КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
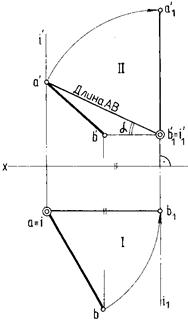
Тема 6. Рисунок 39 –Преобразование прямой общего положения в прямую уровня способом замены плоскостей проекций
|
|
|
|
А б
А б
А б
А б
Б в
Рисунок 39 – Преобразование прямой общего положения в прямую уровня способом замены плоскостей проекций
При замене плоскостей проекций расстояние от новой проекции точки до новой оси равно расстоянию от заменяемой проекции точки до старой оси проекций. Иными словами, высоты (аппликаты) концов отрезка в новой системе плоскостей проекций останутся прежними. В результате этой замены определены действительная величина отрезка прямой и угол наклона α к плоскости Н. При переходе к эпюру плоскость V1 совмещается с плоскостью Н.
Второе преобразование (рис. 39в). Для того чтобы прямая АВ оказалась проецирующей, т. е. изобразилась точкой, необходимо произвести вторую замену плоскости проекций и расположить новую плоскость Н1 перпендикулярно прямой. Новая ось х2 выбрана на эпюре перпендикулярной новой фронтальной проекции прямой а1'b'1. На новой плоскости проекций Н1, прямая изобразится точкой, так как координаты концов отрезка в системе Н1/V1 одинаковы.
Таким образом, прямая АВ в системе Н1/V1 стала проецирующей относительно плоскости Н1. Преобразования в этой задаче могли быть выполнены и в другой последовательности: сначала могла быть заменена горизонтальная плоскость проекций, а затем — фронтальная.
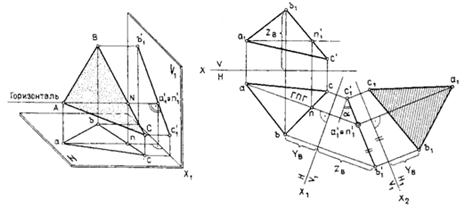
Рисунок 40 – Определение истиной величины плоской фигуры общего положения способом замены плоскостей проекций:
а – модель; б – эпюр
Рассмотрим еще одну задачу:требуется определить истинную величину плоской фигуры — треугольника АВС, занимающего в пространстве общее положение. Для решения этой задачи необходимо преобразовать эпюр так, чтобы плоскость общего положения стала параллельной одной из плоскостей проекций новой системы. В ортогонально-проекционной системе решить эту задачу одной заменой плоскости проекций нельзя. Как и в предыдущей задаче, необходимо выполнить два преобразования, но в иной последовательности: сначала следует преобразовать плоскость общего положения в проецирующую, а затем — в плоскость уровня.
На рис. 40а сначала заменена фронтальная плоскость проекций новой плоскостью V1, перпендикулярной плоскости треугольника. Это условие выполнено с помощью вспомогательной прямой — линии уровня, например, горизонтали AN ( рис. 40б). Новая ось х1 проведена на эпюре перпендикулярно горизонтальной проекции горизонтали. На новой плоскости проекций V1 горизонталь спроецировалась в точку, а плоскость треугольника — в линию.
Угол α определяет угол наклона треугольника к горизонтальной плоскости Н.
На втором этапе решения проведена вторая замена — новая плоскость проекций Н1 установлена параллельно треугольнику. Новая ось х2 проведена параллельно новой фронтальной проекции треугольника — прямой a'1b'1c'1. Построенная проекция определяет истинную величину и форму треугольника.
Если плоскость задана следами, а не плоской фигурой, ее следует преобразовать в проецирующую (рис. 41). Для этого новую плоскость проекций и новую ось проекций следует расположить перпендикулярно, например, к горизонтальному следу заданной плоскости, при этом горизонтальный след спроецируется на новой плоскости в точку (Рх1).
Для построения новой проекции фронтального следа Ру1 достаточно найти проекцию любой точки заданной плоскости, например произвольной точки N, лежащей на следе. Прямая Рх1 — n'1 является искомым проецирующим следом данной плоскости.
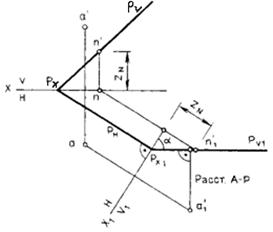
Рисунок 41 – Преобразование плоскости общего положения, заданной следами в проецирующую, способом замены плоскостей проекций
Способ вращения. Сущность способа вращения состоит в изменении положения объекта, заданного на эпюре, таким образом, чтобы определенные его элементы заняли относительно плоскостей проекции частное положение и проецировались без искажения.
