КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Решение задачи
|
|
|
|
1. Системный анализ решаемой задачи и этап формализации постановки решаемой задачи. При традиционном подходе к задаче оценивания принимают соответствующие гипотезы о приближенных нормальности, независимости, однородности шумов, сопровождающих процесс измерения, и т.д.. Это позволяет при выборе алгоритма обработки информации использовать метод максимального правдоподобия [1], обеспечивающий минимизацию риска оценки результатов измерения.
Так для выборки Y = (Y 1,..., Yn), каждый элемент Yi которой имеет плотность распределения f (yi; x), x Î W x, плотность распределения выборки Y определяется выражением
f (y; x)= (yi; x), y = (y 1,..., yn)Î Rn, x ÎW x,
(yi; x), y = (y 1,..., yn)Î Rn, x ÎW x,
а функция правдоподобия данного вектора Y имеет вид
Â(Y; x) = f (Y; x) =(yi; x), x ÎW x.
При регулярном семействе F = { f (y; x), x Î W x } для нахождения оценки максимального правдоподобия  (Y) пользуются стандартными приемами дифференциального исчисления, решая уравнение правдоподобия
(Y) пользуются стандартными приемами дифференциального исчисления, решая уравнение правдоподобия
 Â(Y; x) = 0.
Â(Y; x) = 0.
При этом всякий математический результат, предназначенный для непосредственного практического использования, должен обладать свойством устойчивости по отношению к небольшим отклонениям от исходных предположений. Однако в ряде случаев даже небольшие вариации исходных предпосылок о вероятностной структуре контролируемой информации могут привести к существенному ухудшению свойств используемых процедур. Поэтому необходимо постоянно оценивать условия измерения и осуществлять адаптацию к ним.
При измерении влияние одной из компонент может настолько перевесить суммарный вклад других компонент в ln Â(Y; x), что ее значение будет полностью определять величину оценки. Сам по себе этот эффект не вызывает беспокойства, если модель для плотности вероятности верна, однако он может возникать и при случайном ошибочном измерении, который не описывается принятой плотностью распределения вероятности f, то есть в общем случае f задает только приближенную исходную модель. Характеристики номинально оптимальных процедур обработки сигналов во многих случаях могут резко ухудшаться, даже при сравнительно малых отклонениях от исходных данных. В этом состоит основная причина, по которой приходится строить алгоритмы обработки сигналов, которые характеризуются свойством робастности [7, 64], то есть алгоритмы, обладающие высокой эффективностью в условиях, когда свойства сигналов и шума могут меняться в пределах заданных классов возможных характеристик.
Наличие априорной неопределенности относительно статистических характеристик информации измерения приводит к необходимости построения методов обработки, обладающих пониженной чувствительностью к всевозможной неадекватности между априорно принятой вероятностной моделью и свойствами реальной среды, то есть робастностью.
Важнейший подход к проблеме синтеза робастных методов обработки, обеспечивающих достаточно точное решение подобных задач в условиях неопределенности, дает принцип минимакса. Минимаксный подход требует заранее ориентироваться на ситуацию, наименее благоприятную для задачи оценивания, т.е. обеспечивает получение некоторого гарантированного решения. Сущность подхода состоит в том, что, сохраняя высокую устойчивость найденных решений, он позволяет избежать значительного снижения точности оценивания в случае, когда условия оценивания близки к предполагаемым. Один из наиболее эффективных путей построения минимаксных алгоритмов дает метод максимального правдоподобия (или метод М-оценивания), впервые предложенный П. Хьюбером в 1964г [7].
Для того, чтобы как - то уменьшить нежелательную чувствительность критерия, основанного на L(Y), вместо функции Â(Y; x), соответствующей исходной модели, используют ее ограниченную модификацию  (Y; x) вида
(Y; x) вида
 (Y; x) =
(Y; x) = 
где a и b – постоянные.
При справедливости заданной модели и не слишком малых значениях a и b, эффективность критерия будет падать на краях области изменения x. Ограниченность (Y; x) влечет за собой нечувствительность (робастность) к влиянию небольшого числа ложных наблюдений. Изменяя длину интервала [– a, b ], можно устанавливать компромисс между степенью робастности и снижением эффективности для принятой модели. Робастные методы оказываются полезными в тех случаях, когда при синтезе оптимальных процедур приходится учитывать возможность снижения их эффективности из - за отклонения характеристик входных данных от априорно предполагаемой модели. Робастные алгоритмы обработки сигналов обладают высокой эффективностью при номинальных условиях и приемлемой эффективностью в условиях, когда свойства сигналов и шума могут меняться в пределах заданных классов возможных характеристик.
