КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Шаговые и моментные двигатели
|
|
|
|
Вопрос №6
Принцип действия шаговых двигателей. В схемах автоматики, телемеханики и вычислительной техники наряду с автоматическими системами непрерывного действия, которые выполняются с помощью рассмотренных выше обычных двигателей, широко применяются системы дискретного (импульсного) действия. В таких системах используются специальные исполнительные двигатели, которые получили название шаговых.
Шаговые двигатели — это электромеханические устройства, которые преобразуют электрические импульсы напряжения управления в дискретные (скачкообразные) угловые и линейные перемещения ротора с возможной его фиксацией в нужных положениях.
Первые шаговые двигатели изготовлялись в виде электромагнита, приводящего во вращение храповое колесо (рис.41), которое за одно включение электромагнита под напряжение (за один такт) перемещалось на вполне определенный угол — шаг, величина которого определяется величиной зубцового шага храпового колеса.
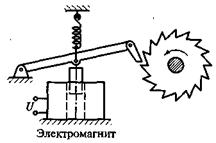
Рис.41. Шаговый двигатель с электромагнитом и храповиком
Для обеспечения реверса на валу двигателя устанавливалось два храповых колеса, повернутых на 180° друг относительно друга, и двигатель снабжался двумя электромагнитами. Несмотря на наличие ряда недостатков храповых шаговых двигателей, они и в настоящее время находят довольно широкое применение в схемах автоматики.
Шаговый двигатель (ШД) обычно состоит из трех автономно работающих секций 1, 2, 3 (рис. 42), каждая из которых включает неподвижный статор с обмоткой и ротор, причем роторы всех секций жестко закреплены на валу ШД. Ротор и статор ШД имеют полюсы (выступы), причем полюсы статоров секций совмещены, а полюсы роторов смещены относительно друг друга на 1/3 шага полюсов так, что если полюсы ротора первой секции совпадают с полюсами статора, то полюсы ротора второй секции сдвинуты относительно полюсов статора на 1/3 шага, а полюсы ротора третьей секции — на 2/3 шага.
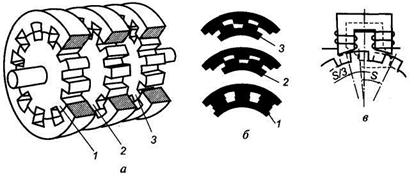
Рис. 42. Схема работы шагового электродвигателя:
а — общая схема; б — положения секций статора и ротора; в — схема прохождения магнитного потока
При подаче импульса напряжения на обмотку статора одной из секций ротор этой секции стремится принять положение наибольшей проводимости магнитного потока в магнитной цепи статор-ротор, что вызывает совмещение полюсов ротора и статора этой секции и поворот вала ШД. Угол поворота Δφ определяется числом полюсов N (измеряется в градусах):
Δφ 360/3N
При подаче импульса на следующую обмотку вал ШД повернется еще на Δφ и т.д. Подача импульсов напряжения на обмотки секции в требуемой последовательности и с нужной частотой выполняется электронным коммутатором.
Применение ШД целесообразно, когда требуется прерывистое стартстопное вращение с точным позиционированием (например при управлении заслонками или золотниками) или когда требуется вращение вала с заданной скоростью (например, в приводе подач станка с ЧПУ). В последнем случае управляющее воздействие на ШД имеет вид последовательности импульсов, частота которых и задает скорость вращения, а инерционность механических узлов привода подач делает вращение плавным.
Важной характеристикой ШД является его разрешающая способность {приемистость), т.е. та частота прихода управляющих импульсов, начиная с которой ШД теряет способность надежно отрабатывать каждый поступающий импульс. Например, при необходимости изменения направления вращения изменение порядка прихода импульсов на обмотки в силу инерции не вызовет мгновенного останова вала и его вращения в обратную сторону. Время, требуемое для останова и разгона вала, и определяет разрешающую способность ШД.
Разрешающая способность ШД, применяемых в приводах подач станков с ЧПУ, составляет порядка 2 кГц, хотя при плавном разгоне и равномерном движении частота уверенной отработки приходящих импульсов может достигать 8 кГц.
Единичный угол поворота ротора (на импульс) составляет от 0,5 до 10° и обычно равен (1,5 + 0,5)°. Ошибка поворота при единичном шаге может достигать 30%, однако она не накапливается, а компенсируется ошибками на следующих шагах.
