КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Алгебраические критерии устойчивости. Адсорбция. Типовое решение автоматизации (рис.7)
|
|
|
|
Адсорбция. Типовое решение автоматизации (рис.7)
Абсорбция. Типовое решение автоматизации (рис. 7)
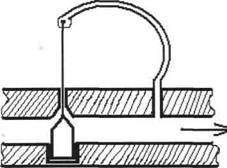
В качестве объекта управления процессом абсорбции примем абсорбционную установку, состоящую из абсорбционной колонны 2 и двух холодильников - на линиях абсорбента 3 и газовой смеси 1. Показателем эффективности процесса является концентрация извлекаемого компонента в обедненной смеси, а целью управления - достижение определенного (минимального возможного для данных производственных условий) значения этой концентрации. Концентрация YH определяется разностью количеств извлекаемого компонента, поступающего с газовой смесью и поглощаемого из нее абсорбентом.
Количество компонента, поступающего в колонну, рассчитывается по уравнению:
М – Fс-Yн,
т.е. однозначно определяется расходом газовой смеси Fc и начальной концентрацией в ней извлекаемого компонента YH.
Количество компонента, который переходит из газовой фазы в жидкую, определяется:
M'=K-S-Δ, где К - коэффициент массопередачи;
S - поверхность контакта;
Δ - средняя движущая сила процесса.
В качестве регулируемой величины выбирают концентрацию YH, a регулирующее воздействие реализуют изменением отношения расходов FA/FС - абсорбент-сырье. Для улучшения качества регулирования показателя эффективности предусматриваются регуляторы расхода Fc, температур сырья и абсорбента, и давления в колонне.
В нижней части абсорбера должно находиться некоторое количество жидкости, обеспечивающее гидравлический затвор, что исключает поступление газовой смеси из абсорбера в линию насыщенного абсорбента и позволяет регулировать давление в абсорбере. Постоянное количество этой жидкости поддерживается регулированием уровня в абсорбере путем изменения расхода насыщенного абсорбента.
Контролируемыми параметрами являются: расход и температура исходного и насыщенного абсорбента, расход и температура исходной и обедненной газовой смеси, хладоносителей, а также концентрация извлекаемого компонента в обедненной смеси, уровень в нижней части колонны, температура по высоте колонны, давление и перепад давлений в ней.
Сигнализации подлежат отклонения давления в колонне от предельных значений.
Схемой автоматизации предусмотрено устройство защиты, исключающее значительное повышения давления в колонне, при срабатывании защиты прекращается питание регуляторов, перекрываются регулирующие органы на всех магистралях, а на магистрали обедненной смеси - открываются.
В качестве объекта управления рассмотрим противоточный непрерывнодействующий аппарат 1 с кипящим слоем мелкозернистого адсорбента на тарелках 2. На верхнюю тарелку такого аппарата подается адсорбент с помощью дозатора 3. Под действием силы тяжести адсорбент проваливается с тарелки на тарелку и выводится из нижней части аппарата, газ же движется снизу вверх и выводится из верхней части адсорбера. Показатель эффективности, цель управления и закономерности такого процесса адсорбции аналогичны процессу абсорбции, поэтому типовые решения автоматизации этих процессов одни и те же. Основным контуром
регулирования является регулятор концентрации адсорбируемого компонента в отходящем газе, а регулирующее воздействие осуществляется изменением расхода адсорбента (корректировкой работы дозатора 3). Для устранения возмущения по каналу расхода газовой смеси этот расход стабилизируется.
Контролю подлежат расход газовой смеси, конечная концентрация адсорбируемого компонента, температуры газовой смеси и адсорбента, температура по высоте адсорбера, давление в верхней и нижней частях колонны, перепад давлений между ними.
Сигнализации подлежат концентрация адсорбируемого компонента в отходящем газе и давление в колонне. При резком возрастании давления в колонне должно сработать устройство защиты.
Автоматический регулятор - это средство автоматизации, получающее, усиливающее и преобразующее сигнал отклонения регулируемой величины и целенаправленно воздействующее на объект регулирования; он обеспечивает поддержание заданного значения регулируемой величины или изменение её значения по заданному закону.
По виду регулируемого параметра автоматические регуляторы подразделяются на регуляторы температуры, давления, разряжения, расхода, уровня, состава, содержания вещества и т.п.
В зависимости от источника используемой энергии автоматические регуляторы (А.Р) подразделяются на (А.Р) прямого и непрямого действия.
В (А.Р) прямого действия одновременно с изменением регулируемой величины от объекта регулирования отбирается часть энергии, которая используется для работы регулятора и воздействия на его исполнительный механизм - регулирующий орган объекта регулирования. Таким образом, к автоматической системе «объект - регулятор» энергия из вне не подводится. (рис...)(А.Р)
(рис..)
(А.Р) непрямого действия для работы регулятора и воздействия на его исполнительный механизм подводится энергия из вне.
Типовые законы регулирования. Пропорциональные регуляторы (П - регуляторы) Передаточная ƒ W(p) = Кр
Переходные процессы в П - регуляторе описываются выражением
μ = -Крε
Выходная величина обратно пропорциональна входной величине
Где ε - входное воздействие на регулятор равное отклонению
регулируемой величины от заданного значения;
μ - воздействие регулятора на объект, направленное на ликвидацию
отклонения регулируемой величины от заданного значения;
Кр -коэффициент передачи регулятора являющийся параметром его
настройки.
Интегральные регуляторы (И - регуляторы)

