КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Двигателей
|
|
|
|
Отмеченные выше преимущества двигателей постоянного тока (хорошие регулировочные свойства, большой пусковой момент и др.) сопровождаются такими недостатками, как малый срок службы, повышенная чувствительность к воздействиям окружающей среды, образование щеточной пыли и т. п. Эти недостатки связаны с наличием контакта в щеточно-коллекторном узле. Достижения полупроводниковой техники позволили создать двигатель, в котором щеточно-коллекторный узел заменен бесконтактным переключателем (коммутатором) на транзисторах, работающих в ключевом режиме. Такие двигатели получили название вентильных или бесконтактных двигателей постоянного тока. Как правило, бесконтактный двигатель постоянного тока (БДПТ) имеет инверсное исполнение, т. е. обмотку якоря располагают в пазах статора, а ротор представляет собой постоянный магнит с одной или двумя парами полюсов. Принцип действия такого двигателя удобно пояснить на схеме рис.2.20. Обмотка якоря подключена к мостовой схеме на транзисторах T1-T4, управляемой датчиком положения ротора 3.
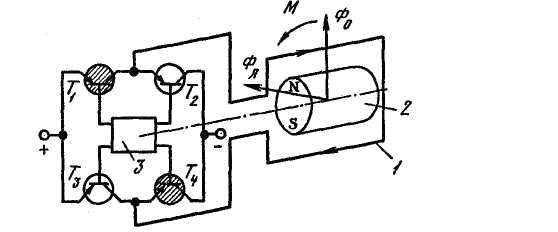
Рис.2.20. К пояснению принципа работы вентильного двигателя:
1 — секция обмотки якоря; 2 — ротор; 3 — датчик положения ротора.
Пусть Т1 и Т4 открыты, а Т2 и T3 заперты и от источника постоянного тока по витку (секции) течет ток, создающий (по правилу буравчика) магнитный поток якоря ФЯ. Предположим, что ротор находится в положении, когда вектор его основного потока Ф0, являющегося потоком возбуждения, направлен вверх (рис.2.20). При таком расположении векторов магнитных потоков на ротор действует вращающий момент М и ротор стремится повернуться так, чтобы потоки Ф0 и ФЯ были направлены в одну сторону. Если в такой момент времени ДПР переключит транзисторы, открыв Т2 и Т3 и закрыв T1 и Т4, то ток в витке изменится на противоположный, изменив направление вектора потока Ф я на 180°. При этом ротор, повернувшись по инерции против часовой стрелки, продолжает вращаться за счет вращающего момента М, образованного потоками ФЯ и Ф0, имеющими новое направление. Когда вращающийся ротор достигнет положения, когда поток Ф0 вновь совпадет по направлению с потоком ФЯ, ДПР (подобно полукольцам коллектора) переключит ток в обмотке на прежнее направление и ротор будет продолжать вращаться в ту же сторону. Очевидны серьезные недостатки такого устройства: неравномерность вращающего момента из-за скачкообразного изменения потока ФЯ на 180°, возможность остановки ротора или отсутствие пускового момента, а также неопределенность направления вращения ротора. Радикальным способом устранения этих недостатков, является переход на многосекционную обмотку. Однако это связано с увеличением числа транзисторов и усложнением схемы. Компромиссным решением является введение трехсекционной обмотки с коммутатором на шести транзисторах (рис. 2.21).
Обмотка статора 1 представляет собой трехфазную обмотку, соединенную звездой (треугольником), подобно обмоткам асинхронных или синхронных машин. Ротор 2 выполнен из постоянного магнита (в общем случае ротор может быть возбужден электромагнитом). Изображенный двигатель имеет одну пару полюсов (имеются двигатели с двумя и тремя парами полюсов).
