КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Контрольні запитання. Фаззі-керування гальмуванням візка мостового
|
|
|
|
Крана
Фаззі-керування гальмуванням візка мостового
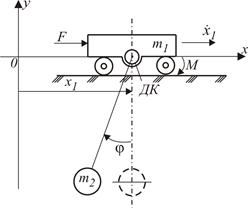
При русі візка мостового крана вантаж, підвішений як маятник, відхиляється в сторону протилежну напряму руху і при зупинці здійснює затухаючі коливання відносно вертикальної осі.
 Чим більша швидкість
Чим більша швидкість
візка масою  тим біль-ший буде кут відхилення
тим біль-ший буде кут відхилення  вантажу масою
вантажу масою  і тим триваліше буде розка-чуватись вантаж, що зни-жує продуктивність мосто-вого крана (рис.14.8). То-му метою керування рухом візка буде його зупинка у будь-якому положенні без розкачування вантажу.
і тим триваліше буде розка-чуватись вантаж, що зни-жує продуктивність мосто-вого крана (рис.14.8). То-му метою керування рухом візка буде його зупинка у будь-якому положенні без розкачування вантажу.
 Зазвичай, досвідчений кранівник, знаючи місце зупинки і спостерігаючи за положенням вантажу, за допомогою командоконтролера так змінює швидкість і момент електродвигуна, щоби зупинити візок без розкачування вантажу. Фаззі-регулятор повинен замінити оператора. Для цього на візку додатково встановлюють давач кута відхилення маятникової підвіски від вертикалі ДК.
Зазвичай, досвідчений кранівник, знаючи місце зупинки і спостерігаючи за положенням вантажу, за допомогою командоконтролера так змінює швидкість і момент електродвигуна, щоби зупинити візок без розкачування вантажу. Фаззі-регулятор повинен замінити оператора. Для цього на візку додатково встановлюють давач кута відхилення маятникової підвіски від вертикалі ДК.
Візок з підвішеним вантажем як об’єкт керування є складною двомасовою системою, яка описується рівнянням Логранжа другого роду для координат мас і [3]. При нехтуванні силами тертя матимемо:
 ;
;  ;
;
(14.13)
 ,
,
де Т – кінетична енергія системи;  – швидкість маси ;
– швидкість маси ;  – ку-това швидкість маси ;
– ку-това швидкість маси ;  – довжина маятникової підвіски;
– довжина маятникової підвіски;  – прискорення вільного падіння;
– прискорення вільного падіння;  – сила, яка діє на ві-зок;
– сила, яка діє на ві-зок;  – радіус приведення передачі,
– радіус приведення передачі,  – ККД передачі.
– ККД передачі.
Після диференціювання (14.13) отримаємо такі рівняння:
 ;
;
 . (14.14)
. (14.14)
Розв’язавши (14.14) відносно кута за умови  , одержимо
, одержимо
 . (14.15)
. (14.15)
Якщо електродвигун живити від керованого джерела моменту, наприклад, від частотного перетворювача з прямим керуванням мо-менту, то сила  буде пропорційною вихідній напрузі регулятора.
буде пропорційною вихідній напрузі регулятора.
Виконати синтез регулятора аналітичним шляхом об’єктом, який описується рівнянням (14.15), практично неможливо. Керувати та-ким об’єктом можна за допомогою ФР за лінгвістичним алгоритмом у виді двох умов:
Ø якщо маса відхиляється від вертикалі з деякою швидкіс-тю, то до маси потрібно прикласти силу , яка буде її рухати приблизно з тією ж швидкістю і у тому ж напрямі;
Ø якщо маса відхилена на деякий кут і її швидкість близь-ка до нуля, то до маси потрібно прикласти силу у тому ж на-прямі, яка надасть масі прискорення, приблизно рівне прискоре-нню маси .
Згідно з наведеними алгоритмами потрібно скласти таблицю правил для ФР з двома вхідними змінними: кутом відхилення маси від вертикалі і кутовою швидкістю  . Оскільки і
. Оскільки і  можуть мати додатні й від’ємні значення, то їх представимо по п’ять термів кожну (NB, NM, Z, PM, PB), a вихідну змінну – се-ми термами (NB, NM, NS, Z, PS, PM, PB). Таблицю правил скла-дають так:
можуть мати додатні й від’ємні значення, то їх представимо по п’ять термів кожну (NB, NM, Z, PM, PB), a вихідну змінну – се-ми термами (NB, NM, NS, Z, PS, PM, PB). Таблицю правил скла-дають так:
Ø згідно першої умови заповнюють стовпець таблиці для 
 , користуючись правилами фаззі-логіки: якщо
, користуючись правилами фаззі-логіки: якщо  і
і  , то
, то  ; якщо
; якщо  і
і  , то
, то  і т. д.;
і т. д.;
Ø згідно другої умови заповнюють рядок для  : якщо і
: якщо і  ,то
,то  і т. д. Останні клітинки таблиці для
і т. д. Останні клітинки таблиці для  і
і  заповнюють за результатами об’єднання відповід-них термів:
заповнюють за результатами об’єднання відповід-них термів:
 ;
;  і т. д.