Шаговые двигатели широко применяются в цифровых системах управления, так как могут управляться импульсами, поступающими непосредственно с логических схем системы без промежуточных преобразований. По сравнению с двигателями постоянного и переменного тока ШД точнее, проще, надежнее, компактнее, более устойчивы к внешним воздействиям. Однако они имеют меньший КПД и мощность (до 200 Вт) и не допускают длительных перегрузок.
Шаговые двигатели с пассивным ротором. Применяемые в настоящее время шаговые двигатели в большинстве являются многофазными и многополюсными синхронными электрическими машинами. В отличие от обычных синхронных двигателей роторы шаговых двигателей не имеют пусковой короткозамкнутой обмотки, что объясняется частотным (а не асинхронным) их пуском. Роторы двигателей могут быть возбужденными (активными) и невозбужденными (пассивными).
На рис. 19.2 изображены схемы работы m-фазного шагового двигателя. Для упрощения анализа физических процессов рассмотрим работу этого двигателя с простейшим невозбужденным ротором, имеющим два полюса.
Питание обмоток статора может быть либо однополярным, либо двухполярным. При однополярном питании напряжение изменяется от нуля до +U; при двухполярном — от +U до -U.
Современные электронные коммутаторы могут обеспечивать питание обмоток статора либо порознь, либо группами в различных сочетаниях. Каждому состоянию — такту коммутации, число которых зависит от способов включения обмоток, соответствует вполне определенные величина и направление вектора F результирующей МДС двигателя, а следовательно, и вполне определенное положение ротора в пространстве. Так, если обмотки двигателя питать поочередно (1, 2, 3,..., m) однополярными импульсами, то ротор двигателя будет иметь m устойчивых положений, которые совпадают с осями обмоток (см. рис.43, а). На практике с целью увеличения результирующей МДС статора, а следовательно, и магнитного потока, а также синхронизирующего момента обычно одновременно питают две, три и большее число обмоток. При этом ротор двигателя при холостом ходе занимает положения, в которых его ось совпадает с результирующим вектором МДС.
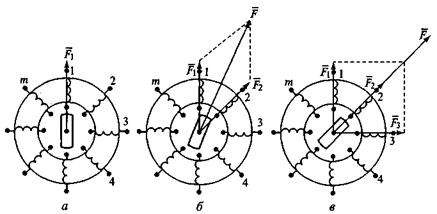
Рис.43. Схемы работы m -фазного шагового двигателя:
а — поочередное питание однополярными импульсами; б — питание четного числа обмоток; в — питание нечетного числа обмоток
В том случае, когда питается четное число обмоток, положения результатирующего вектора МДС и ненагруженного ротора совпадают с линией, проходящей между двумя средними обмотками (см. рис.43, б). В том случае, когда питается нечетное число обмоток, устойчивые положения ротора совпадают с осью средней обмотки (см. рис.43, в). Таким образом, в обоих случаях (при четном и нечетном числе питаемых обмоток) ротор двигателя будет иметь т устойчивых положений. Однако соседние положения в этих случаях будут смещены на угол 2π/(2m) = π /m.
Если поочередно включать то четное, то нечетное число обмоток (например, 1 — 2, 1—2—3, 2 — 3,
2 — 3 — 4 и т.д.), то число устойчивых положений ротора п увеличится вдвое: n = 2m.
На практике управление двигателя, при котором обмотки включаются поочередно равными группами по две, три и т.д., называют симметричным. Поочередное включение неравных групп обмоток называют несимметричным управлением.
Кроме однополярного и двухполярного, симметричного и несимметричного способов управления шаговыми двигателями различают еще потенциальный и импульсный способы управления.
При потенциальном управлении напряжения на обмотках изменяются только в момент поступления управляющего сигнала — команды. При отсутствии последующего сигнала управления одна обмотка или группа обмоток, возбужденные предшествующим сигналом, остаются под напряжением и ротор занимает вполне определенное фиксированное положение.
При импульсном управлении любая обмотка (или группа обмоток), возбужденная сигналом — импульсом управления, по истечении некоторого времени, определяемого длительностью импульса, автоматически обесточивается. Фиксация положения ротора в период паузы между импульсами обеспечивается либо внутренним реактивным моментом (при наличии активного ротора), либо специальными магнитными, электромагнитными или механическими фиксирующими устройствами.
На рис.44 показан принцип работы двухфазного шагового двигателя типа ШД-2-1. Обмотки этого двигателя имеют выводы средних точек, что приводит к их расщеплению на две полуфазы и превращает двигатель из двухфазного в четырехфазный. В отличие от двигателей с обычной двухфазной обмоткой, управление которыми должно осуществляться разнополярными импульсами, управление рассматриваемого двигателя осуществляется однополярными импульсами, что значительно упрощает коммутатор.
