КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основы теории автоматического управления
|
|
|
|
Управление техническим (технологическим) объектом обычно состоит в выработке команд, реализация которых обеспечивает целенаправленное изменение состояния объекта при соблюдении заданных требований и ограничений.
В зависимости от уровня автоматизации производства под объектом управления (ОБ) понимают отдельный аппарат, машину, агрегат, технологический участок, технологическую линию или цех.
Состояние объекта в отношении цели управления определяется текущими значениями некоторого числа контролируемых переменных, получивших название управляемых величин объекта.
Воздействия, получаемые объектом со стороны внешней среды и приводящие к нежелательным отклонениям управляемых величин, называют возмущающими воздействиями или возмущениями.
Изменение управляемых величин в соответствии с целью управления, например, поддержание их на неизменном уровне, осуществляется подачей на объект специально организованных управляющих воздействий.
Управление, осуществляемое без участия человека, называют автоматическим, а техническое устройство, выполняющее в этом случае функции управления, - автоматическим управляющим устройством или контроллером (регулятором). Объект управления и контроллер во взаимодействии друг с другом образуют систему автоматического управления.
В процессе работы контроллер получает текущую информацию о цели управления, о текущем состоянии объекта управления и среды его функционирования. В соответствии с полученной информацией контроллер формирует управляющие воздействия на объект таким образом, чтобы была достигнута цель управления.
Схематичное изображение отдельных элементов системы (обычно в виде прямоугольников) и воздействий в виде векторов, действующих на систему из внешней среды, называют структурной схемой системы автоматического управления. В отношении выполняемых элементами системы функций всякая система управления состоит, как минимум, из двух основных элементов: управляемого объекта, в котором протекает технический (технологический) процесс, и контроллера, осуществляющего функции управления этим процессом (рисунок 1а). Система, имеющая такую структуру, может быть работоспособной только при выполнении следующих условий: на объект управления не действуют никакие возмущения, математическая модель объекта известна для любого момента времени, требуемый алгоритм управления контроллера может быть реализован с необходимой точностью. Нарушение хотя бы одного из указанных условий приводит к отклонению управляемой величины от желаемого значения. Чтобы этого не происходило, вводят добавочный информационный канал, по которому контроллер получает информацию о действительном значении управляемой величины – обратную связь. Это позволяет при появлении отклонения управляемой величины от желаемого значения контроллеру осуществить дополнительное изменение управляющего воздействия на объект, чтобы ликвидировать появившееся отклонение (рисунок 1б).
|
|
|
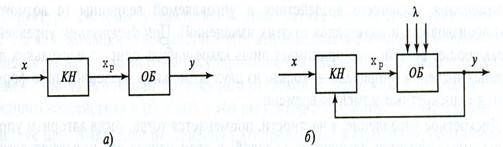
Рис. 1 – Схемы простейших систем управления: а – прямое управление; б – управление с обратной связью (по отклонению), здесь:
х – задающее воздействие, хр – управляющее воздействие регулирующего органа, у - управляемая величина, λ – возмущения; КН – контроллер, ОБ – объект управления.
Канал, по которому информация с выхода системы о значении управляемой величины передаётся на вход контроллера, называют каналом обратной связи. В системе с обратной связью есть замкнутый контур, поэтому такие системы называют замкнутыми системами управления (рис. 1 б). Соответственно систему управления без обратной связи называют разомкнутой системой управления (рис. 1 а).
|
|
|
В зависимости от характера сигнала задания (задающего воздействия) системы управления принято разделять на три вида:
1. Стабилизации, если задающее воздействие не изменяется во времени.
2. Программного управления, если задающее воздействие является заранее известной (детерминированной) функцией времени.
3. Зависимого управления, или следящей, если задающее воздействие является неопределённой в будущем функцией времени.
Управление называется непрерывным, если осуществляемое контроллером изменение управляющего воздействия происходит в непрерывной зависимости от изменения задающего воздействия и управляемой величины. В случае дискретного управления управляющее воздействие принимает лишь какое-нибудь одно из нескольких возможных значений (в пределе – только из двух значений) либо формируется контроллером в дискретные моменты времени.
