КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Замкнутые системы автоматического управления ЭП
|
|
|
|
С изменением тока двигателя изменяется напряжение преобразователя (ЭДС), поэтому в схеме с обратной связью по напряжению необходимо учитывать токовую составляющую, которая показана в виде положительной обратной связи по току.
Система с обратной связью по напряжению.
П – преобразователь
М – двигатель ПТ.
ОУ1…ОУ3 – обмотки управления и обратных связей.
 – напряжение задания (изменяется сигналом)
– напряжение задания (изменяется сигналом)
 и
и  – напряжения обратных связей по напряжению и току.
– напряжения обратных связей по напряжению и току.
ДН и ДТ – датчики напряжения и тока.
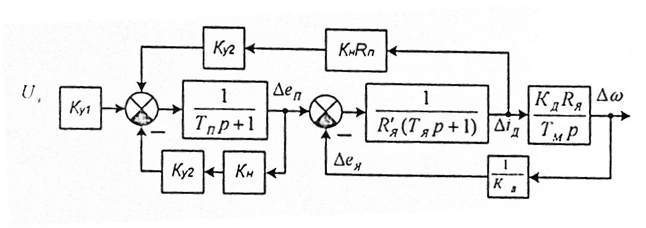
Структурная схема:
 – коэффициенты усиления ОУ1
– коэффициенты усиления ОУ1
 – коэффициенты усиления ОУ2
– коэффициенты усиления ОУ2
 – коэффициент обратной связи по напряжению
– коэффициент обратной связи по напряжению
Передаточная функция по задающему воздействию.

Кривые реакции на скачок задания
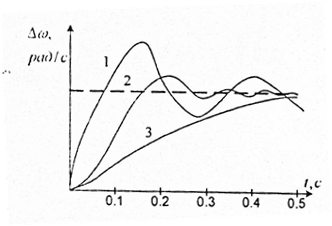
1 – кривая по передаточной функции 
2 – кривая без учёта токовой составляющей
3 – кривая разомкнутой системы
 – эквивалентная постоянная времени преобразователя
– эквивалентная постоянная времени преобразователя
 – эквивалентный коэффициент усиления ОУ1
– эквивалентный коэффициент усиления ОУ1
 – эквивалентный коэффициент усиления ОУ2
– эквивалентный коэффициент усиления ОУ2
Выводы:
- Введение обратной связи по напряжению ускоряет переходный процесс на начальной стадии, но удлиняет на конечной (колебания).
- Обратная связь по напряжению снижает коэффициент усиления и постоянную преобразователя.
- Наличие в обратной связи по напряжению токовой составляющей ухудшает демпфирование системы – уменьшается коэффициент при первой производной

- Характер переходного процесса определяется в большей степени параметрами двигателя.
Обратная связь по скорости оказывает аналогичное действие.
Назначение:
- управлять электроприводом по заданному закону;
- компенсировать влияние возмущений.
Система автоматического управления (САУ) вырабатывает сигнал управления в зависимости от сигналов датчиков и напряжения двигателя.
Требования к САУ:
- Система должна быть устойчивой в установленном режиме, т.е. после изменения управляющего воздействия или исчезновения возмущения должны установиться заданные значения параметров.
- Погрешность (ошибка регулирования) в установленном режиме не должна превышать заданной величины.
- Система должна обеспечивать необходимое качество производственного процесса.
- В электроприводе используются три основных принципа построения САУ
- попеременный;
- параллельный;
- последовательный.
Повышение качества работы САУ достигается введением корректирующих звеньев и связей, а также схемой построения регуляторов.
Параллельная коррекция:
+
- высокое быстродействие;
- простая реализация.
–
- сложность расчёта;
- трудоёмкость постройки;
- необходимость перерасчёта при изменении одного параметра.
Последовательная коррекция:
+
- удобное ограничение координат
- унифицированные узлы и блоки
- простая наладка
–
- сложность организация САУ;
- энергоёмкость (источник питания);
- низкая помехозащищённость.
Попеременный принцип – наиболее простой, но не дающий высокого качества регулирования.
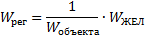
Сущность подчиненного регулирования – безынерционная система, отрабатывающая напряжение управления без перерегулирования. Для этого последовательно с объектом необходимо поставить регулятор с W(p) обратной W(p) объекта.
Это невозможно сделать по ряду причин:
- Объект содержит несколько Т, перед некоторыми принципиально невозможно поставить регулятор.
- Скорость нарастания тока якоря
 в этом случае должна быть недопустимо большой, что ограничивается коммутационной способностью коллектора двигателя и вызывает недопустимые ударные нагрузки на механизм.
в этом случае должна быть недопустимо большой, что ограничивается коммутационной способностью коллектора двигателя и вызывает недопустимые ударные нагрузки на механизм.
Для отечественных машин допустимо  .
.
- Такая система чувствительна к различным помехам, что может привести к ложному открытию теристоров.
Ищется компромиссное решение – максимальное быстродействие при допустимой помехозащищённости.
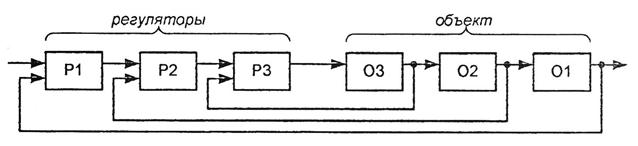
Строится САУ, состоящая из ряда контуров, число которых равно числу регулируемых координат.
Постоянные времени объекта разбиваются на:
большие – которые должны быть скомпенсированы;
малые – сумма которых не компенсируется.

|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 746; Нарушение авторских прав?; Мы поможем в написании вашей работы!