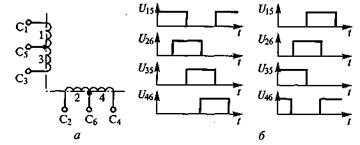
Рис.44. Схема обмоток (а) и порядок коммутации (б) шагового двигателя типа ШД-2-1
Шаговые двигатели с активным ротором. Шаговые двигатели по существу являются синхронными двигателями, работающими в несколько иных (необычных) режимах. Последнее накладывает отпечаток на их конструктивное исполнение. В отличие от обычных синхронных двигателей они для обеспечения нужных динамических и статических характеристик имеют минимальные диаметры ротора, выполняются без пусковой короткозамкнутой обмотки, рассчитываются на большие электромагнитные нагрузки и т. п. В настоящее время известно множество конструктивных форм шаговых двигателей.
По числу фаз (обмоток управления) шаговые двигатели можно разделить на однофазные, двухфазные и многофазные.
По типу роторов — на активные (возбужденные) и пассивные (невозбужденные). Активные шаговые двигатели можно в свою очередь разделить на двигатели с постоянными магнитами (магнитоэлектрические) и двигатели с обмотками возбуждения (электромагнитные), а пассивные — на индукторные и реактивные.
По числу пакетов стали магнитопровода двигатели делятся на однопакетные, двухпакетные и многопакетные.
По способу фиксации ротора при обесточенных обмотках управления различают двигатели с внутренней и внешней фиксацией.
Шаговые двигатели можно разделить на группы также по типу магнитной системы и другим признакам.
Описание всех конструкций шаговых двигателей, применяемых в настоящее время на практике, весьма затруднительно, поэтому далее рассматриваются лишь некоторые наиболее типичные из них.
Однопакетные шаговые двигатели с активным ротором по своей конструкции (рис.45) мало отличаются от обычных синхронных двигателей. Их роторы чаще возбуждаются постоянными магнитами, реже — обмоткой возбуждения постоянного тока. Роторы имеют явно выраженные полюсы. С целью уменьшения шага их изготовляют многополюсными в виде магнитов-звездочек. Малые диаметры не позволяют значительно увеличить число полюсов, что приводит к сравнительно крупному шагу таких двигателей, который обычно находится в пределах от 15 до 90°. Уменьшение шага у этих двигателей возможно лишь за счет увеличения числа фаз статора и тактов коммутации. Стремление уменьшить шаг приводит к тому, что обмотки статора обычно выполняются с минимальным числом пазов, приходящихся на полюс и фазу q = 1.

Рис.45. Шаговый двигатель типа ЩЦ-2 с активным ротором в виде магнита-звездочки
Двигатели, от которых не требуется фиксации ротора в обесточенном состоянии, обычно изготовляются со скосом пазов статора. Последнее способствует устранению зубцовых гармоник в кривой момента М=f(θ).
При необходимости фиксации ротора в обесточенном состоянии статоры изготовляются без скоса пазов. Для увеличения фиксирующего момента пазы статора обычно имеют значительные прорези. Наличие такой внутренней фиксации ротора, не требующей конструктивных усложнений и дополнительной мощности извне, является несомненным достоинством магнитоэлектрических шаговых двигателей. Для обеспечения минимального зазора шаговые двигатели часто имеют сквозную конструкцию. Выпускается несколько серий шаговых двигателей с активным ротором — ДШ-А, ШДА, ШДА-3, ДША и др.
Кроме однопакетных шаговых двигателей с активным ротором на практике можно встретить двух-, трех- и многопакетные двигатели. У двухпакетного двигателя в одном корпусе имеется два совершенно одинаковых пакета стали ротора с одинаковыми обмотками. Пакеты стали смещены в пространстве, на половину зубцового деления, что обеспечивает соответствующий сдвиг обмоток в пространстве и расширяет возможности двигателя — ведет к уменьшению шага без увеличения диаметра ротора и т.п. Оба ротора-звездочки располагаются на одном валу и не имеют пространственного сдвига, т. е. оси их полюсов совпадают.
Иногда для индикаторных целей (работы практически без момента сопротивления) применяются гистерезисные шаговые двигатели, у которых ротор не имеет явно выраженных полюсов и возбуждается полем статора. Шаг таких двигателей определяется числом пазов статора.