Робастная процедура обработки сигнала для номинальной модели может уступать в эффективности процедуре, которая для этой модели оптимальна, но зато полная эффективность для данного класса моделей будет высокой или, по крайней мере, достаточной. При этом решение необходимо искать в виде процедуры, которая в наихудшем случае обладает оптимальной эффективностью, что приводит к минимаксным робастным алгоритмам.
Адаптивные алгоритмы сложнее минимаксных процедур фиксированной структуры, поэтому их целесообразно использовать в тех случаях, когда априорная неопределенность слишком велика (что не позволят обеспечить приемлемую эффективность минимаксных методов) или же имеются время или данные, необходимые для адаптации. Минимаксным АОЭИ отдают предпочтение в тех случаях, когда неопределенность классов имеет более ограниченный характер. Здесь их целесообразно использовать как робастные процедуры, предохраняющие от свойственного оптимальным методам чрезмерного падения эффективности при отклонении от исходных допущений. Минимаксные АОЭИ могут применяться и в рамках адаптивного подхода, поскольку механизм обучения в адаптивных процедурах никогда не предполагается настолько совершенным, чтобы за имеющееся ограниченное время произошла полная адаптация.
Для формализации робастного подхода при оценивании экспериментальных данных рассмотрим модель наблюдений
Y (t) = X (t) + N (t), – ¥ < t < ¥,
где X (t), N (t) – сигнал и шум (действительные, центрированные, ортогональные, стационарные в широком смысле случайные процессы). Пусть X (t) и N (t) имеют соответственно спектральные плотности мощности Ф X и Ф N. Задача оценивания экспериментальных данных (фильтрации, предсказания или сглаживания) сводится к получению оценки X (t) по заданному процессу наблюдений Y (t) в форме
 =
=  ,
,
где h – импульсная характеристика стационарного линейного фильтра. Качество полученной оценки сигнала характеризуется величиной квадратичного риска, который определяется выражением
E { =
=
= = e (Ф X, Ф N; H),
= e (Ф X, Ф N; H),
где H – передаточная функция, соответствующая h.
Робастный подход основан на минимизации по H величины падения эффективности фильтра, в наихудшем случае, по критерию:
 .
.
Фильтр, удовлетворяющий данному критерию, является робастным по отношению к классам неопределенности Á и À.
Для решения этой задачи ищется седловая точка минимаксной игры, т.е. спектральная пара (Ф X,L, Ф N,L) Î Á´À и фильтр HR, удовлетворяющие условию
 =
= =
= .
.
Согласно правому равенству, HR является оптимальным фильтром для (Ф S,L, Ф N,L), то есть
HR (w) = Ф X , L (w)/(Ф X , L (w) + Ф N , L (w)).
Таким образом, определение седловой точки включает в себя отыскание пары (Ф X,L, Ф N,L), удовлетворяющей данному выражению. Левое равенство показывает, что фильтр HR достигает наихудшей эффективности на спектральной паре (Ф X,L, Ф N,L), для которой он оптимален. Это наихудшее значение e (Ф X,L, Ф N,L, HR) определяет гарантированный уровень эффективности фильтра HR на классах Á и À. Так, если оба класса Á и À порождаются всеми спектрами, которые отличаются от исходного не более чем на заданную величину e, то робастный фильтр имеет вид
где H 0 = Ф S /(Ф S +Ф N) – исходный фильтр, а константы k 1 и k 2 определяются значением e и конкретным типом использованной модели.
Соответствующее минимальное значение квадратичного риска определяется по формуле
e (Ф X, Ф N; HW) =  = eW (Ф X, Ф N).
= eW (Ф X, Ф N).
Из полученного выражения следует, что для определения структуры алгоритма обработки информации необходимо знание спектра оцениваемого сигнала Ф X (w) и шума Ф N (w), сопровождающего его измерение. Однако при измерении эти составляющие сигнала получают в смеси и отделить их друг от друга затруднено.
2. Выбор алгоритма обработки экспериментальной информации. Одним из наиболее широко используемых в обработке сигналов алгоритмов является дискретный фильтр Калмана [53], основанный на линейной модели наблюдений:
Yn = HnXn + Vn, n = 0, 1,....,
где Yn – вектор наблюдения размером r для каждого n; Hn – матрица наблюдений; Xn – вектор состояния размером n; Vn – шум наблюдений.
Оптимальные по критерию минимума среднего квадратичного риска оценки Xn и Xn+ 1 по наблюдениям Y 0,..., Yn определяются рекуррентно, в соответствии с известным алгоритмом калмановской фильтрации:
n +1= Fn n + Wn,
где Fn – одношаговая переходная матрица состояний; Wn – шум состояния.