Выходная величина такого регулятора пропорциональна интегралу от входной величины

Ти - постоянная времени интегрирования - параметры настройки.
Основное назначение закона И - регулирования - ликвидация установившейся ошибки регулирования.
В качестве самостоятельных И - регуляторы применяют редко из-за медленного нарастания регулирующего воздействия на объект при отклонении регулируемой величины.
Очень часто закон И - регулирования формируется не самостоятельным регулятором, а устройством являющимся составной частью регулятора реализующий более сложный закон регул. например пропорционально- интегральный закон регулирования.
Пропорционально- интегральный регулятор (ПИ - регулятор)
Для комплексного использования преимущество законов П - и И -регулирования широко применяются регуляторы формирующие законы как П- так и И - регулирования одновременно.
ПИ - регуляторы оказывают воздействие на регулирующий орган пропорционально отклонению регул. величины и интегралу от отклонения регулируемой величины.

Передаточная функция ПИ - регулятора

При скачкообразном изменении регулируемой величины на значение
х = х0 = ε0 идеальный ПИ - регулятор мгновенно перемещает регулирующий орган на величину Крε0, пропорционально отклонению
х0 регулируемой величины, после чего исполнительный механизм
регулятора дополнительно перемещается в ту же сторону со скоростью 
пропорциональной отклонению регулируемой величины.
Следовательно, в ПИ - регуляторе при отклонении регулируемой величины от заданного значения мгновенно срабатывает пропорциональная (статическая) часть регулятора, а затем воздействие на объект постепенно увеличивается под действием интегральной (астатической) части регулятора. Параметры настройки являются Кр - коэффициент усиления и постоянная времени интегрирования - Ти
Пропорционально- дифференциальный регулятор (ПД - регулятор) Оказывают воздействие на объект регулирования пропорционально отклонению регулирующей величины и её скорости
Тд - постоянная времени дифференцирования, она определяет величину
составляющей регулирующего воздействия по скорости Передаточная функция регулятора
Wnd=KP + T д P
При поступлении на вход идеального ПД - регулятора сигнала ε0 на
выходе мгновенно появляется бесконечно большой сигнал от действия дифференцирующей составляющей закона ПД - регулирования и сигнал от пропорциональной составляющей = Крε0.
Сигнал от дифференциальной составляющей сразу падает до нуля, а от пропорциональной составляющей остаётся постоянным и равным первоначальному.
Пропорционально - интегрально - дифференциальный регулятор (ПИД - регулятор)
Эти регуляторы воздействуют на объект регулирования пропорционально отклонению s регулируемой величины, интегралу от этого отклонения и скорости изменения регулируемой величины

