КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Dynamic braking. This braking is realized (in correspondence with the scheme) also by two methods:
|
|
|
|
This braking is realized (in correspondence with the scheme) also by two methods:
- at connected SE winding;
- at disconnected SE winding.
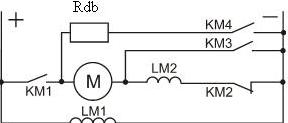
Motor mode: at closed contactor KM2 and opened contactors KM3 and KM4 linear contactor KM1 is closed.
The 1st case of dynamic brake at connected SE winding (LM2): linear contactor KM1 is opened, contactor KM3 is also opened and contactors KM4 and KM2 are closed. With this SE winding will demagnetize the machine and decrease braking moment, if at this armature current or current of SE winding is not reversed. If to realize such condition, then magnetic flux of SE winding will be, inversely, magnetizing one (relatively to the flux of IE winding), and braking moment will increase. But it is not applied in practice, because reverse of armature current or SE winding (in addition to the scheme of dynamic brake itself) generally complicates the braking scheme.
Thereby, the 2nd case of dynamic braking at disconnected SE winding (see the previous scheme) is applied.
Here with opened linear contactor KM1 and opened contactor KM3 contactors KM3 and KM4 are connected. I. e. DCM ME operates as ordinary DCM IE. Those fact, that braking is realized at incomplete magnetic flux doesn`t have essential meaning, because braking efficiency can be increased due to current rising by decreasing of additional resistive value of armature circuit.
Characteristics 1 and 2 correspond to dynamic braking at the presence of the current in SE winding, and that is why they are nonlinear. Characteristics 1′ and 2′ correspond to dynamic braking without SE winding, i. e. only at the presence of IE winding, so they are linear.
Thereby, DCM ME in braking modes operates less effective due to demagnetization action of SE winding relatively to magnetic flux of IE winding. Elimination of this disadvantage by changing of polarity of armature current or SE winding during passing into generating mode is unreasonable because of complication of electric braking scheme.
In real conditions such problem is solved simply: in most braking cases SE winding is disconnected from the braking process either shunting, or simply disconnecting it. Then only IE winding remains and DCM ME characteristics become analogical to DCM IE characteristics.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 397; Нарушение авторских прав?; Мы поможем в написании вашей работы!