КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Форма шин
|
|
|
|
На практиці використовують шини прямокутного, круглого, квадратного і коритоподібного перетину.
Шини прямокутного перерізу (рис. 4.1,а) випускають у вигляді смуг розмірами від h = 15 × b = 3 мм2 до 120 × 10 мм2. Останні допускають тривале протікання змінного струму до 2000 А. Такі властивості шин прямокутного перерізу як легке зчленування з електричними апаратами і між собою, хороші умови охолодження, достатня механічна міцність при електродинамічних діях струмів КЗ і невисоке значення коефіцієнта поверхневого ефекту зумовили практично повсюдне їх використання в електроустановкахнапругою до 35 кВ і з струмом до 2000 А.
При великих струмах можна використовувати пакети, складені з двох або трьох паралельних шин на кожну фазу. Однак такі складені шини знаходять все менше застосування через складність монтажу, недостатньої механічної міцності при великих струмах КЗ, більш високого значення коефіцієнта поверхневого ефекту і необхідності застосування через певні відстані прокладок між смугами шин. Прокладки виключають можливість злипання смуг однієї фази при КЗ.
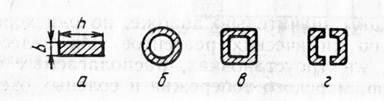
Рис. 4.1. Електричні шини прямокутного (а), круглого (б), квадратного (в) і коритоподібного (г) перетину
Шини квадратного і коритоподібного перетину (рис. 4.1,в,г) позбавлені ряду названих недоліків складових шин і більш ефектно використовують матеріал провідника, допускаючи більшу щільність струму. Крім того, шини такого перетину володіють більшою механічною міцністю на вигин.
Шини круглого перетину (рис. 4.1,б) широко використовуються в установках 110 кВ і вище. Така форма шин дозволяє уникнути підвищеної напруженості електричного поля на різких вигинах поверхні провідника, рівномірно розподіляючи електричне поле. У місцях високої напруженості поля відбувається посилена іонізація повітря і можуть виникати коронні розряди, що знижують електричну міцність повітря. З цієї причини можливі перекриття ізоляторів і пробою між фазами.
4.3. Матеріал шин
Матеріал, з якого виготовляють шини, повинен володіти достатньою електричною провідністю і механічною міцністю, щоб протистояти електродинамічним силам, що виникають в шинах при струмах КЗ. Таким матеріалом може бути алюміній, мідь чи сталь.
Алюмінієві шини мають досить хорошу провідність, що в сукупності з невисокою вартістю і легкістю алюмінію зумовило їх практично повсюдне використання.
Мідні шини значно дорожчі, але вони добре протистоять дії хімічних реагентів. Їх доцільно використовувати в електроустановках, розташованих поблизу хімічних заводів, морського узбережжя і солоних озер.
Сталеві шини мають значно гіршу провідність, при змінному струмі в них мають місце втрати на вихрові струми і гістерезис. Однак завдяки дешевизні, великій механічній міцності і меншої дефіцитності, стальні шини можна використовувати в електроустановках з струмами до 325 А.
4.4. Електродинамічні сили в шинах
Відомо, що якщо по двох паралельних провідниках протікають струми i1 і i2, то між ними виникає електродинамічна сила Fд, яка намагається їх зблизити (якщо напрямки струмів збігаються) або відштовхнути (якщо струми спрямовані протилежно) (рис. 4.2).
Погонні зусилля, що виникають в цих провідниках, визначаються наступним виразом:
Fо =(2/ а) kф i1 i2 10-7, (4.1)
де Fо – сила, прикладена до кожного метру провідника, Н;
а – відстань між центрами провідників; kф – коефіцієнт, що враховує прямокутну форму шин і залежить від їх розмірів і відстані а; i1 і i2 – значення струмів в провідниках, А.
На рис 4.3 наведені залежності коефіцієнта kф від розмірів і розташування шин. Як видно з графіка, якщо має місце співвідношення
a-b > 2 (h + b), (4.2)
то можна з достатньою точністю прийняти kф = 1.
