: 2013-12-13; Просмотров: 556; Нарушение авторских прав?; Мы поможем в написании вашей работы!