КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Компоновочные схемы АТСС
|
|
|
|
Системы (АТСС)
Автоматизированные транспортно-складские
АТСС является важнейшим компонентом ГПС. Ее функции весьма разнообразны:
- накопление заготовок, полуфабрикатов, изделий, настроенных инструментов и приспособлений;
- транспортирование всех этих объектов к оборудованию;
- транспортирование от оборудования;
- удаление и сортировка отходов.
Анализ внедренных АТСС показывает значительное многообразие вариантов АТСС. Весьма различны и уровни ее автоматизации: от полной автоматизации до автоматизации только складских и транспортных операций (все остальные выполняются оператором).
К АТСС предъявляют следующие общие требования:
- высокий технический уровень устройств;
- необходимая производительность;
- удобство эксплуатации;
- надежность;
- возможность совершенствования и модернизации.
И специальные требования:
- выполнение в автоматическом режиме основных и вспомогательных операций;
- автоматический прием программ с верхнего уровня управления;
- совместимость функциональных компонентов технических и программных с компонентами ГПС;
- возможность замены отдельных программных модулей с добавлением новых в целях усовершенствования и расширения системы;
- обеспечение автоматического контроля и диагностики технических средств;
- создание систем управления на основе микро- и мини-ЭВМ, обладающих необходимым быстродействием, оперативной памятью и допускающих по структуре различную комплектацию и сопряжение.
Компоновочные решения ГПС зависят от компоновочных схем АТСС.
Наибольшее распространение получили следующие схемы:
1. Консольный робот.
2. Портальный робот.
3. Роликовый конвейер.
4. Рельсовая тележка.
5. Индуктивная тележка.
6. Кран-штабелер в составе склада.
Выбирая вариант компоновки ГПС, следует стремиться к минимизации грузопотоков, прямоточности движения деталей при обработке, отсутствию возвратных потоков, минимизации перемещений транспортных средств.
Оценка и выбор наиболее предпочтительного варианта компоновки ГПС являются многофункциональными задачами, для решения которых используют методику имитационного моделирования. При этом должно учитываться рациональное использование площадей, гибкость производственной системы, объемы грузооборота материалов и деталей, применение многостаночного обслуживания, оперативность работы системы, удобство монтажа сборки и ремонта оборудования, соблюдение правил охраны труда и производственной санитарии.
Консольный робот является распространенным способом транспортировки деталей. При этом транспортные линии представляют собой полную окружность или дугу. Оборудование размещается по окружности.
Очевидно, подобные компоновочные решения позволяют компактно разместить станки на производственной площади, требуют малых капитальных вложений, но обладают и определенными недостатками: стесненность компоновки, ограниченное число обслуживаемых станков, малая грузоподъемность, необходимость согласования циклов обработки для ликвидации простоев.
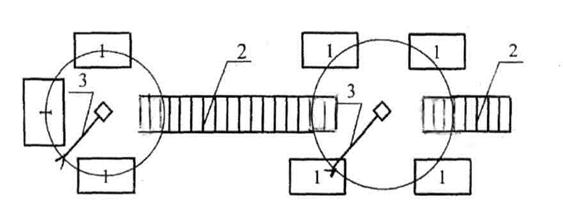
Рис. 11. Консольный робот: 1 – станки; 2 – рольганг;
3 – промышленный робот
Портальный робот. Гибкость транспортной системы в подобных компоновочных решениях высока и оперативна, однако расширение системы проблематично.
Роликовый конвейер. Транспортные линии – прямолинейные, часто образуют замкнутые системы с поворотными стелами в конце ветки, как и надежность, однако гибкость значительно ниже, чем
у других видов транспорта (рис. 13).
