КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методы компенсации запаздывания
|
|
|
|
Лекция 18
Большинству процедур синтеза управляющих устройств для процессов с запаздыванием (исключая лишь те, которые связаны с оптимальными методами и о которых речь пойдет ниже в этом разделе) присуще использование прогнозирующего блока для компенсации запаздываний в контуре управления. В этом случае для синтеза регулятора можно применять стандартные процедуры. Имеются различные способы прогноза, которые можно применять для компенсации запаздываний по состояниям, выходам или управлениям, например какие-либо из рассмотренных статистически оптимальных алгоритмов прогноза, или значительно более простой прогнозатор Смита, хорошо зарекомендовавший себя при управлении процессами с запаздываниями по выходам и управлениям, или каскадное регулирование, компенсацию возмущений, компенсацию взаимодействий и т. д. Мы ограничимся лишь методами, ориентированными непосредственно на компенсацию запаздываний, сосредоточив внимание на недавних результатах по синтезу многомерных компенсаторов для случая процессов со многими запаздываниями.
Начнем с задачи синтеза компенсатора для одномерного процесса с запаздыванием. В конце 50-х годов был предложен так называемый прогнозатор Смита. Структурная схема соответствующей системы управления показана на рис. 1.
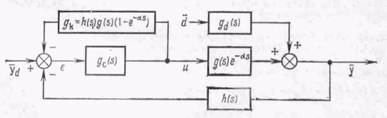
Рис.1. Одномерная система управления с прогнозатором Смита для объекта с (одним) запаздыванием.
Цель введения компенсатора с передаточной функцией
 (1)
(1)
(он называется прогнозатором Смита) — уничтожить запаздывание на время а в характеристическом уравнении замкнутой системы. Действительно, если компенсатор отсутствует
 , то выход замкнутой системы задается выражением
, то выход замкнутой системы задается выражением
 (2)
(2)
и соответствующее характеристическое уравнение содержит запаздывание на
 (3)
(3)
После введения прогнозатора Смита (1) выход замкнутой системы задается выражением

(4)
и соответствующее характеристическое уравнение уже не содержит запаздывания:
 (5)
(5)
таким образом, можно выбирать достаточно большие значения коэффициентов усиления, не опасаясь неустойчивости замкнутой системы.
В работе Мура и др. для прогноза состояния одномерной системы на интервал запаздывания использовалось аналитическое выражение решения соответствующего уравнения. Полученный прогнозатор был построен сначала для дискретного времени; поэтому он включал элементы, компенсирующие эффекты дискретизации, и элементы фиксации нулевого порядка. Можно показать, что прогнозаторы Смита и Мура эквивалентны
Для многомерных систем со многими запаздываниями задача синтеза регулятора с компенсацией запаздывания существенным образом усложняется. Рассмотрим многомерную систему в частотной области (1) — (3). Зависимость между m-мерным вектором управлений и l-мерным вектором выходов
и l-мерным вектором выходов \ задается передаточной матрицей G (s):
\ задается передаточной матрицей G (s):
 (1)
(1)
а зависимость между y(s) и n-мерным вектором возмущений d(s)— с помощью передаточной функции Gd(s):
 (2)
(2)
при этом передаточные матрицы имеют вид
 (6)
(6)
Во многих практических задачах, особенно если передаточные функции восстанавливаются по результатам экспериментов, G(s) и Gd{s) обычно имеют простой вид [см. уравнение (2)]. Однако возможны и более сложные передаточные функции.
Рассмотрим систему регулирования, блок-схема которой показана на рис. 2. Пусть Gc — передаточная функция регулятора, Н — передаточная функция измерительного устройства, а pa(s) — уставка. Выход замкнутой системы задается выражением.
 (7)
(7)
При наличии запаздываний в системе выбор закона регулирования гораздо более ограничен по сравнению с рассмотренным выше случаем систем без запаздывания; поэтому целесообразно принять следующую методику синтеза регулятора: сначала каким-либо образом построить блок компенсации запаздываний или прогнозатор, а затем воспользоваться одним из стандартных приемов. Соответствующий многомерный блок компенсации можно строить как в непрерывной, так и в дискретной форме.
t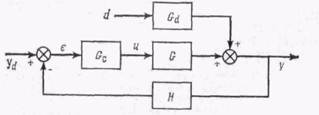
Рис. 2. Блок-схема обыкновенной системы регулирования для многомерного объекта управления.
Как было отмечено выше, имеется много способов представления систем с запаздываниями. Так, в случае линейной системы с постоянными запаздываниями наиболее общее представление во временной области имеет вид
!,  (8)
(8)
(9)