Вращение может производиться вокруг осей, расположенных относительно плоскостей проекций различным образом. Ниже рассматриваются следующие разновидности способа вращения: вращение вокруг проецирующих осей, вращение вокруг линий уровня и совмещение.
 а б
а б
Рисунок 42 – Вращение вокруг проецирующих осей:
а -модель, б – эпюр
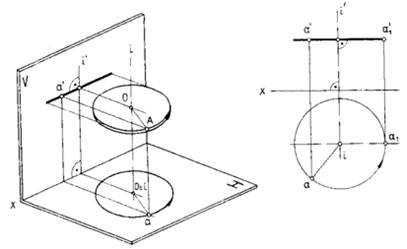
Вращение вокруг проецирующих осей. При вращении точки вокруг оси, перпендикулярной плоскости проекций, одна ее проекция перемещается по окружности, а вторая — по прямой, перпендикулярной проекции оси вращения (рис. 42а).
Окружность, описываемая точкой А, спроецируется на плоскости Н без искажения, а на плоскости V — в виде отрезка прямой. При вращении точки вокруг фронтально проецирующей оси ее траектория проецируется на фронтальную плоскость проекций окружностью, а на горизонтальную плоскость — отрезком прямой, перпендикулярным проекции оси.
В процессе решения задач способом вращения вокруг проецирующих осей этапы преобразований геометрических элементов аналогичны тем, которые выполнялись способом замены плоскостей проекций.
На рис. 44 прямая общего положения одним вращением вокруг горизонтально проецирующей оси i преобразована в линию уровня (фронталь), а затем вторым вращением вокруг оси i1, перпендикулярной фронтальной проекции, приведена в проецирующее положение — проецируется на плоскость Н в точку.
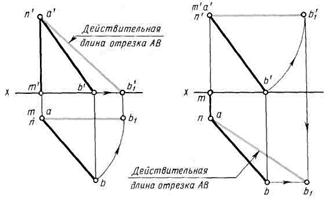
Рисунок 43 -Определение натуральных величин прямых общего положения способом вращения
 Преобразования, аналогичные тем, которые выполнялись способом замены плоскостей проекций, производятся и при определении вращением действительной величины плоской фигуры.
Преобразования, аналогичные тем, которые выполнялись способом замены плоскостей проекций, производятся и при определении вращением действительной величины плоской фигуры.
Двойное вращение вокруг проецирующих осей приводит обычно к тому, что последующие построения и новая проекция объекта накладываются на заданную проекцию, что затрудняет чтение эпюра. Поэтому способ вращения вокруг проецирующих осей целесообразно применять при решении задач одним вращением.
 Вращение вокруг линий уровня. Этот способ применяется для преобразования плоскости общего положения плоскость уровня и для определения действительной величины плоской фигуры. Задача решается одним вращением вокруг линии уровня данной плоскости – горизонтали или фронтали.
Вращение вокруг линий уровня. Этот способ применяется для преобразования плоскости общего положения плоскость уровня и для определения действительной величины плоской фигуры. Задача решается одним вращением вокруг линии уровня данной плоскости – горизонтали или фронтали.
На рис. 45а показано вращение некоторой точки А вокруг горизонтальной прямой МN до тех пор, пока точка А не окажется в плоскости, параллельной плоскости проекций Н и определяемой этой точкой и осью вращения.
При вращении вокруг горизонтальной прямой МN точка А перемещается по дуге радиуса ОА, лежащей в плоскости Q, перпендикулярной к оси вращения. когда точка А займет нужное положение А1, горизонтальная проекция радиуса вращения (оа1) будет равна его истинной величине, которая может быть определена способом прямоугольного треугольника. На рис. 45б эти же построения выполнены на эпюре.

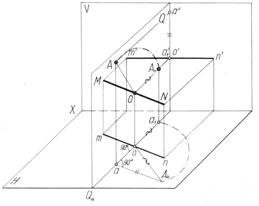
Рисунок 45 – Вращение точки вокруг горизонтальной прямой:
а -модель, б – эпюр
На рис. 46 в плоскости, заданной треугольником АВС, проведена горизонталь через вершину А и точку D на продолжении противоположной стороны треугольника. Горизонталь принята за ось вращения. Точки А и D при вращении останутся неподвижными. Вершины В и С вращаются по окружностям, которые проецируются на горизонтальной проекции отрезками прямых, перпендикулярными проекции оси. Так как треугольник должен занять горизонтальное положение, радиус вращения вершины В, например, должен проецироваться в натуральную величину. Длину радиуса RB можно определить способом прямоугольного треугольника. Определив горизонтальное положение радиуса вращения вершины В, построим вершину С1 в пересечении прямой b1d с проекцией ее траектории вращения. Полученная проекция ab1c1 и определяет истинную величину треугольника.
