КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные понятия и определения. 1.1.Задача управления. Рассмотрим объект управления – это механизм, устройство, технологический или иной процесс
|
|
|
|
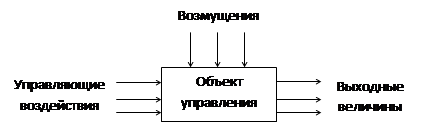
1.1. Задача управления. Рассмотрим объект управления – это механизм, устройство, технологический или иной процесс, желаемое поведение которого необходимо обеспечить.
В реальных условиях на объект управления оказывает влияние внешняя среда. Его поведение характеризуют изменения во времени входных воздействий и выходных величин.
Входные воздействия разделяют на две группы:
· Управляющие воздействия, которые обеспечивают желаемое изменение поведения объекта.
· Возмущающие воздействия (помехи), которые мешают достижению цели управления. Их изменить, как правило, невозможно.
 |
Задача управления заключается в формировании такого закона изменения управления воздействий, при котором достигается желаемое поведение объекта независимо от наличия возмущений.
Будем рассматривать более узкую задачу автоматического регулирования, т.к. регулирование без участия человека имеет большее практическое значение.
Задача регулирования заключается в поддержании выходных величин равными (пропорциональными) некоторым эталонным функциям времени – задающим воздействиям, которые могут быть постоянными или изменяющимся как по заданному, так и по неизвестному закону.
1.2. Разомкнутые и замкнутые системы регулирования.
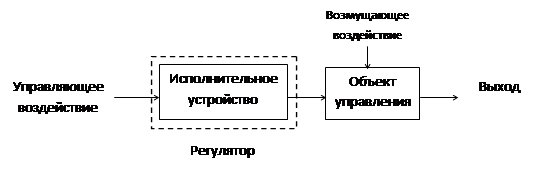 Разомкнутая система регулирования
Разомкнутая система регулирования
Область применения ограничена тем, что нельзя пренебречь влиянием возмущений.
Замкнутая система управления (более сложная и более совершенная, используя принцип обратной связи)

Результат измерения выходной величины в виде сигнала обратной связи сравнивается с управляющим воздействием, которое несет информацию о заданном значении выходной величины. Получается сигнал ошибки, который поступает в регулятор. Регулятор воздействует на объект управления с целью уменьшения сигнала ошибки.
1.3. Функциональные схемы автоматического управления
Показывают из каких элементов состоит система и как элементы соединены между собой. Под элементом понимается конструктивно обособленная часть системы, выполняющая определенные самостоятельные функции.
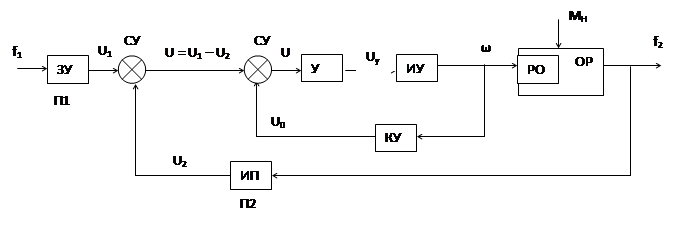
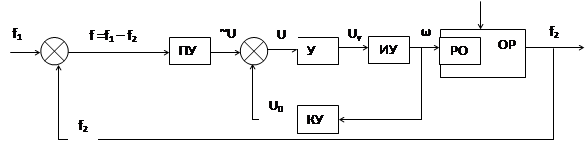
Рассмотрим типовую функциональную схему замкнутой САР, состоящей из объекта регулирования (ОР) и автоматического регулятора.
g – управляющее воздействие
ε – сигнал ошибки, равный разности между сигналом с ЗУ и сигналом обратной связи
r – регулирующее воздействие
f – возмущающее воздействие

Устройства и элементы, входящие в регулятор, по функциональному назначению классифицируются следующим образом:
Задающее устройство (ЗУ) предназначено для выработки сигнала, пропорционального заданному значению регулируемой величины и удобного для сравнения с регулируемой величиной. ЗУ могут быть пружины, калиброванные сопротивления и т.п.
Измерительные преобразователи (элементы) (ИП) предназначены для измерения регулируемых величин или возмущающих воздействий и преобразования их в сигналы, удобные для дальнейшего использования в процессе регулирования. Вид измерительного элемента чаще всего определяется физической природой регулируемой величины и желательным видом преобразования входной и выходной величин.
Сравнивающее устройство (СУ) вырабатывает сигнал ошибки на основании сравнения сигналов управления и главной обратной связи.
Преобразующие устройства (ПУ) преобразуют одну физическую величину в другую, более удобную для использования в процессе регулирования.
Усилительное устройство (УУ) предназначено для усиления мощности сигналов в регуляторах. Оно управляет энергией, которая поступает от постороннего источника энергии.
Исполнительное устройство (ИУ) вырабатывает регулирующие воздействие r(t), непосредственно прикладываемое к объекту управления и оказывающее воздействие на регулирующий орган.
Корректирующие устройства (КУ) повышают устойчивость и улучшают динамические свойства системы регулирования. По способу включения корректирующие устройства разделяются на последовательные и параллельные (местные обратные связи).
Вспомогательное сравнивающее устройство сопоставляет сигнал в промежуточной точке прямой цепи с сигналом местной обратной связи.
Пример. Составить функциональную схему дистанционной следящей (все или несколько задающих воздействий) системы передачи угла поворота.
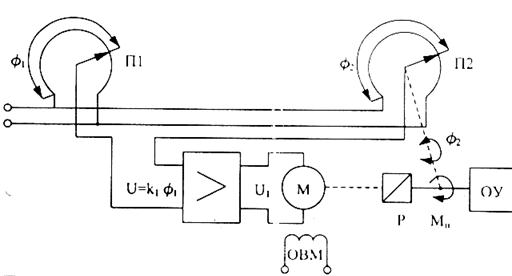
Принципиальная схема
Назначение подобной системы – «следить», чтобы выходной вал, связанный с объектом управления ОУ, точно следовал за положением задающего входного вала. Входная и выходная оси следящей системы связаны соответственно с движками задающего П1 и отрабатывающего П2 потенциометров.
Разность снимаемых с них напряжений, пропорциональная ошибке ϕ = ϕ1 – ϕ2 Суммируется алгебраически с напряжением U0 отрицательной местной обратной связи от тахогенератора и поступает на вход усилителя. Он управляет работой электрического исполнительного двигателя. Выходной вал двигателя механически связан через редуктор с объектом управления и движком потенциометра П2. Для улучшения динамических свойств системы в схеме применена местная обратная связь, выполненная в виде тахогенератора.
В этой системе сравниваются не непосредственно углы поворота входной и выходной осей, а пропорциональные им напряжения, снимаемые с потенциометров П1 и П2, которые соответствуют задающему устройству (ЗУ) и измерительному преобразователю (МП). Остальные элементы функциональной схемы соответствуют усилителю (У), электрическому двигателю с редуктором (ИУ) и местной обратной связи, осуществляемой при помощи тахогенератора(КУ), преобразующего скорость вращения в напряжение U0.
Функциональная схема может быть преобразована в эквивалентную ей функциональную схему с одним преобразующим устройством (ПУ), в которой входные и выходные сигналы сравниваются непосредственно.
 |
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 570; Нарушение авторских прав?; Мы поможем в написании вашей работы!