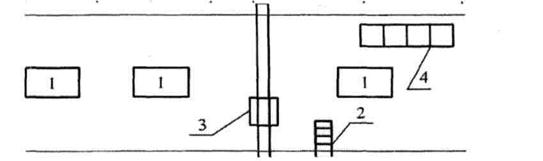
Рис. 12. Портальный робот: 1 – станки; 2 – рольганг;
3 – портальный робот типа "Пирин"; 4 – стеллаж

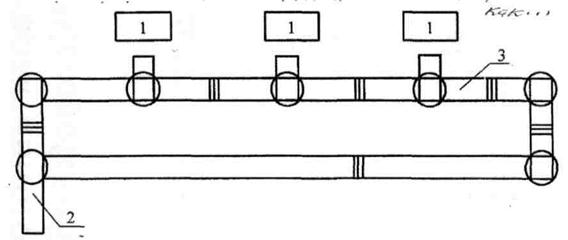
Рис. 13. Роликовый конвейер: 1 – станки; 2 – загрузочный
рольганг; 3 – роликовый конвейер
Рельсовая тележка. Трасса движения – прямолинейна, участок обслуживает одна тележка, нет возможностей для обгонных путей. Оборудование располагается с одной или двух сторон. Применяется транспортная система достаточно широко, так как требует меньше капитальных затрат, характеризуется большой грузоподъемностью, производительностью и надежностью. Часто встречается с другими видами транспорта (рис. 14).
Индуктивная тележка. Использование этого вида транспорта значительно расширяет число возможных вариантов компоновочных решений ГАП. Индуктивная тележка позволяет делать повороты на 90º, 180º на одном месте, радиусные повороты; на трассе, возможна одновременная работа нескольких тележек.
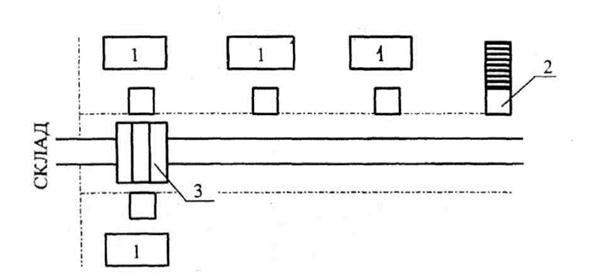
Рис. 14. Рельсовая тележка: 1 – станки; 2 – рольганг загрузки;
3 – рельсовая тележка
Транспортные системы ГАП при использовании индуктивных тележек обладают высокой оперативной и долговременной гибкостью, возможно наращивание системы. Однако высокая стоимость, сложность системы управления, меньшая надежность функционирования создает ограничения для применения компоновочного решения с индуктивными тележками (рис. 15).
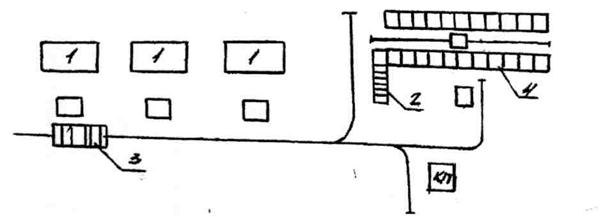
Рис. 15. Индуктивная тележка: 1 – станки; 2 – загрузочный
рольганг; 3 – индуктивная тележка; 4 – склад
Кран-штабелер в составе склада. Трасса движения транспорта прямолинейная. Оборудование располагается с двух сторон от склада. Складская система состоит из одного или двух стеллажей.
Компоновочное решение с кран-штабелером обладает высокой производительностью, оперативностью и гибкостью. Возможно расширение системы (рис. 16).
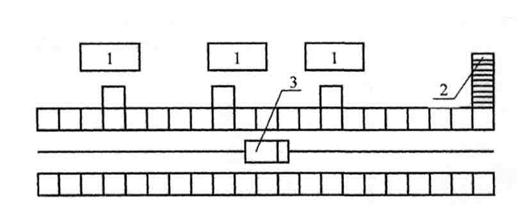
Рис. 16. Кран-штабелер с составе склада:
1 – станки; 2 – загрузочный рольганг; 3 – кран-штабелер
АТСС состоит из двух подсистем: автоматизированной складской подсистемы (АСС) и автоматизированной транспортной подсистемы (АТС).
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 952; Нарушение авторских прав?; Мы поможем в написании вашей работы!