Индукторные шаговые двигатели. Шаговые двигатели индукторного типа имеют следующие отличительные признаки. Пакеты их статоров и роторов изготовляются из листов магнитомягкой электротехнической стали. Пазы ротора открытые. Ротор пассивный. Статор имеет два вида пазов: большие полузакрытые, в которых размещается обмотка, и малые открытые, выполняемые на зубцах, образуемых большими пазами (рис.46). Совокупность открытых пазов статора, расположенных на одном большом зубце, называется гребенчатой зоной. Число пазов статора и ротора и их геометрические размеры выбираются такими, чтобы обеспечить необходимый шаг и достаточный синхронизирующий момент при заданном виде коммутации токов.
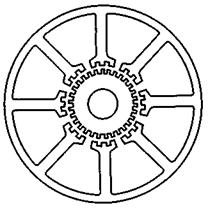
Рис.46. Листы стали статора и ротора шагового двигателя индукторного типа
Основной особенностью индукторных двигателей является то, что магнитный поток в их воздушном зазоре при работе двигателя содержит постоянную и переменную составляющие. Постоянная составляющая потока возбуждается либо постоянной составляющей тока обмоток управления — у двигателей с самовозбуждением, либо специальной обмоткой возбуждения — у двигателей с независимым возбуждением, либо постоянными магнитами — у магнитоэлектрических двигателей.
Переменная составляющая магнитного поля, вращающегося в пространстве в соответствии с частотой тактов коммутации, создается импульсами тока обмоток управления, поступающими от электронного коммутатора.
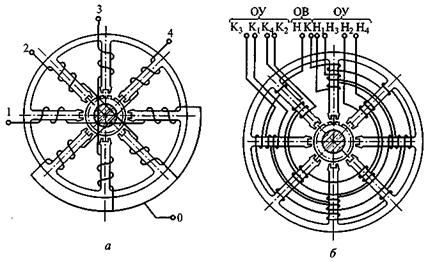
Рис.47. Схемы четырехфазных шаговых двигателей индукторного типа с самовозбуждением (а) и с независимым возбуждением (б)
На рис.47, а представлена схема четырехфазного индукторного шагового двигателя с самовозбуждением. Здесь постоянная составляющая магнитного потока в воздушном зазоре создается непосредственно однополярными импульсами управления с помощью шунтирующих обмотки управления встречных диодов. Двигатели с самовозбуждением просты по устройству, не требуют сложного коммутатора. Благодаря ряду положительных качеств они получили широкое применение. Выпускается несколько серий таких двигателей: ШДР, ДШИ, РШД. Недостатком индукторных двигателей с самовозбуждением является отсутствие внутренней магнитной фиксации ротора при обеспеченных обмотках статора.
На рис.47, б изображена схема четырехфазного индукторного шагового двигателя с независимым электромагнитным возбуждением. Постоянный поток возбуждения здесь создается специальной обмоткой (ОВ), питаемой постоянным током, который минует коммутатор. Этот двигатель в отличие от предыдущего имеет внутреннюю магнитную фиксацию роторов при отсутствии токов в обмотках управления (ОУ). Буквами Н и К обозначены начала и концы обмоток ОВ и ОУ. Положительным качеством такого двигателя является также то, что ток возбуждения, минуя коммутатор управления, позволяет тем самым уменьшить его установленную мощность.
Шаговые реактивные двигатели. Шаговые реактивные двигатели, так же как и индукторные, имеют невозбужденный (пассивный) ротор (рис.48, а). Конструктивно они весьма схожи с индукторными двигателями, имеющими электромагнитное возбуждение, однако они не имеют обмоток возбуждения и постоянной составляющей магнитного потока в воздушном зазоре. По своим энергетическим показателям и величине синхронизирующего момента они уступают индукторным двигателям аналогичной конструкции. Одним из недостатков реактивных шаговых двигателей является отсутствие внутренней магнитной фиксации ротора при обесточенных обмотках статора.
Однофазные шаговые двигатели наряду с многофазными находят довольно широкое применение в приборах автоматики и вычислительной техники. Обычно они применяются там, где не требуется больших синхронизирующих моментов и высоких скоростей. Они просты по устройству и управлению, не требуют сложных коммутаторов и чаще всего имеют одно направление вращения (не имеют реверса). Главная трудность при создании однофазных двигателей состоит в получении пускового момента однонаправленного действия.