Дискретное управление применяется тогда, когда алгоритм управления имеет характер логических условий; в этом случае управление называют логическим. Логическое управление чаще всего применяется в режимах пуска или остановки технического объекта, когда необходимо в определённой последовательности вводить в действие отдельные двигатели, механизмы, устройства. В практике при управлении сложными техническими (технологическими) объектами непрерывное и дискретное управления применяют совместно.
Как правило, из общей задачи управления выделяют задачу устранения влияния на достижение цели управления действующих на объект неконтролируемых возмущений, а также погрешности, возникшей при реализации в техническом устройстве алгоритма управления. Эта задача решается в структуре замкнутой части системы управления, которая называется подсистемой автоматического регулирования. В результате разделения функций системы управления контроллер представляет собой два соподчинённых блока:
- регулирующий блок, осуществляющий функции регулирования; его обычно называют автоматическим регулятором или просто регулятором;
- командный блок, вырабатывающий командное воздействие на регулятор таким образом, чтобы была достигнута цель управления.
|
|
|
Рассмотренная система управления (рис. 2) может считаться двухуровневой: первый (нижний) уровень образует подсистема регулирования; второй – командный блок, а в качестве объекта выступает подсистема регулирования. Такого рода двухуровневые (многоуровневые) структуры систем управления получили название иерархических структур систем управления.
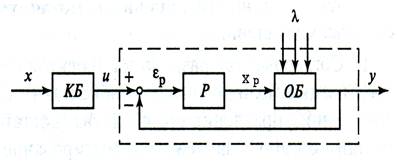
Рис. 2 – Схема двухуровневой системы управления: КБ – командный блок, Р – регулятор, ОБ – объект регулирования, х – задание, u – управляющее воздействие, y – управляемая величина, хр – регулирующее воздействие, εр – сигнал рассогласования, λ – возмущения.
Сигнал рассогласования является функцией времени: εр (t)= x(t) - y(t).
В предыдущих схемах систем управления неполнота информации о состоянии объекта обусловлена тем, что регулятор контролирует лишь отклонение регулируемой величины, как конечный результат действия различных возмущений на объект регулирования. Схема системы управления, в которой регулятор получает добавочную информацию об изменении возмущения λк(t), приведена на рис.3:
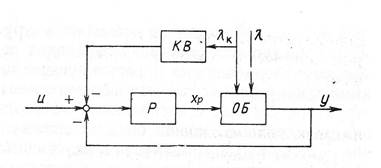
Рис. 3. – Схема системы автоматического регулирования с компенсацией возмущения или комбинированная.
Здесь обозначено КВ – блок компенсации возмущения, λк – компенсируемое возмущение. Такие системы получили название систем регулирования с компенсацией возмущений или комбинированные.
На рис. 4 приведен пример комбинированной системы автоматического регулирования ремпературы в мясной промышленности.
Системы с несколькими замкнутыми контурами называют многоконтурными. В практике автоматизации в ряде случаев приемлемое качество регулирования достигается и при отсутствии командного блока, т.е. x(t) = u(t). Системы с одним замкнутым контуром называют одноконтурными.
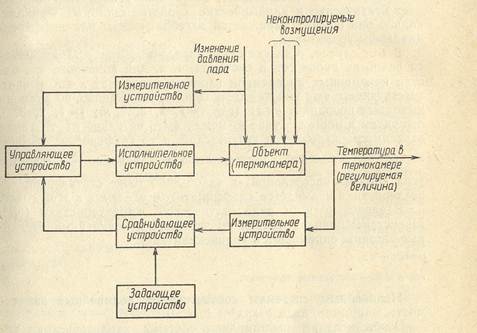
Рис. 4. Пример схемы комбинированной системы автоматического регулирования температуры в термокамере.