Из общей теории минимаксного подхода к задачам математической статистики известно, что конечно-выборочная дисперсия минимаксными свойствами не обладает, что определяет использование робастных алгоритмов.
Для завершения формулирования требований к синтезируемому АОЭИ учтем, что процесс вычислений необходимо организовать таким образом, чтобы результат можно было не получать каждый раз заново, а только корректировать с учетом очередного поступившего результата измерения. Поэтому целесообразно использовать алгоритмы, в которых вычислитель, перед проведением любого информационного вычисления, располагает информацией о результатах всех предшествующих вычислений, достаточной памятью для хранения этих результатов и достаточным временем для их обработки, т.е. для проведения соответствующего алгоритмического вычисления необходимо использовать не пассивные (неадаптивные), а последовательные (адаптивные) алгоритмы. В данной ситуации радикальным решением является создание процедур с конечной памятью (на скользящем окне). В связи с этим целесообразно использовать рекуррентный метод вычисления в рамках критерия наименьших квадратов на окне, совпадающем с интервалом усреднения результатов измерения и перемещающемся по оси времени в виде “скользящего окна”. Сформулированным требованиям соответствует алгоритм, определенный по эволюционной теореме [53], для вычисления выборочного среднего с конечной памятью на “скользящем окне”, причем в рассматриваемом алгоритме используются усредненные весовые коэффициенты, с учетом всех значений, входящих в рассматриваемое “окно”.
В данном алгоритме в процессе адаптации определяется “окно” усреднения, а поскольку спектр оцениваемого сигнала неизвестен, то используется рекуррентный метод вычисления. Критерием качества результата решения является минимизация среднего риска вычисления на окне, совпадающем с интервалом усреднения результатов измерения и перемещающемся по оси времени при поступлении очередного значения (“скользящее окно”).
Для уменьшения смещений оценки параметра диагностирования предложено, в рамках метода, использовать усредненные весовые коэффициенты с учетом всех значений, входящих в рассматриваемое окно. Алгоритм, основанный на данном методе, состоит из следующих операций:
1. Начальной оценки по критерию минимума эмпирического риска [1], представляющую собой выборочное среднее:
 .
.
2. Определения весового коэффициента предыдущего измерения:
 .
.
3. Определения весового коэффициента последующего измерения:
 .
.
4. Определения коэффициента передачи для нового измерения, на основании усреднения текущих и предыдущих весовых коэффициентов:
 .
.
5. Нахождения оценки нового измерения, получаемой согласно эволюционной теоремы [74]:
 .
.
6. Принимая во внимание, что погрешности  представляют собой некоррелированные случайные величины с нулевым средним и постоянной дисперсией
представляют собой некоррелированные случайные величины с нулевым средним и постоянной дисперсией  , определяется величина текущего окна, при которой величина эмпирического риска [1, 89, 78] равна
, определяется величина текущего окна, при которой величина эмпирического риска [1, 89, 78] равна
 .
.
Разработанный алгоритм реализован в виде программы для обработки осциллограмм, полученных при диагностировании зоны повреждения силовых КЛ (“ ORSK ”) [110]. Робастный АОЭИ для обработки осциллограммы диагностирования зоны повреждения силовой КЛ, синтезированный в разд. 6.5, реализован в программе " ORSK " V 2.0. Так, для кабеля СБ-3´25мм2 на напряжение 6кВ, длиной L кл=300м, зона поражения которого произошла на расстоянии L п=100м, получены результаты, представленные на рис. 3.4. При этом получены несмещенные оценки измеряемой величины, что достигается за счет введения в АОЭИ [110] усредненных весовых коэффициентов a и b, которые определяются через выборочное среднее, но на соответствующих интервалах “скользящего окна”.
Другим достоинством модифицированного АОЭИ является отсутствие ухода оценок по интервалам измерения, что приводит к более точному отсчету данных интервалов при ОМП. Необходимо отметить увеличение числа операций в модифицированном АОЭИ на скользящем окне, которое ограничивает его применение при оценке параметров измерения в реальном масштабе времени. Вторым ограничением, накладываемым самим АОЭИ, является необходимость использования нечетного количества замеров в рассматриваемых окнах усреднения, что требуется для исключения ухода получаемых оценок по оси времени. Несмотря на указанные недостатки, для обработки экспериментальных данных, полученных в процессе диагностирования зоны повреждения силовых КЛ, предпочтительно применение модифицированного АОЭИ.
