КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Промышленные роботы
|
|
|
|
Современная научно-техническая революция воплотила в жизнь многие мечты человечества. В настоящее время становится реальностью и мечта о роботе — помощнике человека, способном выполнять разнообразные ручные вспомогательные операции. Созданы научно-технические предпосылки для появления и широкого внедрения роботов, управляемых вычислительными машинами. Нужда в таких роботах весьма велика, поскольку возникла острая необходимость автоматизации многочисленных ручных и вспомогательных работ в различных производствах, в том числе и на предприятиях почтовой связи, особенно на погрузочно-разгрузочных операциях. В связи с освоением атомной энергии, океана и космоса роботы должны также заменить человека при работе в неблагоприятных и опасных условиях.
Роботы относятся к особому классу автоматических систем. Своеобразие их конструкций состоит в наличии у них механических «рук» — манипуляторов, а иногда и органов перемещения. Движение в каждой из степеней подвижности «рук» и «ног» обеспечивается автоматизированными приводами — электрическими, гидравлическими или пневматическими.
Для управления роботам может попользоваться как обычная автоматика, так и вычислительная машина, представляющая как бы его «мозг». Для получения информации об окружающей среде (например, о размерах и положении перегружаемых или лицуемых посылок) и о состоянии исполнительных органов (например, о положении их в пространстве относительно заданных осей ориентации) роботам придаются различного рода устройства сбора информации: датчики соприкосновения, положения и усилия, а в ряде случаев — еще и аналоги зрительного анализатора, предназначенные для восприятия визуальной информации.
|
|
|
В промышленности роботы позволяют более полно использовать возможности технологических и транспортных машин, повысить производительность труда, высвободить большое число людей, занятых на тяжелых, однообразных и утомительных работах.
В настоящее время в Советском Союзе и за рубежом создано много разновидностей роботов, накоплен значительный опыт разработки такого рода устройств, сложилось научное направление, связанное с их анализом и синтезом.
Роботы могут иметь или полностью автоматический программный режим работы, или работать при участии человека-оператора.
По своему назначению роботы подразделяются на универсальные и специальные. Специальные роботы по своей конструкции проще, так как они предназначены для выполнения вполне определенных операций в соответствующих производствах при обслуживании конкретного оборудования.
По техническим возможностям роботы подразделяются на три поколения: 1 —роботы, работающие по жесткой программе и требующие относительно точного позиционирования изделий, с которыми они манипулируют; 2 — роботы с очувствлением, способные приспосабливаться к окружающей среде и не требующие точного позиционирования изделий — адаптированные роботы; 3 — роботы с искусственным интеллектом, способные воспринимать окружающую обстановку и в зависимости от нее самостоятельно выбирать направления движения для достижения конечной цели — «разумные» роботы. Для автоматизации производственных процессов обычно используются промышленные роботы (ПР). Их применяют главным образом на погрузочно-разгрузочных операциях, на складах тарно-штучных грузов, в межоперационных передачах различных технологических процессов, при автоматической смене инструмента на машинах с программным управлением, в сборочных и упаковочных автоматах. Роботы могут быть также применены для лицовки посылок, формирования из посылок партий для автоматической загрузки контейнеров и других операций на предприятиях почтовой связи.
|
|
|
В настоящее время считается экономически и технически целесообразным использовать роботы в единой системе группового программного управления оборудованием, в которой управление всей группой машин осуществляется общей вычислительной системой. При таком подходе к делу робот становится органическим элементом АСУТП.
Промышленные роботы являются автоматами, имитирующими в какой-то мере пространственные движения человеческой руки. Универсальность подобных автоматов заключается в том, что они могут работать в различных технологических процессах с различными обрабатываемыми изделиями. Перестройка их для другого технологического процесса осуществляется сменой программы и рабочего инструмента или захвата, причем последние в некоторых конструкциях сменяются автоматически. На рис. 10.11 показан ряд кинематических схем ПР. В принятых обозначениях на схемах 1, 2, 3 — соответственно аналоги плечевого, локтевого суставов человека и кисти руки; 4 — захватное устройство; 5 — основание.
Кинематические схемы характеризуются следующей свободой движения «руки» ПР.
1. Выполняются только поступательные движения в объемно-прямоугольной зоне рис. 10.11 а. Подобная кинематическая структура ПР может быть использована при выполнении таких погрузочно-разгрузочных работ, как снятие груза с конвейера, пакетирование и штабелирование груза и т.п.
2. Выполняются только вращательные движения — грузы перемещаются по внешнему контуру сферической зоны обслуживания. Поворотное движение верхнего звена около одной оси плеча показано на рис. 10.11 б. Эта кинематическая схема мало пригодна для выполнения перегрузочных и складских операций.