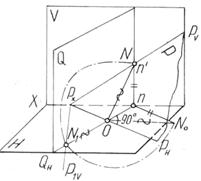
Совмещение — частный случай вращения вокруг горизонтали или фронтали, когда осью вращения является горизонтальный или фронтальный след плоскости. При вращении плоскости вокруг ее горизонтального или фронтального следа до совмещения с соответствующей плоскостью проекций лежащая в этой плоскости фигура спроецируется на плоскость проекций в натуральную величину.
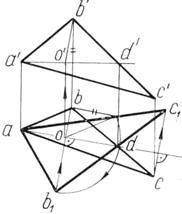
Рисунок 46 – Вращение треугольника вокруг горизонтальной прямой
Чтобы найти истинную величину плоской фигуры способом совмещения, надо совместить с одной из плоскостей проекций ряд характерных точек ее периметра.
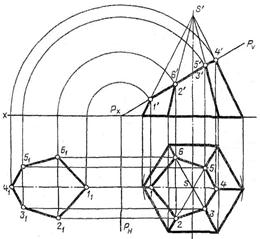
Рисунок 47 – Определение натуральной величины сечения способом совмещения
На рис. 48а показано совмещение некоторой плоскости Р с плоскостью проекций Н. Так как горизонтальный след плоскости Р (РН) – ось вращения, то его положение и положение точки РХ не меняется. Для нахождения РV в совмещенном положении (Р1V) на нем взята произвольная точка N и найдено новое положение ее, совмещенное с плоскостью проекций Н (N1). Точка N при вращении вокруг РН перемещается в плоскости Q, перпендикулярной к РН, по дуге радиуса ОN, и совмещенное положение ее (N1) определяется пересечение этой дуги с QН. Фронтальный след плоскости в совмещенном положении (Р1V) проведен через точки РХ и N1. При этом отрезок ОN1 является истинной величиной радиуса вращения.
 На рис. 48б эти построения выполнены на эпюре. Истинная величина радиуса вращения найдена способом прямоугольного треугольника. Однако практически определять истинную величину радиуса вращения точки N нет необходимости, так как отрезок РХn/ равен отрезку РХN1. Поэтому для нахождения точки N1 достаточно провести дугу радиуса РХn/ до пересечения с РН.
На рис. 48б эти построения выполнены на эпюре. Истинная величина радиуса вращения найдена способом прямоугольного треугольника. Однако практически определять истинную величину радиуса вращения точки N нет необходимости, так как отрезок РХn/ равен отрезку РХN1. Поэтому для нахождения точки N1 достаточно провести дугу радиуса РХn/ до пересечения с РН.
Рисунок 48 – Совмещение плоскости Р с плоскостью проекций Н:
а -модель, б – эпюр
На рис. 49а выполнено совмещение заданной плоскости Р и лежащей в ней некоторой точки А с плоскостью проекций Н. Для этого вначале найдено совмещенное с плоскостью Н положение горизонтали АN (а1n1), на которой находится точка А, и на ней отмечена точка а1.
На рис. 49б плоскость Q и лежащая в ней точка В совмещены с плоскостью проекций V.
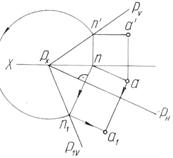
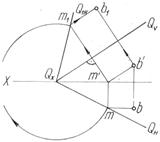
Рисунок 49 – Совмещение плоскости с плоскостью проекций:
а - Н, б – V
Способ плоскопараллельного перемещения. Плоскопараллельное перемещение можно рассматривать как вращение вокруг невыявленных проецирующих прямых. При плоскопараллельном перемещении геометрического образа одна из его проекций (оставаясь равной самой себе) перемещается в плоскости проекций, другие проекции точек геометрического образа перемещаются по прямым, параллельным направлению оси проекций (рис. 50).

Рисунок 50 – Определение натуральной величины прямой
способом плоскопараллельного перемещения
На рис. 51 плоскость треугольника общего положения двумя последовательно проведенными перемещениями приведена в положение, параллельное плоскости Н. Первое перемещение (Ι) выполнено с помощью вспомогательной линии уровня — горизонтали. Треугольник приведен во фронтально-проецирующее положение. Вторым перемещением (II) плоскость приведена в горизонтальное положение. Новую проекцию располагают на свободном поле эпюра. Перемещение проводится параллельно плоскостям проекций, поэтому изображения вершин треугольника на второй проекции перемещаются по прямым, перпендикулярным линиям связи.
Рисунок 51 – Определение натуральной величины треугольника
способом плоскопараллельного перемещения
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 2941; Нарушение авторских прав?; Мы поможем в написании вашей работы!