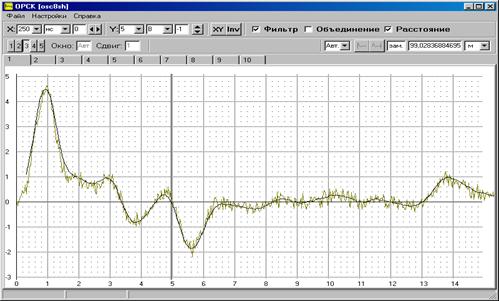
Рис. 3.4. Результаты обработки экспериментальных данных при определении расстояния до места повреждения силового кабеля модифицированным алгоритмом
Данная программа защищена свидетельством об официальной регистрации РОСПАТЕНТом [110].
Задача 3.2. Синтезировать алгоритм обработки экспериментальной информации, получаемой при исследовании акустических характеристик электротехнического оборудования.
Синтезированные в разд. 4.3, 4.4 АОЭИ, а также их робастный тип, полученный в разд. 6.5, можно использовать как при формировании высококачественной идентификационной модели (МИд) исследуемого объекта, так и при высококачественной оценке измеряемого параметра управляемого процесса, а для повышения качества экспериментальных данных на начальных этапах оценки целесообразно использовать алгоритмы, сформулированные выше.
Задача идентификации ЭСВМ включает постановку идентифицирующего эксперимента и решение задачи оценивания экспериментальных данных, полученных в эксперименте. При идентификации ЭСВМ эксперименты должны быть взаимосвязаны общей стратегией проведения. Для измерения параметров в автоматизированной системе научных исследований, контроля и испытаний при разработке и производстве элементов АСУ разработаны и внедрены алгоритмы обработки экспериментальной информации. Программная реализация данного алгоритма использована для автоматизации проектирования и наладки электроприводов корабельных вспомогательных механизмов в автоматизированной системе научных исследований на базе стенда. При этом контролировалась радиальная составляющая вибрационного ускорения ВИД в горизонтальной плоскости ax. Для этого в верхнем углу вертикальной части основания стенда, к которой непосредственно крепится двигатель, был установлен датчик вибрации. Были получены осциллограммы вибрационного ускорения для различных значений тока питания фазы А при прямом и согласованном положении ротора, которые после обработки синтезированным алгоритмом приведены на рис. 3.5. На рис. 3.5 приведены результаты обработки осциллограмм вибраций для различных значений тока питания фазы А до и после обработки предлагаемыми алгоритмами. При этом линия 1 получена для разных значений риска.
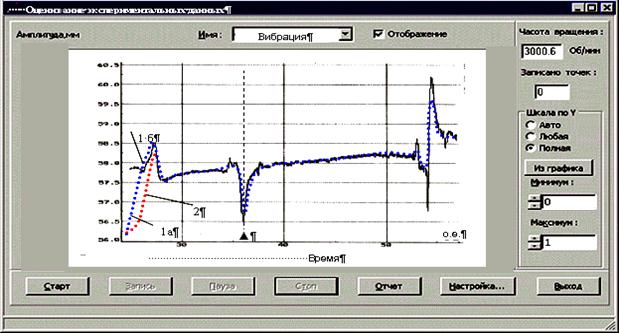
Рис. 3.5. Осциллограммы вибраций для различных значений тока питания фазы А до и после обработки предлагаемыми алгоритмами
На участке 1а риск АОЭИ выбран большим, чтобы быстро достигнуть значения оценки обрабатываемого процесса за счет снижения ее качества, а на участке 1б – равным риску кривой 2. В результате получаются оценки обрабатываемого процесса одинакового качества, но за разное время обработки, т.е. АОЭИ на участке 1 обладает большей эффективностью, что согласуется с выводом разд. 4.9. Синтезированные АОЭИ для исследования ЭСВМ обеспечили точность измерения параметра, не превышающую точность датчиков измерения –2–3%, что, следовательно, позволило более точно оценивать параметры МИд ЭСВМ.
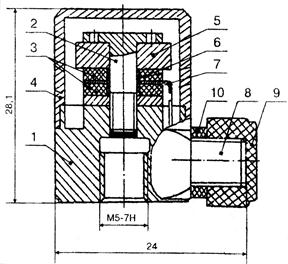 Рис. 3.6. Пьезоэлектрический преобразователь виброизмерительный ДН–3–М1: 1 – основание; 2 – пьезоэлемент ЭП4К-1-3; 3 – винт; 4 – крышка; 5 – масса инерционная; 6 – втулка; 7 - контакт; 8 – втулка; 9 – колпачок; 10 – кольцо.
Рис. 3.6. Пьезоэлектрический преобразователь виброизмерительный ДН–3–М1: 1 – основание; 2 – пьезоэлемент ЭП4К-1-3; 3 – винт; 4 – крышка; 5 – масса инерционная; 6 – втулка; 7 - контакт; 8 – втулка; 9 – колпачок; 10 – кольцо.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 383; Нарушение авторских прав?; Мы поможем в написании вашей работы!