Рис. 4.2. Електродинамічна Рис. 4.3. Залежність коефіцієнта kф
взаємодія двох провідників від розмірів і розташування шин
зі струмом
При протіканні трифазного змінного струму по трьом шинам, розташованим в одній площині (рис. 4.4), найбільше зусилля буде докладено до середньої шини в момент проходження ударного струму iуд. Значення цієї електродинамічної сили Fд буде залежати від відстані між точками кріплення шин l і визначається виразом
F д(3) = 1,76(iуд (3)) 2 kф (l / a)10 - 7. (4.3)
Виникаючі в шинах сили намагаються їх зблизити (відштовхнути), чому перешкоджає кріплення шин до нерухомих опорних ізоляторів. Шини згинаються, і в їх матеріалі виникає механічне напруження σ, розрахункове значення якого можна визначити за формулою
σрозр = M/W (4.4)
де М – згинальний момент; W – момент опору вигину.
Згинальний момент М залежить від плеча прикладання сили l і дорівнює
М = F д(3) (l /10) (4.5)
Момент опору вигину дорівнює
 /6 або
/6 або  /6. (4.6)
/6. (4.6)
Перша формула справедлива при розташуванні шин плазом в одній площині (рис. 4.4), друга – при розташуванні їх на ребро (рис. 4.7,б).
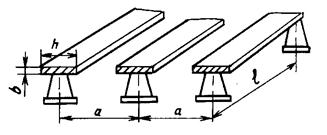
Рис. 4.4. Розташування шин плазом в одній площині
Шини витримають електродинамічну дію струму КЗ, якщо розрахункове значення σрозр буде не більше допустимого σдоп, рівного 70% напруги руйнування матеріалу σруйн:
σрозр ≤ σдоп =0,7 σруйн. (4.7)
Значення допустимої напруги на вигин в різних матеріалах наведено в табл. 4.1.
Таблиця 4.1
Допустимі напруги на вигин
| Матеріал | σдоп, МПа |
| Алюміній АТ | |
| Алюміній АТТ | |
| Мідь МТ | |
| Сталь |
В аварійних випадках при виникненні КЗ в мережі збільшення струму відповідно збільшує електродинамічні сили, які намагаються деформувати як струмоведучі частини електричних апаратів, так і ізолятори, якими ці частини прикріплені до заземлених елементів електричних установок. Щоб бути цілком впевненим у спроможності електричного апарата протистояти руйнівній дії електродинамічних сил, необхідно вміти розраховувати механічні напруження, створені цими силами у матеріалах апарата.
Електродинамічною стійкістю апарата називають його спроможність протистояти дії електродинамічних сил, які утворюються при протіканні через апарат струмів КЗ. Електродинамічна стійкість характеризується найбільшим струмом, який апарат може витримати без пошкодження (умова ідин ≥ іу д ).
Наприклад, якщо електричний апарат має електродинамічну стійкість 50 кА, то це означає, що цей апарат здатний витримати без негативних наслідків, що перешкоджають його подальшій роботі, такі механічні напруження, які виникають в ньому при проходженні через апарат струму КЗ, не більше 50 кА.
Значення електродинамічної стійкості апаратів наводиться в довідниках або технічних паспортах у вигляді одного із наступних параметрів:
а) струму електродинамічної стійкості і дин – максимального амплітудного значення струму, при якому механічні напруження, що виникають в елементах апарата, не виходять за межі допустимих значень;
б) електродинамічної кратності відносно номінального струму:
 ;
;
в) діючого значення струму електродинамічної стійкості І дин, що оцінюється за перший період струму КЗ.
І дин, що оцінюється за перший період струму КЗ.
4.5. Нагрівання шин
Для забезпечення надійної тривалої роботи контактів в шинах і виключення надмірного нагрівання ізольованих частин апаратів, до яких примикають шини, температура алюмінієвих шин в закритих РУ не повинна перевищувати тривало допустимого значення υтр.доп=70 оС. При протіканні струмів КЗ допустимо короткочасний нагрів алюмінієвих шин до температури υдоп =200 оС, мідних – до 300 оС, сталевих – до 400 оС.
Кінцева температура нагріву шини при протіканні струму КЗ в інженерній практиці визначається за допомогою кривих, наведених на рис. 4.5. При цьому враховуючи, що збірні шини вибираються з певним запасом по допустимому струму, необхідно уточнити їх початкову температуру υпоч, викликану протіканням робочого струму навантаження I роб ..
υпоч = υо + (υтр.доп - υном)(Iроб /Iтр.доп)2. (4.8)
де I тр.доп – тривало допустимий струм шини; υном – номінальна температура навколишнього повітря, рівна 25оС; υтр.доп – тривало допустима температура нагріву шин; υо – середньорічна температура.
