КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Задачи управления движением рабочего органа исполнительного механизма
|
|
|
|
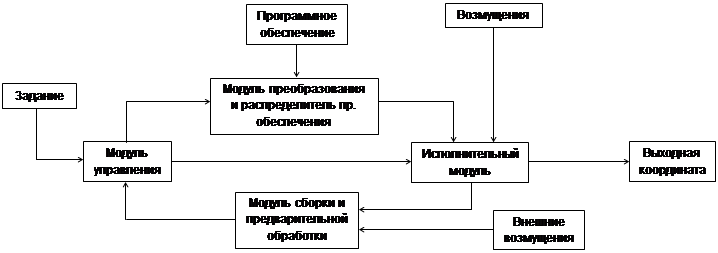
Функциональные схемы МТС и ЭМС
Функциональная схема показывает функции отдельных элементов системы или их совокупность.
ОУ (объект управления), ИМ (исполнительный механизм), П (преобразователь), У (усилитель), СУ (система управления).
Классификация САУ
По принципу управления
Разомкнутые
- по задающему воздействию
- компенсация возмущения
Замкнутые
- компенсация отклонения
Комбинированные
- компенсация отклонения и возмущения
По величине установившейся ошибки
- статические
- астатические
По цели регулирования
- системы стабилизации
- системы программного регулирования
- следящие системы
По количеству управляемых величин
- одномерные
- многомерные
- несвязное управление
- связное управление
По способу математического описания
- линейные
- обыкновенные
- с переменными параметрами
- с распределёнными параметрами
- нелинейные
По характеру сигналов
- Непрерывные
- Дискретные
- Релейные
- Импульсные
- Цифровые
По способу настройки
- Обыкновенные
- Адаптивные
- Самонастройка программы
- Самонастройка параметров
- Самонастройка структуры
Виды обратных связей:
- Положительная / Отрицательная
- Гибкая / Жёсткая
- Местная / Полная
- Единичная / Неединичная
МТС – преобразование электрической энергии в механическую энергию.
Наиболее типичный представитель МТС – ПР (промышленный робот) – универсальное средство для комплектации автоматизированных производственных процессов (РТК и ГА).
ГОСТ25686-85 – ПР – автоматическая машина, стационарная или передвижная, состоит из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности и перепрограммируемого устройства программного управления, для выполнения в производственном (технологическом) процессе двигательных и управляющих функций.
Классификация
По информационным возможностям
- 1-го поколения – с обучением – широко используются в промышленности.
Программируются и выполняют различные операции
- 2-го поколения – адаптивные
Воспринимают информацию о внешней среде с помощью сенсорных и тактильных датчиков.
Организующая система управления, обучения и адаптации с использованием ЭВМ.
Перемещение с учётом информации, поступающей с датчиков.
- 3-го поколения – интеллектуальные – наделены искусственным интеллектом и способностью к самообучению.
Распознавание предметов и образов, составление планов решения поставленных задач и контроль выполнения.
По степени универсальности
- Универсальные – максимальное число степеней подвижности, выполняют основные и вспомогательные операции, с автоматической сменой захватного устройства.
- Специализированные – ограниченное число степеней подвижности, для технологических операций определённого типа, например, обслуживание оборудования (механосборка).
- Специальные – одна-три степени подвижности, для определённых технологических операций по фиксированной программе.
Области применения ПР (в машиностроении):
- Единичное обслуживание оборудования (снятие-установка деталей)
- Групповое обслуживание оборудования (перемещение деталей с операции на операцию; линейное, параллельное, круговое расположение)
- Единичное выполнение основных операций
Если машинный технологический процесс характеризуется периодичностью, т.е. реализация его (движение заготовок, деталей, ПР, энергетических и информационных потоков) сопровождается повторяемостью во времени – цикл.
Рабочий (технологический) цикл – в соответствии с технологией.
Кинематический цикл – определяется кинематикой ПР
Все рабочие органы имеют определённые законы движения, последовательности их включения должны быть синхронизированы (согласованы) между собой, с технологическим циклом и в пространстве.
Кроме этого движения в любом цикле должно быть оптимизировано с позиции привода, т.е. по быстродействию, точности, затрате энергии.
Ориентация ПР – по степеням подвижности – определяется кинематической схемой.