где х — n-мерный вектор состояний;  - постоянные запаздывания.
- постоянные запаздывания.
Соответствующее представление в частотной области получим, беря преобразование Лапласа от (8), (9):
 (10)
(10)
где
 (11)
(11)
 (12)
(12)
Отметим, что передаточные функции (11), (12) имеют гораздо более сложный вид, чем обычно бывает в реальных задачах. Это характерно для тех сравнительно редких на практике случаев, когда модель объекта управления с самого начала задается в виде системы дифференциальных уравнений и нет необходимости восстанавливать ее по результатам экспериментов.
Оказывается, что для многомерных систем с запаздыванием можно построить компенсатор, аналогичный прогнозатору Смита и приводящий к тому, что запаздывающие члены в характеристическом уравнении замкнутой системы исчезают. Однако в отличие от одномерной задачи, где синтез компенсатора сводится к прогнозу выхода на время запаздывания, в многомерном случае компенсация связана с прогнозом некоторых «фиктивных» переменных состояния в заданные моменты времени. Структура многомерной системы с запаздываниями, охваченной обратной связью с компенсатором в контуре регулирования, изображена на рис. 2. Заметим, что эта структура аналогична рассмотренному выше одномерному случаю, т. е. собственно регулятору Смита. Передаточную функцию компенсатора Ок можно выбирать разными способами
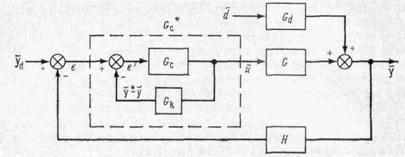
Рис. 2. Блок-схема системы регулирования с компенсатором запаздываний для многомерного объекта управления.
Покажем, что при
 (13)
(13)
(где — соответствующие Н и G передаточные функции
— соответствующие Н и G передаточные функции
без запаздываний) устраняется запаздывание по выходам и запаздывание в характеристическом уравнении замкнутой системы. Найдем передаточную функцию внутреннего контура G* на схеме рис. 2. Имеем  или
или
 (14)
(14)
Полная передаточная функция системы в этом случае задается выражением
 (15)
(15)
Покажем, что многомерный компенсатор (13) позволяет устранить запаздывание в характеристическом уравнении замкнутой системы (15). Постановка дает
 (16)
(16)
где  (17)
(17)
Если G — квадратная невырожденная матрица1), то, воспользовавшись леммой об обращении матриц, получим


Из выражения (16) следует соотношение
 . Подставив выражения для
. Подставив выражения для и для
и для в (17), найдем
в (17), найдем
 (18)
(18)
Устойчивость замкнутой системы определяется корнями характеристического уравнения
 .(19)
.(19)
Как видно из (19), членов с запаздыванием в характеристическом уравнении уже нет, и, стало быть, запаздывания не влияют на устойчивость замкнутой системы. Это верно, однако, лишь в том случае, когда модель управляемого процесса абсолютно адекватна ему. На практике, конечно, этого достичь не удается и всегда остается некоторая неточность — ошибка аппроксимации объекта выбранной моделью; поэтому компенсация запаздываний не является полной, и при настройке параметров регулятора приходится соблюдать некоторую осторожность. Несмотря на это, качество регулирования в системе с компенсацией запаздываний оказывается значительно более высоким, чем без нее.
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 1565; Нарушение авторских прав?; Мы поможем в написании вашей работы!