Транзисторный коммутатор представляет собой управляемый инвертор, подающий напряжение к фазным обмоткам А, В и С статора в зависимости от сигналов, поступающих с датчика ДПР, который в общем случае может быть трансформаторным, емкостным, оптическим или другим позиционным датчиком. На рис.2.21 изображен трансформаторный ДПР. Первичные обмотки 3 ДПР соединены последовательно (на рис. 2.21 эти соединения не показаны) и к ним подведено переменное напряжение частотой 5-30 кГц от вспомогательного маломощного генератора, выполненного в одном блоке с коммутатором. Это напряжение трансформируется во вторичные обмотки ДПР, однако величина ЭДС в них изменяется в зависимости от угла поворота сердечника 4, жестко закрепленного на роторе 2. Сердечник 4 представляет собой сектор из магнитомягкого материала. Во вторичных обмотках, магнитные цепи которых в данный момент замкнуты через магнитный сектор, наводится значительная ЭДС. В положении, изображенном на рис.2.21, такая ЭДС наводится в обмотках а,b',с ДПР. В других вторичных обмотках (а',b,с') наводится лишь небольшая ЭДС помехи. Транзисторы коммутатора работают в ключевом режиме.
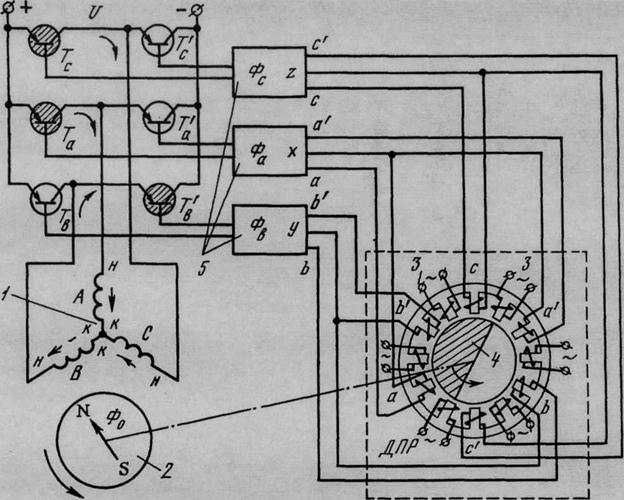
Рис. 2.21. Схема расположения обмоток якоря, датчика положения ротора и силовых транзисторов вентильного двигателя серии МБ
ЭДС с обмоток а,b,с датчика поступают на одноименные входы формирователей 5, в которых высокочастотный сигнал преобразуется в импульсы, отпирающие соответствующие транзисторы коммутатора.
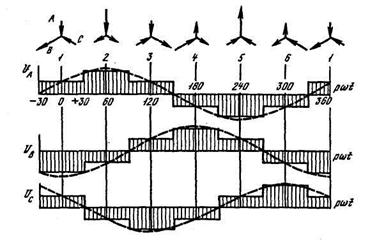
Рис. 2.22. Зависимости напряжений на фазных обмотках от времени
На рис. 2.21 открытые транзисторы Та, Т'b, Тс заштрихованы и через них к обмоткам статора подведено напряжение питания сети постоянного тока. При этом на обмотках А и С выделяется одна треть напряжения питания U (ввиду их параллельного соединения между собой и последовательного соединения с обмоткой В), а на обмотке В - две трети подводимого напряжения U. Стрелки у обмоток «обозначают» направление приложенных к обмоткам векторов напряжений, а их длина - относительное значение модулей этих напряжений. Если принять за положительное напряжение, приложенное плюсом к началу “н” обмотки, то положению ротора на рис. 2.21 соответствует положение 1 векторов напряжений на рис. 2.22.
При повороте ротора 2 (рис.2.21) и сектора 4 ДПР в направлении стрелки на 30 эл. град транзистор Тс закроется сигналом, поступающим с ДПР, а транзистор Т'с откроется. Напряжение U перераспределится между обмотками так, как показано на рис. 2.22 (положение 2). Такое перераспределение происходит при повороте сектора 4 на каждые 60°, которым соответствуют положения 1—2 — 3 — 4 — 5 — 6 — 1 на рис.2.22. Нетрудно видеть, что первые гармоники напряжений на обмотках статора, показанные штриховыми линиями на этом рисунке, образуют трехфазную систему, а, следовательно, обмотка статора создает вращающееся магнитное поле, в котором синхронно с частотой коммутатора вращается ротор. Таким образом, рассматриваемый вентильный двигатель по принципу действия близок к синхронному двигателю.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 405; Нарушение авторских прав?; Мы поможем в написании вашей работы!