Модули компоновочных схем (на их базе строятся ПР)
- Вращающиеся шарнирные звенья с движителями
- Вращающиеся шарнирные звенья пассивные
- Звенья возвратно-поступательные с движителями
- Пассивные звенья возвратно-поступательного движения (ползуны, телескопы)
Тенденция (современное состояние) – ПР с кинематическими схемами в которых наиболее нагруженные звенья не дают статических (а тем более шарнирных) моментов на привод плеча.
РМ нагружаются:
- грузом
- массами звеньев
- сухим трением в сочленениях
- вязким трением в звеньях
Повысить соотношение можно:
- Уравновешиванием с регулируемой жесткостью
- Увеличением жесткости самой конструкции и снижением веса
ПР должен перемещаться (его схват) по 6 координатам (3 – линейные, 3 – угловые)
Задачи:
- гибкость
- точность
- производительность
- минимальная затрата энергии
Мехатроника – изучает новый методологический подход к созданию модулей и машин с качественно новыми характеристиками.
Роботы – современный класс машин с компьютерным управлением движением.
Одно из направлений автоматизации – роботизация – разработка и внедрение МТС (роботы как представители)
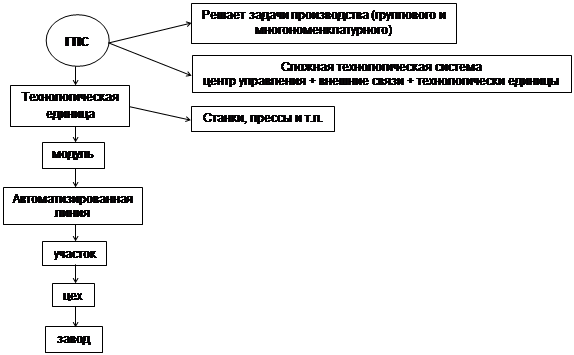
Большая номенклатура
Частая смена предметов производства
Много различных технологических операций
 |
|
Робот – неотъемлемая часть такого производства
Состоит из трёх частей:
1. Механической
2. Приводной (исполнительной)
3. Управляющей (датчики, искусственный интеллект, устройства связи)
Управляющая часть определяется характером окружающей среды, с которой взаимодействует ПР.
Окружающая среда – объекты роботизации, которые могут быть:
- в неупорядоченном состоянии
- в упорядоченном состоянии
- в частично упорядоченном состоянии
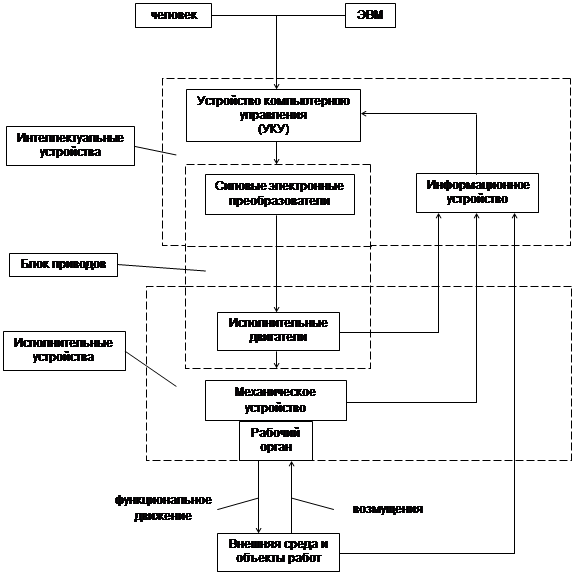
Мехатроника à ПР à Модульный принцип при проектировании, позволяющий из минимального числа универсальных, конструктивно законченных узлов-модулей создать машину-автомат, как составляющую сложной механической системы.
Согласование движений исполнительных механизмов объекта управления – переносить в систему управления.
Мехатронный модуль – это функционально и конструктивно самостоятельное изделие для реализации движений с взаимопроникновением и синергетической аппаратно-программной интеграцией составляющих его устройств, имеющих различную физическую природу.
Имеет одну, реже две степени подвижности.
По составу их разделяют на три группы:
- Модули движения (МД)
- Мехатронные модули движения (ММД)
- Интеллектуальные мехатронные модули движения (ИММД)
Каждая группа может отличаться по виду двигателя, датчиками и другими устройствами.
Мехатронная машина – интеллектуальная многомерная система, построенная на мехатронных принципах и технологиях, которая способна эффективно выполнить программы функциональных движений в изменяющихся условиях внешней среды.
 |
Внешняя среда – технологическое окружение, основное и дополнительное.
| |||
 | |||
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 510; Нарушение авторских прав?; Мы поможем в написании вашей работы!