КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Синтез цифрового регулятора і його реалізація
|
|
|
|
Зазвичай, при синтезі цифрового регулятора, як і аналоговою, є відомою приведена цифрова передавальна функція  . За цієї умови задаються динамічними показниками у виді бажаної неперер-вної перехідної функції замкненого контуру
. За цієї умови задаються динамічними показниками у виді бажаної неперер-вної перехідної функції замкненого контуру  . Цю функцію для вибраного періоду квантування
. Цю функцію для вибраного періоду квантування  переводять у решітчасту
переводять у решітчасту  . Бажана дискретна передавальна функція контуру згідно (16.19)
. Бажана дискретна передавальна функція контуру згідно (16.19)
 . (16.23)
. (16.23)
Бажана дискретна передавальна функція розімкненого контуру
 . (16.24)
. (16.24)
Тоді згідно (16.21) дискретна передавальна функція цифрового регулятора з врахуванням (16.20)
 .
.
(16.25)
Рівняння (16.25) визначає тип і параметри цифрового регулято-ра. Якщо обчислення передавальної функції за (16.25) складне, то за умови, що період квантування
 , (16.26)
, (16.26)
де  – час досягнення вихідним сигналом рівня 95% від устале-ного значення при подачі на вхід силової частини електропривода ступінчастого сигналу, цифровий регулятор можна представити різ-ницевим рівнянням, яке є прототипом диференціального рівняння.
– час досягнення вихідним сигналом рівня 95% від устале-ного значення при подачі на вхід силової частини електропривода ступінчастого сигналу, цифровий регулятор можна представити різ-ницевим рівнянням, яке є прототипом диференціального рівняння.
Найбільш досконалим є ПІД-регулятор, алгоритм дії якого опи-сується рівняння
 , (16.27)
, (16.27)
де  – коефіцієнт підсилення регулятора
– коефіцієнт підсилення регулятора  і
і  – відповідно ста-лі інтегрування і диференціювання. Щоби перетворити диференціа-льне рівняння (16.27) у різницеве, потрібно похідну замінити різни-цею першого порядку, а інтеграл – сумою. Обчислення дискретної суми складне в реалізації, тому його можна уникнути, про диферен-ціювавши (16.27).
– відповідно ста-лі інтегрування і диференціювання. Щоби перетворити диференціа-льне рівняння (16.27) у різницеве, потрібно похідну замінити різни-цею першого порядку, а інтеграл – сумою. Обчислення дискретної суми складне в реалізації, тому його можна уникнути, про диферен-ціювавши (16.27).
В результаті одержимо
 . (16.28)
. (16.28)
Аналогом диференціала І-го порядку неперервної функції є пер-ша обернена різниця

і ІІ-го порядку обернена різниця

 .
.
Підставивши різницеві обернені різниці в (16.28), отримаємо

або
 , (16.29)
, (16.29)
де  ;
;  ;
;  .
.
Розрахунок величини керуючої дії на кожному такті  пот-рібно проводити у відповідності з (16.29), тобто до попереднього значення керуючої дії
пот-рібно проводити у відповідності з (16.29), тобто до попереднього значення керуючої дії  треба добавити величину приросту, обчислену на інтервалі квантування:
треба добавити величину приросту, обчислену на інтервалі квантування:
 , (16.30)
, (16.30)
де  . За алгоритма (16.30) обчислюється тільки поточний приріст керуючої дії і тому цей алго-ритм називають швидкісним.
. За алгоритма (16.30) обчислюється тільки поточний приріст керуючої дії і тому цей алго-ритм називають швидкісним.
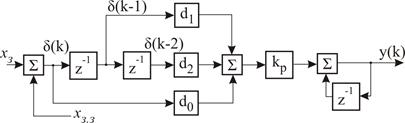
Рис. 16.6. Структурна схема швидкісного ПІД-регулятора
На структурній схемі через  позначена ланка затримки сигна-лу на один період квантування. Наведена схема спрощує написання програми реалізації цифрового регулятора на базі ПЛК. Для зберіга-ння керуючої дії можна використати регістр-накопичувач, а для зберігання трьох послідовних вибірок змінних
позначена ланка затримки сигна-лу на один період квантування. Наведена схема спрощує написання програми реалізації цифрового регулятора на базі ПЛК. Для зберіга-ння керуючої дії можна використати регістр-накопичувач, а для зберігання трьох послідовних вибірок змінних  ,
,  і
і  – три послідовні комірки пам’яті даних. Оскільки регуля-тор повинен бути перенастроюваним, то для збереження коефіцієн-тів
– три послідовні комірки пам’яті даних. Оскільки регуля-тор повинен бути перенастроюваним, то для збереження коефіцієн-тів  ,
,  ,
,  і можна використати чотири послідовні комірки оперативної пам’яті.
і можна використати чотири послідовні комірки оперативної пам’яті.
Отже, згідно (16.30) синтез цифрового регулятора зводиться до визначення коефіцієнтів ,і , величина яких залежить від періоду квантування , і коефіцієнта підсилення регулятора . Встановлено, що величина впливає на похибку регулювання: чим менша , тим більше дискретний закон регулювання набли-жається до неперервного, який описується рівнянням (16.27). Але зменшення періоду квантування вимагає зменшення часу обчислен-ня керуючої дії на кожному такті і призводить до збільшення впли-ву завад. Тому необхідно шукати компромісне рішення.
Американські вчені Зіглер і Нікольс рекомендують приймати  , де
, де  – період критичних коливань об’єкта керування. За такого вибору рекомендують такі співвідношення:
– період критичних коливань об’єкта керування. За такого вибору рекомендують такі співвідношення:
 і
і  . (16.31)
. (16.31)
Тоді залишається визначити лише коефіцієнт підсилення регуля-тора , який знаходять за монограмами,  , де
, де  і
і  – відповідно коефіцієнт передачі і стала часу об’єкта керування
– відповідно коефіцієнт передачі і стала часу об’єкта керування  .
.
Цифрові системи керування мають такі переваги у порівнянні з аналоговими як простота задання програми і зміни алгоритма, висока надійність і завадостійкість, малі габарити і висока ступінь інтеграції. Це сприяє їх широкому застосуванню в електроприводах багатьох виробничих механізмів.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 489; Нарушение авторских прав?; Мы поможем в написании вашей работы!