КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Electrodynamic braking mode
|
|
|
|
Counter switching braking mode
Counter switching braking mode is the main braking mode of DC motor with series excitation. It id widely used in load – lifting mechanisms (with active static moment) and in travel and slewing mechanism (with reactive static moment).
At operation in counter switching braking mode additional resistance is connecting into the armature circuit of the motor for resistance increasing with the aim to limit armature current. Such braking mode will be possible, if motive moment of load will be more than short-circuited moment Ms. c. of the motor. Motor load at counter switching should to be limited by admissible value of armature circuit current.
Counter switching brake of DC motor with series excitation is realizing at the same conditions, as for DC motor with independent excitation. So, we also have two cases.
The 1st case. Motor armature at influence of external moment or inertia forces rotates in one direction, and motor windings are powered to rotate in inverse direction (in other words, motor windings are powered to rotate in one rotation direction, and the motor due to external moment rotates in opposite direction). I. e. braking realizes at active static moment (braking condition ).
).
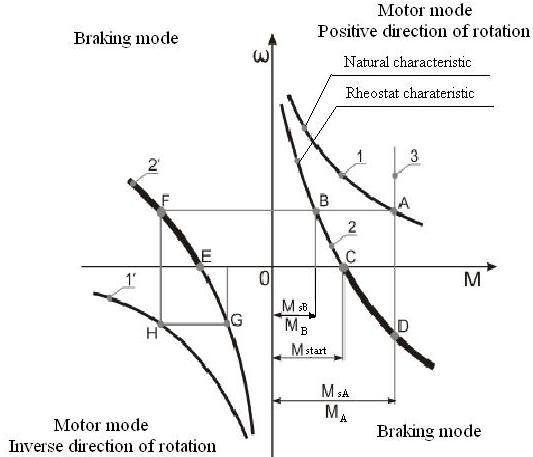
Mechanical characteristic in this case is a continuity of rheostat characteristic of motor mode into the fourth quadrant – in the limit of negative speeds. The process occurs by the next way. The motor of load-lifting mechanism with constant speed lifts the load (point A); here is steady-state mode: resistive moment MsA (by characteristic 3) is equal to the motive moment of the motor MA (by characteristic 1). The resistor is connected into the armature circuit, and DC motor with series excitation passes into rheostat characteristic 2 (point B); here is imbalance – resistive moment of the load is still constant MsA, but motive moment MB will decrease. Due to excess of static moment of the load the speed of load lifting will start to decrease by characteristic 2 in the direction from B to C. In the point C the speed will be equal to zero  and at further influence of the excess of the load moment (static) the motor with start to rotate into the opposite direction, and the load will start to low; at the point D motive moment of the motor MA (by characteristic 2) will be equal to the resistive moment of the load MCA (by characteristic 3), i. e. braking load lowering will be steady-state. Changing of rotation direction of the motor causes the sign changing of emf Ea, and obtains the direction in accordance with the direction of supply voltage (generator is in series with the main) – the main condition of counter switching is existing.
and at further influence of the excess of the load moment (static) the motor with start to rotate into the opposite direction, and the load will start to low; at the point D motive moment of the motor MA (by characteristic 2) will be equal to the resistive moment of the load MCA (by characteristic 3), i. e. braking load lowering will be steady-state. Changing of rotation direction of the motor causes the sign changing of emf Ea, and obtains the direction in accordance with the direction of supply voltage (generator is in series with the main) – the main condition of counter switching is existing.
The 2nd case. Braking due to accumulated by mechanism kinetic energy (with reactive static moment) by changing of polarity of motor armature circuit when it rotates in correspondence with the scheme, using at motor reverse (see the scheme of motor reverse). Physical braking processes are the same for such case for DC motor with independent excitation, i. e. emf is directed accordingly with supply voltage (generator is in series with the main), and motor moment is directed opposite to rotation direction of the motor.
Let before changing of polarity motor operated on natural characteristic in the point A and overcame the resistive moment of the load MsA (see characteristics on the previous page).
To do the braking it is should to connect additional resistance in armature circuit for limiting of current value at counter switching – the motor will pass to operate into rheostat characteristic 2 in the point B, staying in the motor mode. Also it is should to realize counter switching, so armature current and motor moment will change its sign instantly, and moving par of the motor due to inertia action still preserves its angular speed (value and direction), i. e. motor operation will pass into the point F in the second quadrant (direction of current and moment is changed). Due to influence of braking moment of the motor kinetic energy will be compensated. It is accumulated in rotating parts of drive and the speed will be increased by static characteristic 2′ from the point F to the point E, in which accumulated energy will be completely damped and the motor will stop (the speed will be equal to zero).
Braking process is finished, but motor moment is continue to act on the armature, and avoiding rotation of the motor in opposite direction under influence of this moment it is should to deenergize the motor from the main in the point E.
If the motor isn`t deenergized from the main in the point E then it will start to rotate in opposite direction in motor mode of inverse rotation by rheostat characteristic (from E to G and further).
