КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дискретні передавальні функції і структурні схеми
|
|
|
|
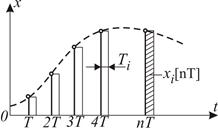 Математичною основою опису динаміки електропривода з ЦСК без врахування квантування за рівнем є теорія імпульсних систем, оскільки неперервний сигнал
Математичною основою опису динаміки електропривода з ЦСК без врахування квантування за рівнем є теорія імпульсних систем, оскільки неперервний сигнал  перетворюється у квантований за часом імпульсний сигнал
перетворюється у квантований за часом імпульсний сигнал  з амплітудно-імпульсною модуляцією з
з амплітудно-імпульсною модуляцією з  . При цьому амплітуда імпульсу дорівнює миттєвому значенню
. При цьому амплітуда імпульсу дорівнює миттєвому значенню  на початку періоду дискретності
на початку періоду дискретності  (рис. 16.3).
(рис. 16.3).
 За
За  послідовність імпульсних сигналів перетво-рюється у так звану решітчас-ту функцію
послідовність імпульсних сигналів перетво-рюється у так звану решітчас-ту функцію  , цілечисельний аргумент якої визначається номером такта
, цілечисельний аргумент якої визначається номером такта  часової дискретності. Розрахун-ки імпульсних систем, як і систем аналогових, проводять з ви-користанням перетворення Лапласа, але у формі дискретного
часової дискретності. Розрахун-ки імпульсних систем, як і систем аналогових, проводять з ви-користанням перетворення Лапласа, але у формі дискретного  - пе-ретворення:
- пе-ретворення:
 , (16.11)
, (16.11)
де  – решітчаста функція – оригінал;
– решітчаста функція – оригінал;  – зображення ре-шітчастої функції;
– зображення ре-шітчастої функції;  .
.
Пристрій, який формує послідовність імпульсів в залежності від вхідного сигналу, називається імпульсним елементом. Миттєвий імпульс представляють дельта-функцією:
 при
при  ;
;
 при
при  , (16.12)
, (16.12)
зображення якої  . Згідно (16.12) імпульсний елемент опи-сується рівняннями
. Згідно (16.12) імпульсний елемент опи-сується рівняннями
 при
при  ;
;
 при
при  . (16.13)
. (16.13)
Зображення його вихідного сигналу
 . (16.14)
. (16.14)
За умови  імпульсний елемент представляють ланкою перетворення неперервного сигналу у послідовність імпульсів
імпульсний елемент представляють ланкою перетворення неперервного сигналу у послідовність імпульсів  і екстраполятора (рис.16.4), вихідна величина якого
і екстраполятора (рис.16.4), вихідна величина якого
 . (16.15)
. (16.15)
Зображенням (16.15) є функція
 ,
,
оскільки зображенням за Лапласом одиничної функції  є
є  .
.
За вхідного сигналу передавальна функція екстраполятора
 . (16.16)
. (16.16)
Екстраполятор разом з неперервною ланкою називають приведе - ною ланкою, передавальна функція якої
 , (16.17)
, (16.17)
де  – передавальна функція неперервної ланки.
– передавальна функція неперервної ланки.
Остання ланка на рис. 16.4 здійснює перетворення вихідного сиг-налу  неперервної ланки у решітчасту функцію
неперервної ланки у решітчасту функцію  .
.

Рис. 16.4. Структурна схема імпульсного елемента і неперервної ланки
Застосувавши  -перетворення до (16.17), отримаємо дискретну передавальну функцію приведеної ланки:
-перетворення до (16.17), отримаємо дискретну передавальну функцію приведеної ланки:
 . (16.18)
. (16.18)
Оскільки  є зображення функції , то
є зображення функції , то  є зображе-нням перехідної функції
є зображе-нням перехідної функції  неперервної ланки, тобто це реакція неперервної ланки на одиничний імпульс. Отже, можна записати, що
неперервної ланки, тобто це реакція неперервної ланки на одиничний імпульс. Отже, можна записати, що  і дискретна передавальна функція
і дискретна передавальна функція
 , (16.19)
, (16.19)
де  – перехідна решітчаста функція неперервної ланки.
– перехідна решітчаста функція неперервної ланки.
На підставі структурної схеми на рис. 16.4 складають структурну схему замкненого контуру цифрової системи керування електро-приводом (рис. 16.5). Неперервною ланкою у цій схемі є об’єкт ке-рування з передавальною функцією  , вихідною змінною якою може бути струм, момент, кутова швидкість чи переміщення.
, вихідною змінною якою може бути струм, момент, кутова швидкість чи переміщення.
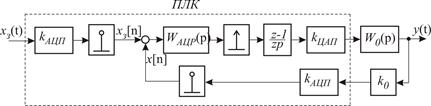
Рис. 16.5. Структурна схема цифрового контуру регулювання
Для даної структурної схеми дискретна передавальна функція приведеної ланки
 . (16.20)
. (16.20)
Дискретна передавальна функція розімкненого контуру
 , (16.21)
, (16.21)
де  – дискретна передавальна функція цифрового регулято-ра.
– дискретна передавальна функція цифрового регулято-ра.
Щоби визначити динамічні показники наведеної системи регу-лювання, необхідно розрахувати перехідну функцію замкненого контуру  для вхідного сигналу
для вхідного сигналу  , за якою визначають перерегулювання і час регулювання. Дійсний перехідний процес
, за якою визначають перерегулювання і час регулювання. Дійсний перехідний процес  розраховують за передавальною функцією замкненої системи
розраховують за передавальною функцією замкненої системи
 , (16.22)
, (16.22)
використавши формули розкладання функції  , або методом різницевих рівнянь.
, або методом різницевих рівнянь.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 1035; Нарушение авторских прав?; Мы поможем в написании вашей работы!