КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Геометрический способ сложения сил
Рис.13
Рис. 12
Проекция силы на ось и на плоскость.
Лекция 2. Равновесие системы сил. Пара сил.
В данной лекции рассматриваются следующие вопросы
1. Проекция силы на ось и на плоскость.
2. Геометрический способ сложения сил.
3. Равновесие системы сходящихся сил.
4. Момент силы относительно центра или точки.
5. Теорема Вариньона о моменте равнодействующей.
6. Пара сил.
7. Момент пары.
8. Свойства пар.
9. Сложение пар.
10. Теорема о параллельном переносе силы.
11. Приведение плоской системы сил к данному центру.
12. Условия равновесия произвольной плоской системы сил.
13. Случай параллельных сил.
14. Решение задач.
Изучение этих вопросов необходимо в дальнейшем для изучения центра тяжести, произвольной пространственной системы сил, сил трения скольжения, моментов трения качения, решения задач в дисциплине «Сопротивление материалов».
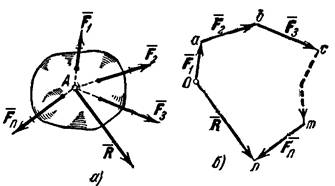
Перейдем к рассмотрению аналитического (численного) метода решения задач статики. Этот метод основывается на понятии о проекции силы на ось. Как и для всякого другого вектора, проекцией силы на ось называется скалярная величина, равная взятой с соответствующим знаком длине отрезка, заключенного между проекциями начала и конца силы. Проекция имеет знак плюс, если перемещение от ее начала к концу происходит в положительном направлении оси, и знак минус - если в отрицательном. Из определения следует, что проекции данной силы на любые параллельные и одинаково направленные оси равны друг другу. Этим удобно пользоваться при вычислении проекции силы на ось, не лежащую в одной плоскости с силой.

Обозначать проекцию силы  на ось Ох будем символом
на ось Ох будем символом  . Тогда для сил, изображенных на рис. 12, получим:
. Тогда для сил, изображенных на рис. 12, получим:
 ,
,  .
.
Но из чертежа видно, что  ,
,  .
.
Следовательно,
 ,
,  ,
,
т. е. проекция силы на ось равна произведению модуля силы на косинус угла между направлением силы и положительным направлением оси. При этом проекция будет положительной, если угол между направлением силы и положительным направлением оси - острый, и отрицательной, если этот угол - тупой; если сила перпендикулярна к оси, то ее проекция на ось равна нулю.
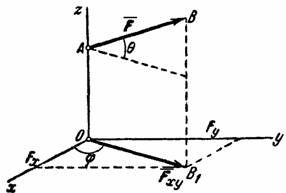
Проекцией силы на плоскость Оху называется вектор  , заключенный между проекциями начала и конца силы на эту плоскость (рис. 13). Таким образом, в отличие от проекции силы на ось, проекция силы на плоскость есть величина векторная, так как она характеризуется не только своим численным значением, но и направлением в плоскости Оху. По модулю
, заключенный между проекциями начала и конца силы на эту плоскость (рис. 13). Таким образом, в отличие от проекции силы на ось, проекция силы на плоскость есть величина векторная, так как она характеризуется не только своим численным значением, но и направлением в плоскости Оху. По модулю  , где
, где  — угол между направлением силы и ее проекции
— угол между направлением силы и ее проекции  .
.
В некоторых случаях для нахождения проекции силы на ось бывает удобнее найти сначала ее проекцию на плоскость, в которой эта ось лежит, а затем найденную проекцию на плоскость спроектировать на данную ось. Например, в случае, изображенном на рис. 13, найдем таким способом, что
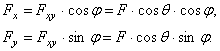
Решение многих задач механики связано с известной из векторной алгебры операцией сложения векторов и, в частности, сил. Величину, равную геометрической сумме сил какой-нибудь системы, будем называть главным вектором этой системы сил. Понятие о геометрической сумме сил не следует смешивать с понятием о равнодействующей, для многих систем сил, как мы увидим в дальнейшем, равнодействующей вообще не существует, геометрическую же сумму (главный вектор) можно вычислить для любой системы сил.
Геометрическая сумма (главный вектор) любой системы сил определяется или последовательным сложением сил системы по правилу параллелограмма, или построением силового многоугольника. Второй способ является более простым и удобным. Для нахождения этим способом суммы сил ,
,  ,
,  …,
…,  (рис. 14, a), откладываем от произвольной точки О (рис. 14, б) вектор Oa, изображающий в выбранном масштабе cилу F 1, от точки a откладываем вектор
(рис. 14, a), откладываем от произвольной точки О (рис. 14, б) вектор Oa, изображающий в выбранном масштабе cилу F 1, от точки a откладываем вектор  , изображающий силу F 2, от точки b откладываем вектор bc, изображающий силу F 3 и т. д.; от конца m предпоследнего вектора откладываем вектор mn, изображающий силу F n.Соединяя начало первого вектора с концом последнего, получаем вектор
, изображающий силу F 2, от точки b откладываем вектор bc, изображающий силу F 3 и т. д.; от конца m предпоследнего вектора откладываем вектор mn, изображающий силу F n.Соединяя начало первого вектора с концом последнего, получаем вектор  =
=  , изображающий геометрическую сумму или главный вектор слагаемых сил:
, изображающий геометрическую сумму или главный вектор слагаемых сил:
 или
или 
От порядка, в котором будут откладываться векторы сил, модуль и направление не зависят. Легко видеть, что проделанное построение представляет собою результат последовательного применения правила силового треугольника.
|
Дата добавления: 2013-12-13; Просмотров: 662; Нарушение авторских прав?; Мы поможем в написании вашей работы!