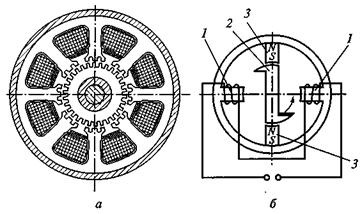
Рис.48. Схемы шаговых реактивных двигателей:
а — четырехфазного; б — однофазного двухполюсного; 1 — обмотки управления; 2 — ротор;
3 — постоянные магниты
На рис.48, б схематично представлен простейший однофазный шаговый двигатель, пусковой момент однонаправленного действия у которого создается с помощью клювообразных несимметричных полюсов. В обесточенном состоянии обмоток управления 1 ротор 2 удерживается постоянными магнитами 3 во вполне определенном положении. При подаче импульса управления ротор поворачивается в направлении, показанном стрелкой. При повороте ротора на 90° напряжение с обмоток управления снимается и ротор, продолжая вращаться под действием сил инерции, приходит в положение, соосное с полюсами постоянных магнитов.
Кроме рассмотренных конструкций в последнее время появился ряд новых шаговых двигателей: шаговые двигатели с катящимися и волновыми роторами, шаговые двигатели с печатными обмотками и др.
Моментные двигатели. В моментных двигателях ротор, развивая необходимый момент, поворачивается лишь на весьма малые углы, составляющие долю его оборота. Таким образом, двигатель работает практически с неподвижным ротором или, как говорят, в режиме короткого замыкания.
В качестве моментных могут быть использованы двигатели различного типа как постоянного, так и переменного токов. Например, у двигателя постоянного тока независимого возбуждения момент короткого замыкания пропорционален приложенному напряжению. У асинхронного двигателя (трехфазного или двухфазного) момент определяется квадратом напряжения в цепи статора, причем в двухфазном двигателе достаточно регулировать ток в одной обмотке (обмотке управления) и изменять момент за счет внесения асимметрии.
Наиболее рациональным является двухфазный синхронный двигатель с возбуждением от постоянного магнита и питанием обмотки статора постоянным током (рис.49), в котором изменяя соотношение токов от I1 = max, I2 = 0 до I1 = 0, I2 = max, можно обеспечить поворот ротора в пределах 90°. При I1 = max положение ротора будет совпадать с осью обмотки 1, при I2 = max — с осью обмотки 2.
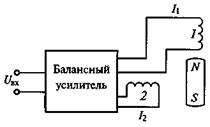
Рис.49. Схема моментного двигателя с двумя обмотками (1, 2)
Системы с моментными двигателями отличаются повышенным быстродействием. Поскольку двигатель не вращается, то его механическая инерция не влияет на динамику системы, а переходные процессы определяются в основном электромагнитной инерцией обмоток. Так как электромагнитная постоянная двигателя обычно существенно меньше электромеханической, то переходные процессы в них завершаются быстрее, чем при отработке перемещений.
Двигатели для микроперемещений. В приводах подачи прецизионных шлифовальных станков, приборов точной механики и оптики часто требуется отработка перемещений, составляющих несколько микрометров, а иногда и десятые доли микрометра. При использовании для этой цели шаговых двигателей как обладающих малым угловым шагом все же необходима механическая передача с большим передаточным отношением, которой свойственны существенные погрешности. Так как в перечисленных установках очень высоки точностные требования, то применение шаговых двигателей практически исключается. Частичным решением задачи может быть использование шаговых двигателей с электрическим дроблением шага, когда посредством специальной электронной схемы при подаче очередного импульса обеспечивается перемещение не на полный шаг, а только на его часть. По сути дела в этом случае от дискретного управления переходят к непрерывному. Однако и здесь не обойтись без механической передачи.
В связи с этим для микроперемещений необходимы двигатели, выполненные на иной физической основе. Принципиально возможно построение двигателей на основе теплового расширения тела, электромагнитного взаимодействия, магнитострикций, обратного пьезоэффекта.
Двигатели для микроперемещений, построенные на тепловом расширении тела, не используются из-за большой инерционности и отрицательного влияния температурных полей на окружающие приборы и узлы.
Двигатели, выполненные как втяжные или поворотные электромагнитные устройства, иногда находят применение, однако очень трудно в них обеспечить тяговое усилие, слабо зависящее от перемещения. Кроме того, такой двигатель весьма инерционен из-за большой индуктивности тяговой катушки. Полоса пропускания управляющего сигнала в нем составляет 10...20 Гц. Положительное качество двигателя — обеспечение достаточно больших перемещений, определяемых ходом электромагнита (ход может составлять несколько миллиметров). В большинстве случаев в прецизионных установках наряду с микроперемещениями необходимы и относительно большие котировочные подачи.
