КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системы позиционного (релейного) регулирования
|
|
|
|
В системах автоматического регулирования дискретного (прерывистого) действия применяются регуляторы дискретного релейного типа. Позиционные регуляторы широко используются при автоматизации технологических процессов. Наиболее простым из них является двухпозиционный регулятор (ДПР), у которого рабочий орган может занимать только два положения — полностью открыт или полностью закрыт, что соответствует максимальному и минимальному регулирующему воздействию. Характеристика ДПР приведена графически на рис. 1а, где видно, что отклонение регулируемой величины ∆х от заданного значения xо на величину большую ε (диапазон наибольших отклонений регулируемой величины от заданного значения, не вызывающих срабатывания регулятора), вызывает срабатывание регулятора и управляющее его воздействие равно Qmах или Qmin в зависимости от знака отклонения.
Переходный процесс в статической САР с двухпозиционным регулятором (рис. 8 б) носит характер незатухающих колебаний; на рис. 8 в приведен график соответствующего положения регулирующего органа.
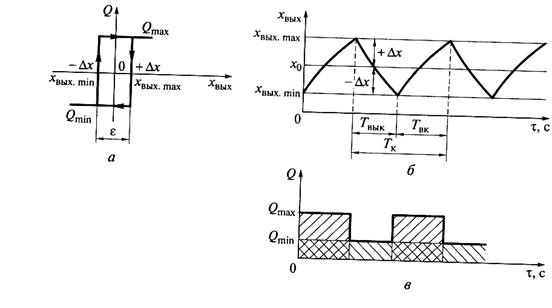
Рис. 8. Система автоматического регулирования с двухпозиционным регулятором:
a — график регулирующего воздействия; б — переходной процесс регулирования; в — положение регулирующего органа
Основными показателями качества колебательного процесса в системе с ДПР являются период колебаний Тк и амплитуда колебаний Тк. Период колебаний равен суммарной продолжительности двух состояний регулирующего органа — во включенном ТВК и выключенном Т вык положениях.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 815; Нарушение авторских прав?; Мы поможем в написании вашей работы!