КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Программы имитационного моделирования
|
|
|
|
Эффективность контроля с фильтрацией ложных отказов
Выполним статистический сравнительный анализ эффективности алгоритма с n- кратным повторным контролем параметров, обеспечиващим перепроверку решений “ не норма ” / “ норма ”, по сравнению с алгоритмом однократных измерений. Имитационная программа однократных измерений приведена на листингах 5.1 и 5.2.
Листинг 1. Исходные данные и программы моделирования
ситуаций LO и NO при допусковом контроле


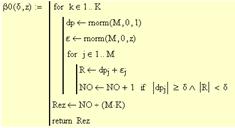
Листинг 2. Программы моделирования неверных решений
при однократном допусковом контроле
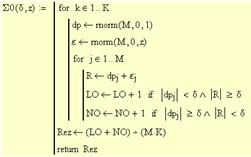
Программы моделирования однократных измерения записаны в виде функций вероятности ложного отказа a0(d, z), вероятности необнаруженного отказа b0(d, z) и вероятности суммарной ошибки S0(d, z), т.е. вероятности принятия неверных решений от нормированных координат d и z, а “0” (нуль) символизирует отсутствие повторных измерений.
Для заданных исходных данных результат моделирования приведен на рис. 5.4.

Запись исходных данных в виде:

позволяет получить зависимость функций ошибок от z по тем же программам (рнс. 5.5).
Уменьшение погрешности измерения z ® 0.01® 0.001® 0.0001 обеспечивает соответствующее снижение вероятности принятия неверных решений S0(z, d = 1.5) ® 2×10 –3 ® 2×10 –4 ® 2×10 –5 .
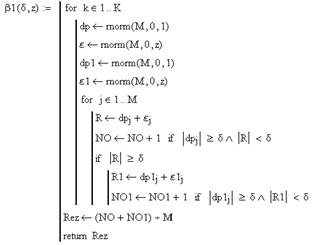
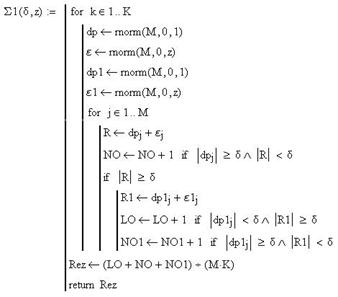
Имитация процесса допускового контроля с фильтрацией ситуации “ложный отказ” (LO) при n = 1 выполняется с помощью моделей, представленных компьютерными программами на листинге 5.3.
Листинг 5.3. Программа моделирования ошибок контроля при n = 1
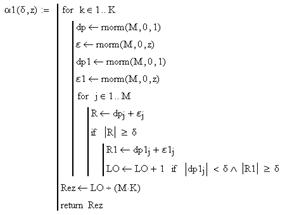
Листинг 5.3. Программы моделирования ошибок контроля при n = 1
(продолжение)
Результаты исследования поведения функций ошибок при контроле ДП алгоритмом с однократной (n = 1) альфа-фильтрацией приведены на рис. 5.6.
Статистическая зависимость качества алгоритма контроля с однократной альфа-фильтрацией Е a1(d, z = const), выраженная через отношение [a1(d) + b1(d)] / a1(d), приведена на рис. 5.7.
Оценка эффективности алгоритма контроля с однократной альфа-фильтрацией по отношению к алгоритму с однократным измерением параметра Е a1/0(d), выраженная отношением вероятностей ложных отказов a0(d, z = 0,01) / a1((d, z = 0,01), приведена на рис. 5.8.
Значения альфа-эффективности алгоритма с n -кратной фильтрацией ситуации “ложный отказ” по отношению к алгоритму с однократными измерениями обобщены на рис. 5.10.
Можно сформулировать следующие выводы о влиянии параметров диагностического процесса на эффективность исследуемого алгоритма.
1. Кратность фильтрации ложных отказов алгоритмом с повторным измерением параметра, признанного “не в норме”, имеет определяющее значение для уменьшения вероятности ложного отказа при выбранных значениях эксплуатационного допуска и погрешности измерения. В частности, при d = 1,5 и z = 0,0001 зависимость a(n) имеет вид, представленный в табл. 1.
Таблица 1
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 624; Нарушение авторских прав?; Мы поможем в написании вашей работы!