КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системы регулирования непрерывного действия и законы регулирования
|
|
|
|
В системах автоматического регулирования непрерывного действия применяют регуляторы, у которых при получении сигнала об отклонении регулируемой величины регулирующий орган перемещается плавно и непрерывно до момента установления заданного значения регулируемой величины с определенной степенью точности, обусловленной видом регулятора.
Основной характеристикой регуляторов непрерывного действия является функциональная зависимость между отклонением регулируемой величины и перемещением регулирующего органа. Эта зависимость называется законом регулирования. Характеристики регуляторов непрерывного действия и переходные процессы регулирования в статическом объекте приведены на рис. 9.
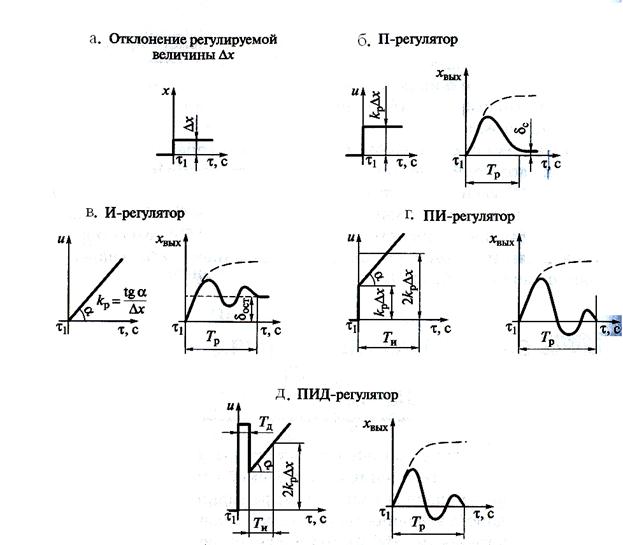
Рис. 9. Характеристики регуляторов непрерывного действия
Пропорциональным (П-регулятором) называется регулятор, у которого перемещение регулирующего органа пропорционально отклонению регулируемой величины от ее заданного значения (Рис.9 б).
Уравнение регулятора имеет вид
и = кр ∆х,
где и — регулирующее воздействие регулятора; кр — коэффициент передачи (или коэффициент усиления) регулятора; ∆х, — отклонение регулируемой величины от заданного значения.
Особенность переходного процесса регулирования в системе с П-регулятором состоит в наличии остаточного отклонения (статической ошибки) δс в его конце.
Достоинством П-регулятора является малое время переходного процесса регулирования, т.е. быстродействие, недостатком — наличие статической ошибки.
Интегральным (И-регулятором) называется регулятор, у которого регулирующее воздействие пропорционально интегралу отклонения регулируемой величины (рис. 9 в).
Уравнение И-регулятора имеет вид
u =  или Tи (dm/dt) = Dx
или Tи (dm/dt) = Dx
где Ти — постоянная времени регулятора, равная продолжительности перемещения регулирующего органа из одного крайнего положения в другое при максимальном отклонении регулируемой величины, с; 1/Ти — скорость перемещения регулирующего органа, пропорциональная степени отклонения регулируемой величины, с-1.
Регулирующее воздействие И-регулятора продолжается до тех пор, пока отклонение регулируемой величины от заданного значения сведется к нулю, т.е. в конце переходного процесса регулирования величина достигает заданного значения.
В момент отключения регулирующий орган может занимать любое положение в пределах своего рабочего хода.
Параметром настройки И-регулятора является скорость перемещения регулирующего органа 1/Ти.
Достоинство И-регулятора заключается в отсутствии остаточного отклонения регулируемой величины в конце регулирования, недостатком — относительно малая скорость (длительность) процесса. В связи с этим рекомендуется применять И-регуляторы в объектах с большим самовыравниванием при плавных изменениях нагрузки.
Пропорционально-интегральным (ПИ-регулятором) называется регулятор, у которого регулирующее воздействие пропорционально отклонению регулируемой величины от заданного значения и интегралу по времени от этого отклонения. Действие данного регулятора можно рассматривать как совместное действие пропорционального и интегрального регуляторов (рис.9 г).
Уравнение регулятора имеет вид
где Ти — продолжительность действия интегральной составляющей регулятора — продолжительность изодромы, с.
Регулирующее воздействие ПИ-регулятора характерно тем, что в первоначальный момент введения его при отклонении регулируемой величины от заданного значения, большое воздействие, снижающее величину отклонения за малый отрезок времени, оказывает пропорциональная составляющая. В последующем большее влияние на процесс регулирования оказывает интегральная составляющая, что обеспечивает исключение статической ошибки в конце процесса регулирования.
Степень введения пропорциональной или интегральной составляющей в ПИ-регулятор определяется соответственно величинами Кр и Ти, которые служат параметрами настройки регулятора.
Достоинство ПИ-регулятора заключается в том, что он поддерживает заданное значение регулируемой величины при возмущениях в объекте и не имеет остаточного отклонения в конце переходного процесса регулирования.
Пропорционалыю-интегрально-дифференциальным (ПИД-регулятором) называется регулятор, у которого регулирующее воздействие пропорционально отклонению регулируемой величины от задания, интегралу и скорости этого отклонения (рис.9 д). Уравнение регулятора имеет вид
 + ТД [d(∆х)/dτ].
+ ТД [d(∆х)/dτ].
Параметрами настройки ПИД-регулятора являются параметры Кр, Ти , ТД .
Из всех рассмотренных автоматических регуляторов ПИД-регулятор наиболее сложный как по принципу действия, так по устройству и наладке. ПИД-регуляторы целесообразно применять на инерционных объектах с большим запаздыванием и жесткими технологическими требованиями к процессу регулирования. И-регулятор практического применения не имеет, а входит как составляющий в структуру сложных ПИ- и ПИД-регуляторов.
Показатели качества переходного процесса регулирования
Выделяют следующие показатели качества процесса регулирования (рис.10):
1. Время регулирования  .
.
2. Степень затухания  , где А1, А2 – амплитуды первого и второго колебательного процесса.
, где А1, А2 – амплитуды первого и второго колебательного процесса.
3. Статическая ошибка регулирования  , в значение которой входит и зона нечувствительности регулятора.
, в значение которой входит и зона нечувствительности регулятора.


 А1
А1





 0
0 


Рис. 10. Примерный вид колебательного переходного процесса в системе автоматического регулирования.
Вопросы и задания для самопроверки. Темы для обсуждения.
1. Основные понятия теории автоматического управления.
2. Что понимается под объектом автоматического управления?
3. Приведите схемы прямой и обратной связи в кибернетике.
4. Замкнутые системы автоматического управления.
5. Системы регулирования по принципу компенсации.
6. Комбинированные системы автоматического регулирования.
7. Приведите примеры регулируемой величины и регулирующего воздействия.
8. Что такое «закон регулирования»? Типовые законы регулирования.
9. САР с цифровым вычислительным устройством. Аналоговые и дискретные сигналы.
10. Особенности позиционного регулирования.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 662; Нарушение авторских прав?; Мы поможем в написании вашей работы!