КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Силовые характеристики радиального НА
|
|
|
|
Конструкции направляющих аппаратов современных вертикальных гидротурбин нормализованы. В основу нормализации положена унифицированная силовая схема (рис. 10.3), при которой для управления лопатками требуются минимальные размеры сервомоторов направляющего аппарата. Выбор размеров механизма поворота проводят в соответствии с нормалями в зависимости от диаметра турбины (табл. 10.1). Работоспособность и надежность принятой конструкции должна быть обоснована расчетами и специальными исследованиями.
Чтобы установить основные размеры сервомоторов, необходимо располагать силовыми характеристиками направляющего аппарата, которые определяют при помощи специальных исследований моделей гидротурбин. Данные таких испытаний используют также для расчета на прочность лопатки 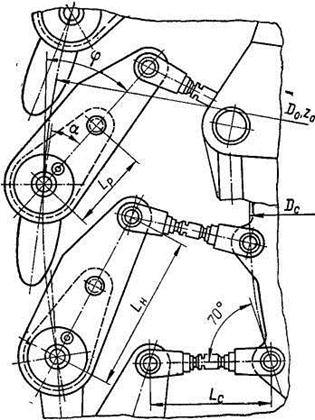 и механизма поворота направляющего аппарата.
и механизма поворота направляющего аппарата.
Рисунок 10.3. Нормализованный механизм поворота лопаток направляющего аппарата.
Таблица 10.1. Основные размеры механизма поворота нормализованного направляющего аппарата в зависимости от диаметров гидротурбин.
При повороте лопаток сервомоторы должны создать тяговый момент достаточный для преодоления гидравлического момента, действующего на все лопатки, и моментов трения в цапфах лопаток, в шарнирах серег и в опорах регулирующего кольца. Кроме того, сервомоторы должны обеспечить дополнительный натяг всех звеньев привода направляющих лопаток, в том числе достаточное уплотнение в местах соприкосновения двух соседних лопаток в их закрытом положении.,
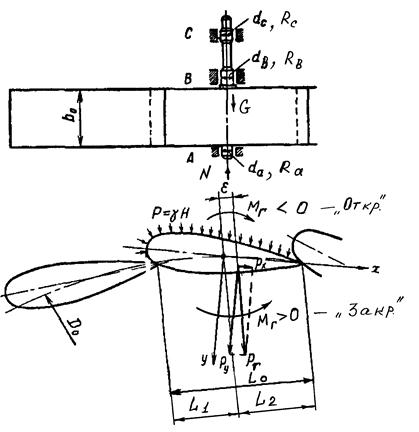
Рисунок 10.4. К определению сил и гидравлического момента, действующих на лопатку направляющего аппарата.
На лопатки направляющего аппарата действуют (рис. 10.4):
· давление воды Р = ρgН;
· усилие со стороны серьги через рычаг МР = РР∙lР;
· реакции и моменты трения в подшипниках.
Давление воды Р создает – гидравлическое поперечное усилие РГ, гидравлическое осевое усилие N и гидравлический момент относительно оси лопатки МГ.
Гидравлическое усилие N, направленное вдоль оси лопатки, при малых и средних напорах мало влияет на результаты расчета направляющих аппаратов, однако при высоких напорах, превышающих Н = 100 м, влияние N становится существенным.
Усилие РГ и момент МГ называют силовыми характеристиками направляющих лопаток. Величина их зависит от конструкции спиральной камеры, от формы профиля лопатки, положения оси поворота лопатки и от открытия направляющего аппарата а0. При закрытом направляющем аппарате силовые характеристики легко определяются с помощью простых расчетов. При открытом направляющем аппарате для определения силовых характеристик пользуются данными экспериментальных исследований.
За положительный гидравлический момент МГ принимается момент, действующий на «закрытие» направляющего аппарата, за отрицательный — на «открытие».
Закрытое положение направляющего аппарата.