Передаточная функция

 При скачкообразном изменении регулируемой величины идеальный ПИД - регулятор В начальный момент времени оказывает мгновенное бесконечно большое воздействие на орган регулирования, затем величина воздействия мгновенно падает до значения определяемого П – частью регулятор, после чего как и в ПИ - регуляторе сказывается влияние астатической частью регулятора Параметры настройкиКр, Ти, Т д
При скачкообразном изменении регулируемой величины идеальный ПИД - регулятор В начальный момент времени оказывает мгновенное бесконечно большое воздействие на орган регулирования, затем величина воздействия мгновенно падает до значения определяемого П – частью регулятор, после чего как и в ПИ - регуляторе сказывается влияние астатической частью регулятора Параметры настройкиКр, Ти, Т д
Общие сведения об исполнительных устройствах.
Исполнительное устройство - это одно из звеньев САР, предназначенное для непосредственного воздействия на объект регулирования
Оно Состоит из РО и ИМ
ИМ является приводной частью РО и должен обеспечить перемещение РО с возможно меньшим искажением законов регулирования, формируемых регулятором.
РО - звено исполнительного устройства, предназначенное для
изменения расхода вещества или энергии в объекте регулирования.
Различают дозирующие и дроссельные РО
Дозирующие - изменяют расход вещества за счёт изменения
производительности агрегатов (дозаторы, насосы, компрессоры ит.д.)
Дроссельные - представляют собой сопротивление изменяющее расход
вещества за счёт изменения своего проходного сечения(регулирующие
клапана, поворотные заслонки, краны)
РО характеризуется многими параметрами - пропускная и условная
пропускная способность, условное и рабочее давление, перепад давления на
РО и условный проход.
Устойчивость линейных систем автоматического управления § 1. Понятие устойчивости систем управления
Понятие устойчивости системы регулирования связано со способностью возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния. Наглядно устойчивость равновесия иллюстрируется на рис.1, где изображен шар, лежащий в некотором углублении (рис1,а), на некоторой выпуклой поверхности (рис. 1,б), на плоскости (рис. 1,в).
| Рис. 1. Состояния равновесия системы. |
Положение равновесия шара характеризуется точкой А0. В случае, изображенном на рис 1,а, при всяком отклонении его от положения равновесия, например в точку А2, шар будет стремиться снова возвратиться к положению равновесия - в точку А» (при отсутствии сил трения) или к некоторой конечной области, окружающей предшествующее положение равновесия, например в точку А, (при наличии сил трения). Такое положение равновесия будет устойчивым. Случай, изображенный на рис. 1,6, соответствует неустойчивому положению равновесия. Рис. 1, соответствует случаю безразличного положения равновесия.
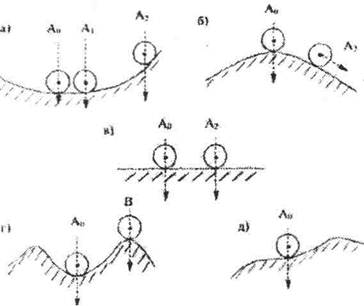
На рис. 1,г состояние равновесия устойчиво лишь до тех пор, пока отклонение не вышло за некоторую границу, определяемую, например, точкой В. Выйдя за эту границу, шар уже не вернется в точку А0 а будет двигаться вправо от точки В, либо все время удаляясь, либо до нового состояния равновесия в зависимости от формы поверхности, т.е. в конечном счете в зависимости от уравнений движения шара.
В общем случае, рассматривая нелинейные системы, вводят понятие устойчивости «в малом», «в большом», «в целом». Система устойчива «в малом», если констатируют лишь факт наличия области устойчивости, но не определяют каким - либо образом ее границы. Систему называют устойчивой «в большом», когда определены границы области устойчивости, т.е. определены границы области начальных отклонений, при которых система возвращается в исходное состояние. В том случае, когда система возвращается в исходное состояние при любых начальных отклонениях, систему называют устойчивой «в целом». Устойчивость «в целом» для определенного класса нелинейностей называют «абсолютной устойчивостью».
Случай, изображенный на рис.1,а, соответствует устойчивости «в целом», а случай, изображенный на рис. 1,г, может соответствовать либо устойчивости «в большом», либо устойчивости «в малом». Система устойчивая «в целом», будет устойчива «в большом» и «в малом» система, устойчивая «в большом», будет устойчива и «в малом».
На рис.1,д, изображено еще одно возможное для нелинейных систем состояние равновесия, которое называют «полуустойчивым».
Можно ввести понятия о невозмущенном состоянии равновесия, соответствующем точке Ао на рис.1,а, и возмущенном состоянии равновесия (точка А2). После прекращения действия внешних сил шар возвратится в точку А0 или A1 Условие устойчивости можно сформулировать так: система называется устойчивой, если из возмущенного состояния равновесия она перейдет в некоторую конечную (заданную) область, окружающую невозмущенное состояние равновесия.
Понятие устойчивости можно распространить и на случай движения некоторой системы. Пусть ее состояние определяется независимыми координатами
y1(t), y2(t)..., yn(t). Заданное движение системы определяется некоторым законом изменения координат:
Аналогично случаю положения равновесия заданное движение можно назвать невозмущенным движением. Приложение внешних сил к рассматриваемой системе вызовет отклонение действительного движения от заданного: y1(t)≠y1*(t), у1(t)≠у1*(t), y2(t)≠y2*(t),…,yn(t)≠yn*(t). Это движение будет возмущенным.
Заданное невозмущенное движение будет устойчивым, если в результате приложения внешних сил (возмущений), которые затем снимаются, возмущенное движение по истечении некоторого времени войдет в заданную область:

где εi =const - заданные величины, i=l,2,..., n.
Устойчивость есть категория, относящаяся, прежде всего к собственным движениям системы, порождаемым начальными условиями (возмущениями) и внутренними свойствами системы, но не внешними воздействиями.
Алгебраические критерии устойчивости позволяют судить об устойчивости системы по коэффициентам характеристического уравнения:
D(s) =a0 S2+a1S2+...+an=0. (1)
Заметим, что необходимым условием устойчивости системы любого порядка является положительность всех коэффициентов характеристического уравнения
(1):
a0>0;а1>0,...,аn >0 (2)
В соответствии с теоремой Безу уравнение (1) можно представить в виде произведения множителей, содержащих корпи s1,s2,...,sn;
a0(s-s1)(s-s2)...(s-sn)=0
Бели все корни характеристического уравнения будут отрицательны, то коэффициенты уравнения (1) будут положительны.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 761; Нарушение авторских прав?; Мы поможем в написании вашей работы!