Более широко применяют магнитострикционные двигатели, в которых используется свойство стержня из ферромагнитного материала изменять длину под воздействием магнитного поля. Максимальное относительное изменение продольных размеров стержней из таких материалов, как никель, железоникелевые, железохромникелевые и железокобальтовые сплавы, сплавы типа инвар и другие, может составлять (20...50)·10-6. Следовательно, при длине 100 мм свободный конец стержня может перемещаться на 2... 5 мкм. Пороговая чувствительность составляет 0,05... 0,10 мкм. Недостаток магнитострикционного двигателя, так же как и электромагнитного, — инерционность, обусловленная процессами, происходящими в намагничивающей катушке. Однако индуктивность ее несколько меньше, так как зазора в магнитной цепи может не быть. Все же полоса пропускания и в этом случае не превышает 30 Гц. На точность работы двигателя существенно влияют внешнее тепловое поле и нагрев стержня. Следует иметь в виду, что намагничивающая катушка двигателя сама создает ощутимое тепловое поле, так как ее размеры и потребление энергии достаточно велики.
Наиболее предпочтителен пьезоэлектрический двигатель, выполняемый обычно как столбик из пьезокерамических шайб, склеенных между собой. Исходным материалом для пьезокерамики служат оксиды металлов (титанат бария, цирконат-титанат свинца и др.). Когда к торцевым поверхностям шайб приложено напряжение, то в зависимости от ориентации электрического поля столбик сжимается или удлиняется. В некоторых пределах зависимость удлинения от напряженности электрического поля носит линейный характер. Максимальное относительное удлинение может составлять (5...7)·10-4. Следовательно, пьезостолбик длиной 50 мм может обеспечить перемещение до 25 мкм, т. е. примерно на порядок больше, чем в магнитострикционных двигателях. Напряжение, подаваемое на шайбу, достаточно велико — до 300 В. Потребление энергии незначительно.
Существенное достоинство пьезоэлектрического двигателя — быстродействие. Полоса пропускания достигает 1000 Гц. К недостаткам как магнитострикционного, так и пьезоэлектрического двигателей относится наличие петли гистерезиса в характеристиках. Ширина петли может достигать 20...30 % максимального перемещения. В пьезоэлектрических двигателях влияние гистерезиса можно несколько ослабить предварительным сжатием столбика шайб.
Усилия, которые могут создавать магнитострикционный и пьезоэлектрический двигатели, естественно, зависят от размеров стержня и шайб и в реальных двигателях составляют несколько сотен ньютонов.
Часто максимальные перемещения, которые могут обеспечить магнитострикционный и пьезоэлектрический двигатели, недостаточны. Тогда приходится прибегать к шаговым двигателям, построенным на тех же принципах. Работу шагового пьезоэлектрического двигателя поясняет рис.50.
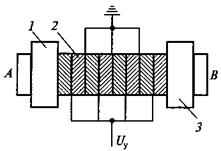
Рис.50. Схема шагового пьезоэлектрического двигателя:
1,3 — зажимные устройства; 2 — шайба пьезоэлектрическая
Двигатель состоит из столбика пьезоэлектрических шайб 2 и двух зажимных устройств 1 и 3 на его концах. При нормальной работе в непрерывном режиме зажимное устройство 3 зафиксировано, а устройство 1 свободно. В зависимости от напряжения, поданного на шайбы, осуществляются микроперемещения конца А. При использовании возможного ресурса перемещений и соответственно при достижении напряжением предельного значениям зажим 1 фиксирует конец А, напряжение с шайб снимается, а зажим 3 освобождает конец В. При этом столбик шайб сжимается до исходной длины (конец В подтягивается). После этого зажим 3 вновь фиксируется, а зажим 1 отпускает конец А; далее вновь подается напряжение на шайбы и двигатель начинает работать, перемещая конец А, соответственно управляя объектом, механически связанным с двигателем. Если одного шага перемещения оказывается недостаточно, то цикл повторяется. Зажимными устройствами управляют с помощью специального коммутатора. Для того чтобы зафиксировать конец столбика шайб, можно установить механические устройства (например, цанговые зажимы) с управлением от магнитов или тех же пьезокерамических элементов — шайб.
Шаговый магнитострикционный двигатель работает по тому же принципу.
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 8223; Нарушение авторских прав?; Мы поможем в написании вашей работы!