КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Назначение радиусов кривых в плане
|
|
|
|
ЛЕКЦИЯ № 5 ОСОБЕННОСТИ ДВИЖЕНИЯ АВТОМОБИЛЯ ПО КРИВОЙ
При проектировании закруглений в плане, необходимо обеспечить удобство и безопасность движения автомобилей с расчетными скоростями. Удобство - обеспечивается плавностью движения автомобилей. Безопасность движения - достаточной видимостью на кривой и исключением возможности заноса и опрокидывания автомобиля.
На автомобиль, движущийся по кривой действуют две силы, приложенные к его центру тяжести:
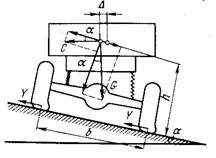
Рисунок 5.1 Силы, действующие на автомобиль при движении по кривой в плане
1) центробежная сила, направленная перпендикулярно направлению движения (горизонтально) во внешнюю сторону закругления
С=mV2/R (5.1)
где m – масса автомобиля;
V – скорость автомобиля, м/с;
R – радиус кривой в плане, м.
Центробежная сила стремится опрокинуть или сдвинуть автомобиль с дороги, вызывает деформацию шин в поперечном направлении, увеличивает их износ, повышает расход топлива.
Ночью условия движения автомобиля осложняются в связи с тем, что свет фар, направленный вдоль продольной оси, освещает дорогу перед автомобилем на гораздо меньшее расстояние, чем на прямых участках пути.
Все эти отрицательные факторы проявляются тем сильнее, чем меньше радиус закругления в плане. Поэтому удобство, безопасность и экономичность проезда по кривым в плане с высокой скоростью возможно только при назначении достаточно высокого радиуса закругления в плане;
2) вес автомобиля
G=mg (5.2)
де m – масса автомобиля;
g – ускорение свободного падения.
Поскольку проезжей части дороги придается поперечный уклон, предназначенный для поверхностного водоотвода, проектируя обе силы по направлению поперечного уклона, получаем, что
- составляющая центробежной силы будет равна - (mV2/R)·cosα;
- составляющая веса автомобиля – mgi;
Суммарная их сила (некая результативная) составит:
Y= (mV2/R)·cosα± mgi (5.3)
В зависимости от направления поперечного уклона составляющая веса автомобиля может иметь знак + или -.
Суммарная силаYназывается поперечной силой.
Поскольку угол α мал (cosα=1), его влиянием можно пренебречь. Тогда:
Y= (mV2/R) ± mgi (5.4)
Отсюда:
 , м (5.5)
, м (5.5)
Это уравнение показывает, что величина радиуса закругления зависит не от абсолютного значения поперечной силы, а от его отношения к весу автомобиля, которое называется коэффициентом поперечной силы:
 (5.6)
(5.6)
m - коэффициент поперечной силы.
Подставив это отношение в предыдущее выражение, получим:
 (5.7)
(5.7)
Знак (+) принят при устройстве односкатного поперечного профиля дороги.
Знак (–) принят при устройстве двухскатного поперечного профиля.
Коэффициент поперечной силы m может быть при расчетах нормирован, исходя из следующих требований: устойчивости автомобиля против опрокидывания, устойчивости автомобиля против заноса, самочувствия пассажиров при проезде по кривым, допускаемого превышение расхода топлива и износа шин на кривых, по сравнению с прямыми участками и т.п.
При назначении радиуса кривых в плане учитываются удобство управления автомобилем и обеспечение видимости ночью при свете фар.
1. Для устойчивости автомобиля против опрокидывания необходимо, чтобы момент удерживающих сил был больше момента сдвигающих сил:
∑Муд ≥ ∑Мсдв. (5.8)
Для обеспечения этого условия, необходимо, чтобы коэффициент поперечной силы:
 (5.9)
(5.9)
где: в - ширина колеи автомобиля, м;
h - высота его центра тяжести, м.
D - величина смещения центра тяжести автомобиля из-за деформации рессор и боковой эластичности шин в направлении действия центробежной силы.
На основе опытов боковое смещение D можно принять равным 0,2 м
Отношение в/h для легковых автомобилей колеблется от 1,8-2,5 м, грузовых от 2-3, автобусов от 1,7-2,2.
Принимая для расчетов минимальное значение в=1,7h, получаем, что для устойчивости автомобиля против опрокидывания коэффициент поперечной силы m не должен превышать 0,6.
Для устойчивости автомобиля против заноса необходимо, чтобы соблюдалось условие:
 (5.10)
(5.10)
Рк - тяговое или тормозное усилие, приложенное к колесу;
Gk - нагрузка от колеса автомобиля на покрытие;
jрасч -коэффициент сцепления шин автомобиля с дорожным покрытием.

Рисунок 5.2 Составляющие силы сцепления в плоскости
контакта колеса с покрытием.
Устройство на дорогах кривых малого радиуса ухудшает безопасность движения.
При разработке технических условий на проектирование дорог, допустимые значения коэффициента поперечной силы μ равны: (0,7-0,8) φрасч.
Под действием поперечной силы пассажиры ощущают наклон. Неудобство движения становится тем заметнее, чем больше поперечная сила.
Наблюдения показали, что при  =0,1 пассажир, не глядя на дорогу не замечает, что едет по кривой,
=0,1 пассажир, не глядя на дорогу не замечает, что едет по кривой,
- при = 0,15 – движение по кривой ощущается слабо,
- при = 0,2 – движение ощущается ясно, пассажиры испытывают легкое неудобство,
- при = 0,3 – при въезде на кривую, пассажир ощущают толчок, наклоняющий его вбок.
В зависимости от коэффициента поперечной силы и скорости движения автомобиля были приняты следующие нормативные значения радиуса горизонтальных кривых.
Таблица 5.1
| Расчетная скорость движения автомобиля, км/ч | |||||||||
| Минимальный радиус закругления в плане, м | в равнинной местности | ||||||||
| в горной местности |
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 4278; Нарушение авторских прав?; Мы поможем в написании вашей работы!