КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дифференциальные методы кодовой модуляции
|
|
|
|
Речевой сигнал характеризуется сильной автокорреляцией. Это означает, что две соседних выборки не могут сильно отличаться друг от друга. Соответственно, если кодировать только разность между ними, то можно снизить скорость передачи двоичных данных. Знание нескольких последовательных отсчетов позволяет предсказать последующий отсчет. Т.о. можно кодировать разность между текущим и предсказанным значением. Кодер дифференциальной импулъсно-кодовой модуляции (ДИКМ)реализует эту идею.
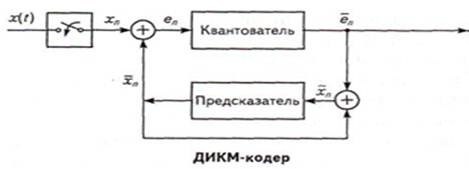
Рисунок 7.4 - Структурная схема системы ДИКМ
В дифференциальных кодеках квантованию и передаче по цифровому каналу подвергается разность между текущим отсчетом (выборкой) РС х n и его предсказанным значением  т.е. ошибка предсказания
т.е. ошибка предсказания 
Предсказываемое значение формируется из восстановленного сигнала
Здесь  – квантованная ошибка предсказания.
– квантованная ошибка предсказания.
В качестве предсказываемого значения РС  в простейшем случае может быть использовано предыдущее отсчетное значение, хотя в общем случае используется выражение
в простейшем случае может быть использовано предыдущее отсчетное значение, хотя в общем случае используется выражение
где ai и Р - коэффициенты и порядок предсказания
Дельта-модуляция (ДМ) считается частным случаем ДИКМ-кодирования. В методе ДМ вычисляется разница между текущим и предыдущим отсчетами. Затем эта разница подвергается квантованию в одноразрядном (двухуровневом) квантователе. Этот единственный разряд просто показывает полярность отсчета разностного сигнала и посредством этого указывает на то, увеличился или уменьшился сигнал за время, прошедшее после последнего отсчета. За упрощение схемы кодирования приходится платить необходимостью увеличения частоты дискретизации по сравнению с минимально возможной частотой дискретизации, используемой в ИКМ-кодере. В простейшем ДМ-кодере частота дискретизации представляет собой компромисс между скоростью выходного потока данных и приемлемым уровнем ошибок квантования. Наиболее значительные ошибки дискретизации сигнала вызываются двумя явлениями - перегрузкой по крутизне и шумом дробления. Суть первого явления заключается в том, что при кодировании быстро изменяющегося сигнала возникают ошибки, обусловленные невозможностью изменения аппроксимирующего сигнала более чем на один шаг квантования.
|
|
|
В простейшем случае линейной ДМ-квантователь имеет только два уровня (+ D и – D) и фиксированный шаг квантования, а предсказатель представляет собой цифровое интегрирующее устройство, в котором сигнал x`(k) задерживается на время dt и умножается на коэффициент a, где 0 < a £ 1. На выходе интегратора образуется ступенчатое напряжение, крутизна которого не может превышать значение Fд D = D/dt, при котором кодированный сигнал отстоит от входного сигнала не более, чем на размер шага. Если дельта-модулятор не в состоянии отслеживать быстрые изменения во входном сигнале, то возникает "отставание" восстановленного сигнала от исходного (рисунок 7.5), характеризуемое как искажение перегрузки по крутизне.

Рисунок 7.5 Искажение перегрузки по крутизне при дельта-модуляции
Фактически, ДМ-кодер не успевает отслеживать быстрые изменения уровня сигнала и генерирует линейно изменяющийся квантованный сигнал. Шум дробления или гранулярный шум возникает при квантовании квазистационарного сигнала. При ДМ-кодировании постоянного сигнала результат представляет собой неравномерно чередующиеся положительные и отрицательные двоичные импульсы. Как показано на рис. 8.2, для медленно меняющихся сигналов основное значение имеет гранулярный шум, в то время как для быстро меняющихся сигналов - шум перегрузки по крутизне. Последний достигает пиковых значений непосредственно перед тем, как достигает максимумов кодируемый сигнал. Поэтому шум перегрузки по крутизне эффективно маскируется энергией речи, вследствие чего он менее заметен, чем шумы дробления.
|
|
|
Перегрузка по крутизне является не только ограничивающим фактором для системы с дельта-модуляцией, но и проблемой, присущей любой системе, когда кодируется разность значений соседних отсчетов. Система, оперирующая разностью, кодирует крутизну входного сигнала конечным числом разрядов и имеет, следовательно, конечный диапазон. Если крутизна превышает этот диапазон, происходит перегрузка по крутизне. В противоположность этому в обычной системе с ИКМ ограничена не скорость изменения входного сигнала, а максимальная кодируемая амплитуда. А дифференциальная система может кодировать сигналы с произвольно большими амплитудами, лишь бы эти большие амплитуды достигались постепенно.
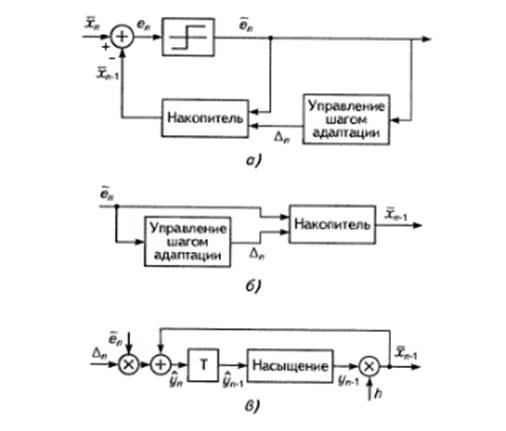
Рисунок 7.6 – Схема дельта-кодера (а), кодера с переменной крутизной (б) и накопителя, используемого в кодере и декодере(в)
Расчеты ОСШК при дельта-модуляции показывают, что последняя уступает ИКМ при больших скоростях передачи и превосходит ее при скоростях около 40 кбит/с. Так, для получения ОСШК, равного 35 дБ при частоте Найквиста (т.е. Fв) 3 кГц, требуется скорость передачи 200 кбит/с. Для улучшения эффективности ДМ применяют адаптацию - изменение шага D в соответствии с нестационарными свойствами сигнала и прежде всего - в зависимости от усредненного за короткое время значения крутизны входного сигнала.
Системы с ДИКМ обеспечивают такое качество восстановления сигнала, которое сопоставимо с качеством ИКМ-кодирования, и на порядок более высокую помехоустойчивость. Для снижения погрешности передачи при ДИКМ и повышения эффективности ДМ параметры квантователя и предсказателя должны быть согласованы со статистическими характеристиками сигнала, а поскольку последние изменяются во времени - алгоритмы должны быть адаптивными.
|
|
|
|
|
Дата добавления: 2013-12-13; Просмотров: 920; Нарушение авторских прав?; Мы поможем в написании вашей работы!