КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип действия и основные свойства шагового двигателя
|
|
|
|
Классификация шаговых двигателей
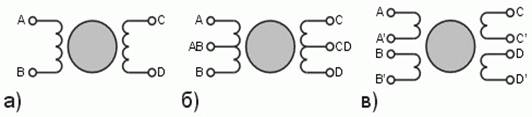
В зависимости от конфигурации обмоток двигатели делятся:
1. Биполярный - имеет четыре выхода, содержит в себе две обмотки(а).
2. Униполярный - имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины (б).
3. Четырехобмоточный - имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены (в).
В зависимости от типа электронного коммутатора управление шаговым двигателем может быть: однополярным или разнополярным; симметричным или несимметричным; ·потенциальным или импульсным. При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U. Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.
Принцип получения дискретного перемещения ротора рассмотрим на примере простейшей схемы двухфазного ШД (рис. 6.12, а).

При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
ШД имеет на статоре две пары явно выраженных полюсов, на которых находятся обмотки возбуждения (управления): обмотка 4 с выводами 1Н — 1К и обмотка 3 с выводами 2Н — 2К. Каждая из обмоток состоит из двух частей, находящихся на противоположных полюсах статора 2. Ротором в рассматриваемой схеме является двухполюсны постоянный магнит 5. Питание обмоток осуществляется импульсами напряжения, поступающими с устройства управления, которое преобразует одно из последовательных входных импульсов управления с частотой  в многоканальную по числу фаз ШД. Рассмотрим работу ШД, предположив, что в начальный момент времени напряжение подается на обмотку 4. Прохождение тока по этой обмотке вызывает появление магнитного поля статора 2 с вертикально расположенными полюсами N — S. В результате взаимодействия этого поля с постоянным магнитом (ротором) последний займет равновесное положение, в котором оси магнитных полей статора и ротора совпадают. Положение будет устойчивым, поскольку при отклонении от него на ротор будет действовать момент (синхронизирующий), стремящийся вернуть его в положение равновесия:
в многоканальную по числу фаз ШД. Рассмотрим работу ШД, предположив, что в начальный момент времени напряжение подается на обмотку 4. Прохождение тока по этой обмотке вызывает появление магнитного поля статора 2 с вертикально расположенными полюсами N — S. В результате взаимодействия этого поля с постоянным магнитом (ротором) последний займет равновесное положение, в котором оси магнитных полей статора и ротора совпадают. Положение будет устойчивым, поскольку при отклонении от него на ротор будет действовать момент (синхронизирующий), стремящийся вернуть его в положение равновесия:
М = Мmax sinα,
где α – угол между осями магнитных полей статора и ротора; Мmax — максимальный момент.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.


Допустим, что с помощью блока управления 1 напряжение снимается с обмотки 4 и подается на обмотку 3. В этом случае образуется магнитное поле статора с горизонтальными полюсами, т.е. магнитное поле дискретно совершило поворот на четверть окружности статора. При этом между осями статора и ротора появляется угол рассогласования α = 90˚ и на ротор будет действовать в соответствии с формулой вращающий момент М = Мmax, под действием которого он повернется на четверть окружности статора и займет новое устойчивое равновесное положение, показанное сплошной линией. Таким образом, вслед за шаговым перемещением поля статора совершит такое же шаговое перемещение и ротор двигателя.
Предположим, что отключилась обмотка 3 и питание вновь подается на обмотку 4, но с противоположной, а полярностью напряжения. Магнитное поле статора опять будет иметь вертикально расположенные полюсы, а полярностью. Это означает, что магнитное поле совершило еще один шаг на четверть окружности и снова на ротор будет действовать синхронизирующий момент, который повернет его в положение, показанное на рис. Следующий шаг в том же направлении ротор совершит, если отключить обмотку 4 и подключить об мотку 3 с обратной полярностью напряжения. И наконец, ротор завершит полный оборот при снятии напряжения с обмотки 3 и подаче напряжения на обмотку 4.
Кроме рассмотренного способа симметричной коммутации обмоток двигателя, обеспечивающего шаговое перемещение ротора на 90°, существует способ коммутации, позволяющий при той конструкции двигателя уменьшить шаг ротора вдвое.
Допустим, что исходное положение ШД соответствует схеме показанной на рис. Подключим обмотку 3 с полярностью соответствующей положению магнитного поля, не включая обмотку 4. При этом образуется вторая, горизонтальная система полюсов и действующее магнитное поле будет складывать из магнитных полей горизонтальных и вертикальных полюсов. О такого результирующего поля будет располагаться между полюсами с одинаковой полярностью, т.е. ось магнитного поля совершит поворот на 45°. Ротор при таком порядке возбуждения обмоток ШД повернется тоже на 45°, а не 90°, как было ранее.
Если теперь снять напряжение с обмотки 4, положение магнитного поля будет соответствовать. Следующее перемещение магнитного поля и ротора на 45° совершится при возбуждающей обмотки 4 без отключения обмотки 3 и т.д. Схема коммутации, при которой подключаются поочередно одна или две обмотки, называется несимметричной.
Угловое перемещение ШД в общем случае определяется выражением
α = 2π/(pn),
где р — число пар полюсов ротора; n — число переключений (тактов) в цикле, равное числу фаз ШД при симметричной коммутации удвоенному числу фаз при несимметричной.