Such peculiarities of motor braking with reactive static moment (of all motor types) have two consequences:
- if the aim would be to brake the motor to full stop and automation failed to operate, then the drive motion in opposite direction can cause to emergency and accidents (for example, the drive of crane jib turning displays the load and after load there is a rigger);
- usual reverse of any motor on the run by electric methods is automatically accompanied by braking moment with reactive static moment for the speed of initial direction of rotation.
Electrodynamic braking mode of DC motor with series excitation can be realized by two methods:
- braking at self-excitation of DC machine;
- braking at independent excitation of DC machine.
The 1st case. Self-excitation braking is more widely used, and during this brake excitation winding and armature are deenergized from the main and are closed on braking resistor Ra.b. in correspondence with the next scheme.
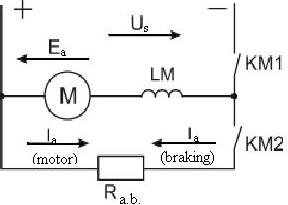
KM1 – is closed, KM2 – is opened – there is the motor mode;
KM1 – is opened, KM2 – is closed – there is the braking mode;
For such braking mode there is no need in power supply for its realization and such condition furnished its widely application, especially in cases of emergency braking, where independence from power supply is required condition of brake realization.
After deenergizing of the motor from the main its armature is continue to rotate due to accumulated kinetic or potential energy. At such rotation due to residual magnetization emf will be induced in armature. At realization off all conditions of self-excitation the process of self-excitation will be started (induced emf will increase the current, which in turn will amplify the magnetic flux and it in turn will increase emf).
From mentioned above it can be concluded, that for arising and developing of self-excitation it is required, that current direction in excitation winding will be coinciding with the current direction in this winding in motor operation mode, which preceded to braking, if at this direction of motor rotation wasn`t changed.
For example, if motor mode preceded to dynamic braking mode with self-excitation, then for formulated condition it is need to change the polarity of excitation winding (or armature), because in motor mode current direction coincides with direction of supply voltage, when in braking mode current direction must coincide with emf direction (Ea) of the armature (see the figure on the previous page). Here the motor mode (KM1is closed, KM2 is opened) preceded to braking one (KM1 is opened, KM2 is closed).
Mechanical characteristic of dynamic braking at self-excitation are placed in the second quadrant and have more stiffness at less resistance values (as for DC motor with independent excitation).
The braking process at load lowering is realized by the next way. At lowering in the first moment of time the motor speed and it braking moment are low. The load lowers free at influence of gravity force, the speed increase quickly, avalanche increasing of self-excitation and abrupt increasing of braking moment occur. Abrupt braking results to significant dynamic loads and mechanical shocks. Such shocks are disadvantage of such a method. Such braking efficiency also stipulated wide application of this method as emergent braking.
The 2nd case. Dynamic braking by the scheme of independent excitation is applied in usual installations. For realizing of such braking it is required to deenergize from the main by contactor KM1 an armature circuit and to close both as contactor KM2 as KM3. The result will be closing of armature circuit on braking resistor Ra.b. (contactor KM2), and powering of excitation winding of DC motor with series excitation on voltage supply (by contactor KM3), not directly, but through additional resistor Rexc.
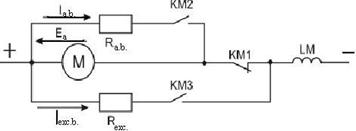
For obtaining of sufficient braking moment the motor must have magnetic flux approximately equal to rated, i. e. through excitation winding must flow rated current. It is should chose such value of additional resistance, that the current in excitation circuit will be equal to rated current of the motor Iexc.b. = Ia rat (that resistance Rexc will be approximately equal to external armature resistance).
At braking of DC motor with series excitation by the scheme of independent excitation the processes will be the same, as in DC motor with independent excitation, but the power almost equal to rated will be consumed from the main, i. e. braking will occur at worse energy datum, than in DC motor with independent excitation.
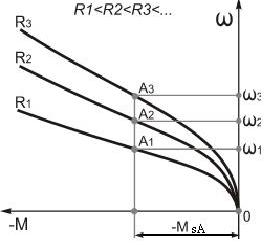
Characteristics of dynamic braking of DC motor with series excitation by the scheme of independent excitation are identical to such DC motor with independent excitation.
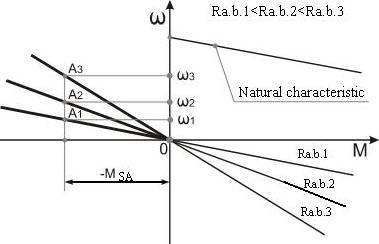
So, these characteristic are rectilinear, all they are intersected in one point (in the origin). Supply voltage is equal to zero, as it is not applied to the armature. Characteristics pass from the second quadrant into the fourth one. The second quadrant is for specified direction of rotation, forth is for opposite one. Characteristic stiffness (slope) depends, as previously, from resistance value in armature circuit Ra.b., on which armature circuit at braking is closed. If Ra.b.1 is equal to zero, then the characteristic is parallel to natural characteristic of the motor.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 674; Нарушение авторских прав?; Мы поможем в написании вашей работы!