3. Выполняются одно вращательное движение относительно вертикальной оси и два поступательных по двум другим координатам. При этом обеспечивается перемещение перегружаемых изделий в объемно-цилиндрической зоне с вертикальной неподвижной или подвижной осью (рис. 10.11 в).
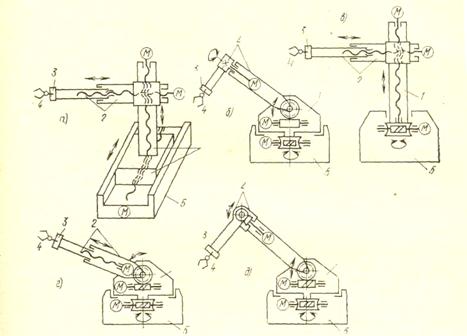
Рис. 10.11
В последнем случае основание ПР устанавливается на тележку, которая движется по рельсам вдоль фронта перегрузочных работ.
|
|
|
4. Выполняются одно поступательное и два вращательных движения. При этом «рука» имеет возможность перемещать груз в объемно-сферической зоне с неподвижной осью сферы (рис. 10.1 г, д) или подвижной при установке ПР на тележке. Последние три схемы имеют наибольшую универсальность и могут быть рекомендованы при конструировании ПР для перегрузочных, упаковочных и складских операций.
Если грузы заранее не ориентированы относительно их конечной позиции, то приводятся во вращение «кисти руки» ПР. Кинематика «кисти» позволяет изменять ориентацию груза без изменения положения «руки». На рис. 10,12 а показана кинематическая схема «кисти» с двумя степенями свободы — одно вращательное движение и одно поступательное. Поступательное движение предназначено для зажима и разжима клещевого захвата. Такая схема пригодна для перегрузки грузов, ориентированных в одной из плоскостей — вертикальной или горизонтальной. Для полностью неориентированных грузов надо использовать кисть с двумя вращательными и одним поступательным движениями (рис. 10.12 б).
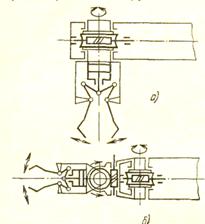
Рис. 10.12
Кинематическая структура ПР выражается следующей формулой: Р=Р0+Рр+Рк, где Р — общее число степеней свободы (количество различных движений); Ро, Рр и Рк — степени свободы основания, «руки» и «кисти». Достаточно универсальными являются ПР, если Р=5 7, при этом Р=(01)о+Зр+(2З)к.
7, при этом Р=(01)о+Зр+(2З)к.
Захваты делаются в виде клещей, цанг (при зажиме за отверстие в изделии), электромагнитов или пневматических присосков. Приводы основания, «руки» и «кисти» ПР могут быть электрическими, гидравлическими и пневматическими.
Промышленные роботы могут выполнять различные операции: захватывать изделия, менять их положения в пространстве, перемещать и помещать их в определенное место, закреплять и т.п. Благодаря своей широкой универсальности, сравнительно легкой переналаживаемости, высокой надежности и открывающимся при их использовании новым возможностям автоматизации производственных процессов промышленные роботы начинают все шире применяться в различных отраслях промышленности как в Советском Союзе, так и за рубежом. За рубежом наибольшее применение промышленные роботы нашли в таких странах, как США, Англия и Япония.
|
|
|
Одним из роботов 2-го поколения можно назвать адаптивный робот фирмы «Hitachi» (Япония)1,
 1 Белянин П. Н. Промышленные роботы. М.: Машиностроение, 1975
1 Белянин П. Н. Промышленные роботы. М.: Машиностроение, 1975
который имитирует чувство осязания и определяет величину развиваемого усилия, необходимого для выполнения конкретной работы. Этот робот используется для упорядоченной укладки в тару различных изделий. Он надежно зажимает изделия, при необходимости меняет их пространственное положение, помещает предметы последовательно рядами и плотно прижимает их к стенкам тары или к соседнему, ранее уложенному изделию.
На предприятиях почтовой связи промышленные роботы могут быть использованы на целом ряде операций, таких, как, например, формирование из посылок пакетов, загрузка посылками контейнеров, лицовка посылок и др. Однако, учитывая высокую стоимость
и сложность роботов, применению их в каждом конкретном случае должен предшествовать тщательный технико-экономический расчет эффективности.
Глава 11
КОМПЛЕКСНАЯ МЕХАНИЗАЦИЯ И АВТОМАТИЗАЦИЯ
ПРЕДПРИЯТИЙ ПОЧТОВОЙ СВЯЗИ
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 323; Нарушение авторских прав?; Мы поможем в написании вашей работы!