Відкладаючи отримані значення υпоч на ординаті графіка рис. 4.5 і використовуючи потрібну криву, знаходимо на осі абсцис відповідну точку Апоч. Додамо до цієї величини значення щільності теплового імпульсу Δ А
Δ А= I∞ 2· tп /s2, (4.9)
де I∞ – усталене значення струму КЗ, кА; s – переріз шин, мм2; tп – приведений час дії струму КЗ (визначення величини tп розглянуто далі в прикладі 1).
Отримаємо на абсцисі величину А кін, за допомогою якої на тій же кривій знаходимо кінцеву температуру нагрівання шин струмом КЗ υкін. Для правильно вибраних шин має дотримуватися умова
υкін ≤ υдоп. (4.10)
Струми КЗ можуть у десятки, а в деяких випадках і в сотні разів перевищувати струми довготривалого режиму, і тільки наявність захисних пристроїв, що обмежують тривалість протікання струмів КЗ кількома секундами, рятує апарати від недопустимого перегрівання. При надмірному перевищенні температури провідників та частин апаратів можливе розм’якшення і плавлення металу, випалювання ізоляції, руйнування контактів і інші пошкодження.
Здатність апарата протистояти тепловій дії струму КЗ називається термічною стійкістю.
В інженерній практиці електричні апарати перевіряють на термічну стійкість за таким виразом
 , (4.11)
, (4.11)
де  і
і  – значення струму та часу термічної стійкості, які подаються в довідковій літературі для конкретного типу апарата (величини бувають 1; 3; 5; та 10 с);
– значення струму та часу термічної стійкості, які подаються в довідковій літературі для конкретного типу апарата (величини бувають 1; 3; 5; та 10 с);  – значення можливого струму КЗ в схемі застосування апарата;
– значення можливого струму КЗ в схемі застосування апарата;  – час вимикання струму КЗ.
– час вимикання струму КЗ.
Іноді термічна стійкість задається коефіцієнтом термічної стійкості
 .
.
4.6. З'єднання шин
При подовженні шин, виконанні відводів для приєднання фідерів і апаратів шини необхідно з'єднувати між собою. На практиці використовуються наступні способи з'єднання прямокутних шин:
Внакладку наскрізними болтами – найбільш простий спосіб з'єднання шин. Залежно від ширини шини застосовують два болти, що розташовуються по діагоналі, або чотири болти (рис. 4.6, а).
Основний недолік болтових з'єднань – ослаблення з часом сили натягу контактних поверхонь, збільшення перехідного опору і, як наслідок, перегрів місця контактування. Зменшення сили притиснення викликано розходженням коефіцієнтів лінійного розширення алюмінієвих (мідних) шин і сталевих болтів. Так, зі збільшенням температури алюміній під болтовим з'єднанням розширюється більш інтенсивно, що призводить до його механічної деформації (зминанню). Зминання викликає зменшення тиску в контакті при подальшому зниженні температури. Суттєвому зростанню перехідного опору сприяє і волога, проникаючи в ослаблені з'єднання і посилюючи процеси окислення. Тому болтові з'єднання шин вимагають постійної уваги і систематичної підтяжки при експлуатації.
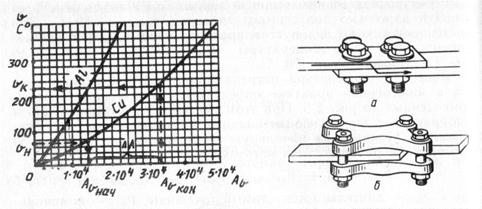
Рис. 4.5. Криві для визначення кінцевої Рис. 4.6. З’єднання прямокутних
температури шин при струмах КЗ шин наскрізними болтами (а) і з допомогою накладок (б)
З'єднання за допомогою стискаючих накладок (рис. 4.6, б) не вимагає попередньої розмітки і свердління отворів. Воно володіє великою механічною міцністю і меншим перехідним опором. Такому з'єднанню в меншій мірі притаманні недоліки болтового з'єднання.
З'єднання зварюванням найбільш надійний і дешевий вид з'єднання, що забезпечує сталість перехідного опору. Освоєння процесу зварювання алюмінію під флюсом дозволило широко використовувати цей спосіб з'єднання, що не вимагає постійного контролю при експлуатації.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 992; Нарушение авторских прав?; Мы поможем в написании вашей работы!