Шаговое перемещение ротора соответствует последовательности управляющих импульсов, при этом каждому импульсу соответствует одно переключение обмотки ШД (один такт коммутации) и один шаг ротора. Суммарный угол поворота ШД пропорционален числу импульсов, а его скорость — частоте коммутации обмоток  :
:
ω = α.
для реверса ШД, например при симметричной схеме коммутации необходимо изменить полярность напряжения обмотки, которая была отключена на данном такте коммутации. Тогда ротор ШД совершит шаг в противоположном направлении.
Основным режимом работы шагового привода является динамический. В отличие от СД ШД рассчитаны на вхождение в синхронизм из состояния покоя и принудительное электрическое торможение. Благодаря этому в шаговом ЭП проще обеспечиваются:
пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую. Пуск ШД осуществляется скачкообразным или постепенным увеличением частоты входного сигнала от нуля до рабочей, торможение – снижением ее до нуля, а реверс — изменением последовательности коммутации обмоток ШД. Переходного процесса φ(t) в шаговом ЭП при отработке им трех импульсов управления, где φ — полный угол поворота вала ШД, а α — единичный (единичный шаг). Из рисунка видно, что переходный процесс отработки заданного перемещения имеет колебательный характер.
Обеспечение заданного характера переходных процессов в ЭП с ШД является основной и наиболее сложной задачей, так как вследствие электромагнитной инерции обмоток двигателя, механической инерции его ротора и наличия момента нагрузки на валу при резких изменениях частоты следования импульсов управления ротора может не успеть отработать полностью все импульсы. Максимальная частота управляющих импульсов, при которой возможен пуск ШД из неподвижного состояния без выпадания из синхронизма (пропуска шагов), называется частотой приемистости. Чем выше электромагнитная и механическая инерция ШД и больше момент его нагрузки, тем меньше частота приёмистости.
Современные ШД различны по конструктивному исполнению. В зависимости от числа фаз и устройства магнитной системы они бывают однофазными, двухфазными и многофазными с активным или пассивным ротором.
Активный ротор у ШД выполняется из постоянных магнитов или снабжается обмоткой возбуждения, как у обычных СД. Вследствие высокой экономичности и надежности в работе, технологичности изготовления, небольших габаритных размеров и массы широкое распространение получили ШД с ротором из постоянных магнитов, называемые магнитоэлектрическими. Обычно ШД с активным ротором из-за сложности его изготовления с малыми полюсными делениями имеют шаг от 15 до 90°. Для уменьшения шага в таких ШД увеличивают число фаз и тактов коммутации, а также используют двух статорную или двухроторную конструкцию.
Скорости ШД с активным ротором составляют от 208 до 314 рад/с, частота приемистости от 70 до 500 Гц, номинальные вращающие моменты от 10*10-6 до 10*10-3 Н*м.
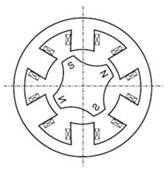
При необходимости получения небольших единичных перемещений используются двигатели с пассивным ротором, которые делятся на реактивные и индукторные. Работа таких ШД основана на взаимодействии магнитного поля и ферромагнитного тела. Статор и ротор реактивного ШД имеют явно выраженные полюсы, называемые обычно зубцами. На зубцах статора размещаются обмотки возбуждения, питаемые от электронного коммутатора. Ротор выполняется из ферромагнитного материала и не имеет обмотки возбуждения, вследствие чего и называется пассивным.
Отличительная особенность реактивного ШД заключается в неравенстве числа зубцов статора  и ротора
и ротора  причем >. В следствие такой конструкции при каждом переключении обмоток ротор совершает поворот (шаг), равный разности полюсных делений статора и ротора:
причем >. В следствие такой конструкции при каждом переключении обмоток ротор совершает поворот (шаг), равный разности полюсных делений статора и ротора:
α = 
Уменьшая разность числа зубцов и можно снизить шаг ротора. На практике эту разность выбирают чётной, что улучшает использование ШД. Для уменьшения шага полюсы статора выполняют с несколькими зубцами.
Реактивные ШД при своей простоте и технологичности имеют существенный недостаток — незначительные мощность и синхронизирующий момент, что ограничивает их применение. Этот недостаток отсутствует в индукторных ШД в которых для увеличения синхронизирующего момента ротор подмагничивается со сторон статора, с помощью постоянных магнитов или дополнительной о мотки возбуждения.
Выпускается несколько серий ШД с пассивным ротором (Ш, ШДР, ШД, РШД), имеющих шаг от 1,5 до 9°, вращающие моменты от 2,5*10-5 до 10*10-3 Н*м и частоту приемистости от 250 до 1200 Гц.
Развитие дискретного электропривода привело к созданию специальных видов ШД — линейных, волновых, с малоинерционными катящимся роторами.
На базе цилиндрических линейных ШД созданы двухкоординатные линейно - поворотные ШД, суммирующие на своем валу два независимых движения — вращательное и поступательное.
Важным достижением в области дискретного электропривода, является создание так называемых многокоординатных ШД, осуществляющих перемещение исполнительных органов по трем координатам в пространстве. Двигатели такого рода, отличаясь высокими точностью позиционирования и скоростью, используются в приводах манипуляторов, роботов и автоматических линий станков.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 1028; Нарушение авторских прав?; Мы поможем в написании вашей работы!