В закрытом положении на лопатку НА действует давление Р = ρgН, приложенное со стороны спиральной камеры. При этом силовые характеристики вычисляются по формулам:
 (н)
(н)  (н/м)
(н/м)
В формулах используются следующие величины:
Н – средний напор, действующий на лопатку;
b0 – высота направляющего аппарата;
L0 = L1 + L2 = π∙D0 / z0 – расстояние между точками соприкосновения двух смежных лопаток;
n0  – относительный эксцентриситет лопатки НА;
– относительный эксцентриситет лопатки НА;
(ε – абсолютный эксцентриситет закрытия лопатки, плечо силы РГ)
ξ – коэффициент допустимого повышения давления в спиральной камере, при резком закрытии направляющего аппарата. В зависимости от напора:
ξ = (0,5 ÷ 0,7) (0,3 ÷ 0,5) (0,15 ÷ 0,2)
Н = < 40 м 40 ÷ 100 м > 100 м
Открытое положение направляющего аппарата.
При открытом направляющем аппарате, обтекаемым потоком, силы действующие на лопатку, пропорциональны квадрату скорости потока и квадрату линейных размеров. Заменив скорость пропорциональной ей величиной расхода Q и введя коэффициент пропорциональности СР и СМ тогда силовые характеристики в этом случае можно определить по формулам:
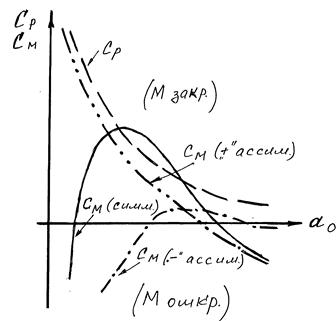 Безразмерные коэффициенты СР и СМ зависят от формы лопаток направляющего аппарата, спирали и открытия а0 (рис.
Безразмерные коэффициенты СР и СМ зависят от формы лопаток направляющего аппарата, спирали и открытия а0 (рис.
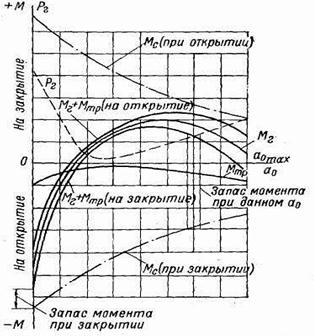 Рисунок 10.5. Кривые изменения коэффициентов СР и СМ гидравлических сил и моментов действующих на направляющие лопатки разных профилей при разных открытиях НА.
Рисунок 10.5. Кривые изменения коэффициентов СР и СМ гидравлических сил и моментов действующих на направляющие лопатки разных профилей при разных открытиях НА.
Рисунок 10.6. Кривые изменения гидравлических сил и моментов действующих на лопатки при разных открытиях НА.
На рисунке 10.6 показана кривая изменения гидравлического момента, действующего на лопатку НА. При закрытом положении направляющего аппарата, когда а0 = 0, величина гидравлического момента имеет максимальное значение. После открытия НА и начала обтекания лопатки потоком, гидравлический момент уменьшается до 0, а затем он меняет свой знак, действует в другую сторону, вначале возрастая, и в дальнейшем с увеличением открытия он снова приближается к нулевому значению. Характер кривой гидравлического момента одинаков для различных профилей направляющих лопаток, меняются только величины самого момента.
На лопатку действует момент трения в опорахМТР, который всегда направлен в сторону, противоположную направлению вращения лопатки и определяется по формуле:

где: da, db, dc - диаметр цапф лопаток в подшипниках a, b, c.;
Ra, Rb, Ra – реакции опор в соответствующих подшипниках;
μa, μb, μc – приведенные коэффициенты трения в соответствующих подшипниках, зависящие от материалов трущихся пар и от условий контакта на опорах, а также от вида смазки;
МУ – момент трения в упорном подшипнике лопатки, воспринимающем продольную гидравлическую силу N. Здесь МУ =0,5∙dУ∙μ∙(G-N).
Особое внимание на величину силы N следует обращать в высоконапорных гидротурбинах, т.к. Н – велик, а вес лопатки G – мал.
Реакции в опорах А, B, C зависят от величины зазора в верхней опоре, поскольку лопатка представляет собой 3-ех опорную балку.
Рассмотрим направляющий аппарат с симметричным профилем, установленный в СК с большим углом охвата.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 1468; Нарушение авторских прав?; Мы поможем в написании вашей работы!