Объектом регулирования называется технологический аппарат, агрегат или машина, в которой осуществляется процесс регулирования одного или нескольких физических параметров. Регулируемой величиной или регулируемым параметром называется физическая величина (температура, давление, расход, уровень и т.д.), значение которой должно поддерживаться постоянным или изменяться по программе. Регулирующим воздействием называется воздействие на объект регулирования со стороны регулятора.
|
|
|
Объекты регулирования характеризуются тем, что через них непрерывно протекает вещество или энергия. Количества вещества или энергии, протекающей через объект или отбираемой от объекта, называется нагрузкой. Изменение нагрузки приводит к изменению регулируемого параметра; чтобы поддержать регулируемый параметр на заданном уровне, необходимо изменить приток вещества или энергии в объект в соответствии с новым значением нагрузки объекта.
Емкостью объекта регулирования называется количество содержащегося в нем в рассматриваемый момент времени вещества или энергии.
Наиболее неблагоприятные условия для регулирования имеют место при мгновенном (скачкообразном) нарушении баланса между приходом и расходом вещества или энергии в объекте регулирования. Кривая, которая показывает, как изменяется регулируемый параметр  во времени t при скачкообразном возмущении (изменении
во времени t при скачкообразном возмущении (изменении  ) и отключенном регуляторе, называется переходной характеристикой или кривой разгона объекта (рис. 5).
) и отключенном регуляторе, называется переходной характеристикой или кривой разгона объекта (рис. 5).

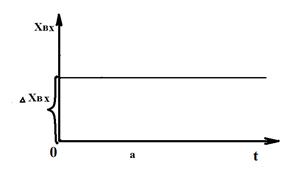
Рис. 5. Переходная характеристика одноемкостного объекта с
самовыравниванием
В некоторых объектах при нарушении равенства притока и расхода вещества или энергии регулируемый параметр принимает новое, постоянное значение без вмешательства извне. Такие объекты обладают свойством самовыравнивания, их называют статическими. У объектов, не обладающих свойствами самовыравнивания, любое изменение регулируемого параметра не оказывает обратного воздействия на приток или расход вещества (энергии), в результате чего параметр будет изменяться непрерывно, такие объекты называются астатическими.
Системы со средствами вычислительной (микропроцесорной) техники в контуре управления относятся к дискретным системам, которые функционируют в дискретном временном пространстве и определяются дискретными состояниями (рис.6) В такой системе, в отличие от непрерывной, управляющее устройство оперирует с дискретными числовыми последовательностями, получаемыми путем квантования по времени непрерывной функции (рис.7). Обычно в цифровых системах квантование производится с постоянным интервалом времени (интервалом дискретности Т). Преобразование непрерывного сигнала в числовую последовательность осуществляется в аналого-цифровом преобразователе (АЦП). В вычислительном устройстве (ВУ) определяется текущее значение управляющего воздействия, которое преобразуется затем из числового (дискретного) в непрерывный (аналоговый) сигнал с помощью цифро-аналогового преобразователя (ЦАП). Для управления технологическими процессами часто используют хорошо исследованные линейные законы регулирования, реализуемые в дискретной форме в ВУ. В этом случае определяют параметры настройки регуляторов, а также рассчитывают интервал дискретности. Управляющее вычислительное устройство (контроллер) одновременно обслуживает несколько контуров управления.
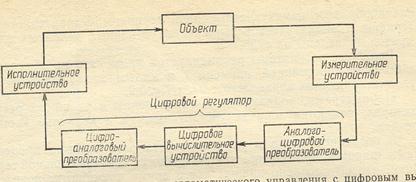
Рис. 6. Структурная схема САР с цифровым вычислительным устройством
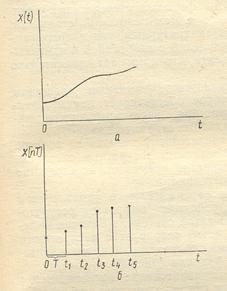
Рис. 7. Графики непрерывной функции (аналоговый сигнал- а) и дискретной последовательности (б -).
|
|
|
Дата добавления: 2014-01-05; Просмотров: 903; Нарушение авторских прав?; Мы поможем в написании вашей работы!