і т. д.
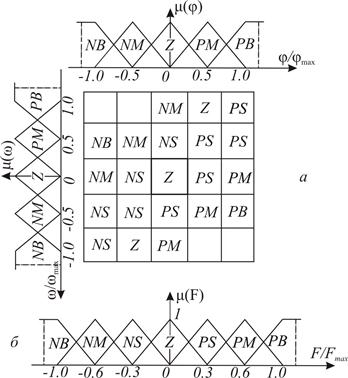
Рис. 14.9. Таблиця правил фаззі-регулятора (а) і функції належності вихідної
змінної (б)
Для тих поєднань термів, які не виникають, відповідні клітинки таблиці залишаються незаповненими (рис.14.9,а)
Наведену таблицю доповнюють функціями належності вхідних змінних у відносних одиницях. Для цього експерт повинен визначи-ти можливий діапазон зміни . Нехай  , тоді
, тоді  . Для і
. Для і 

 , а
, а  .
.
Фаззі-множини і функції належності вихідної змінної наведені на рис.14.9,б. Максимальну силу, що діє на візок, визначаємо за потужністю двигуна:
 , (14.16)
, (14.16)
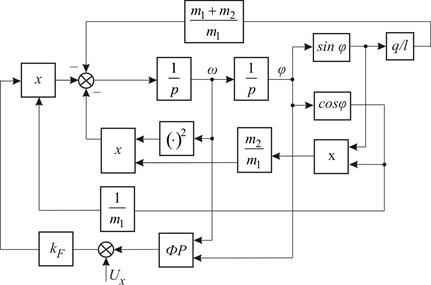
Рис. 14.10. Структурна схема моделювання системи фаззі-керування
де  – потужність двигуна;
– потужність двигуна;  – номіна-льна швидкість двигуна;
– номіна-льна швидкість двигуна;  – ККД редуктора;
– ККД редуктора;  – коефіцієнт передачі редуктора;
– коефіцієнт передачі редуктора;  – радіус коліс візка. Мож-ливий діапазон сили
– радіус коліс візка. Мож-ливий діапазон сили  .
.
 На підставі наведених на рис. 14,9 таблиці і функцій належності складають програму ро-боти ФР. Перевірку складеного алгоритму виконують шляхом мо-делювання системи фаз-зі-керування, представи-вши об’єкт керування рівнянням (14.15). Резу-льтати моделювання при подачі на вхід мо-делі сигналу
На підставі наведених на рис. 14,9 таблиці і функцій належності складають програму ро-боти ФР. Перевірку складеного алгоритму виконують шляхом мо-делювання системи фаз-зі-керування, представи-вши об’єкт керування рівнянням (14.15). Резу-льтати моделювання при подачі на вхід мо-делі сигналу  у виді прямокутного імпульсу для
у виді прямокутного імпульсу для  кг,
кг, 
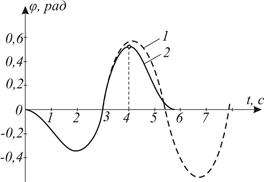
 кг і м предс-тавленно на рис.14.11. Без ФР маса здійснювала незатухаючі коливання відносно вертикальної осі (крива 1). При включеному ФР в момент часу
кг і м предс-тавленно на рис.14.11. Без ФР маса здійснювала незатухаючі коливання відносно вертикальної осі (крива 1). При включеному ФР в момент часу  зменшили до нуля і вантаж зупинився за час, дещо більший чверті періода незатухаючих коливань (крива 2 на рис. 14.11).
зменшили до нуля і вантаж зупинився за час, дещо більший чверті періода незатухаючих коливань (крива 2 на рис. 14.11).
Реалізувати даний ФР можна за допомогою програмованого ло-гічного контролера, який може виконувати процедури фаззіфікації, логічного висновку і дефаззіфікації, написані, наприклад, мовою С++.
1. Які параметри автоматизованого електропривода можуть змі-нюватись?
2. На які види поділяють безпошукові адаптивні системи керува-ння?
3. Якою ланкою можна представити еталонну модель?
4. Які є умови реалізації керування за еталонною моделлю?
5. У чому відмінність фаззі-керування від керування за класич-ною логікою?
6. Чим характеризуються фаззі-множини?
7. Що представляють собою терми?
8. На підставі чого визначають кількість термів?
9. З яких елементів складається фаззі-регулятор?
10. Як проводять перевірку систем керування з фаззі-регулятора-ми?
ЛЕКЦІЯ 15
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 437; Нарушение авторских прав?; Мы поможем в написании вашей работы!