КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Анализ задачи формирования модели измерения
|
|
|
|
При решении задачи редукции необходимо задавать начальную импульсную переходную функцию первичного преобразователя, которая корректируется и уточняется на этапе идентификации обобщенного алгоритма оценивания. В качестве примера решения данной задачи рассмотрим ее частный случай.
Задача 3.3. Определить начальную импульсную переходную функцию виброизмерительного пьезоэлектрического преобразователя.
Решение задачи. На рис. 3.6 изображено устройство виброизмерительного пьезоэлектрического преобразователя ДН–3–М1 (паспорт 5Ф2.781.102 ПС), который используется в испытательном стенде для оценивания параметров ВИП. При воздействии механических колебаний на основание вибропреобразователя с ускорением а на инерционную массу m действует сила Р. Пьезоэлементы вибропреобразователя испытывают деформации сжатия – растяжения, в результате чего на грани пьезоэлементов, перпендикулярной вертикальной оси, возникают электрические заряды q, пропорциональные действующей силы P, с коэффициентом пропорциональности, равному индексу пьезомодуля а 11. Сигнал с кварцевых пластин снимается экранированным кабелем и поступает на измеритель шума и вибраций ВШВ – 003 – М3 (паспорт ИМ 2.745.000 ПС).
Эквивалентная схема преобразователя, соединенного кабелем с измерительной цепью, представлена на рис. 3.7. Произведем оценку параметров элементов данной схемы замещения. Так, собственное сопротивление пьезоэлемента R 0 определяется удельным сопротивлением материала пластин и их поверхностным сопротивлением.
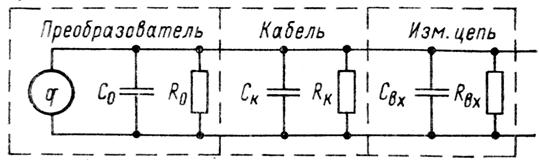
Рис. 3.7. Эквивалентная схема замещения пьезоэлектрического преобразователя: C0 – емкость между гранями пьезоэлектрика (емкость преобразователя); Ск – емкость кабеля между жилой и экраном; Свх – входная емкость измерительной цепи; R0 – сопротивление преобразователя; Rк – сопротивление изоляции кабеля; Rвх – входное сопротивление измерительной цепи
Первая составляющая для кварца (1015 – 1016 Ом) значительно больше второй, поэтому определяющим является поверхностное сопротивление, для повышения которого до R = 109 ¸ 1010 Ом преобразователь приходится герметизировать, защищая его поверхность от влажности и загрязнения. Электрическое сопротивление изоляции используемого вибропреобразователя ДН–3–М1 и кабеля R к при нормальных условиях применения не менее 10 ГОм (Под нормальными условиями применения принято: температура окружающего воздуха (20±5)°С, относительная влажность от 30 до 80%, атмосферное давление от 84 до 196 кПа (от 630 до 795 мм рт. ст.)).
Наиболее высокое входное сопротивление R вх (до 1013–1015 Ом) и входную емкость Свх (до 20 пФ) измерителя шума и вибраций обеспечивают МДП – транзисторы, однако они имеют высокий уровень шумов. Поэтому для этих целей используют полевые транзисторы с p – n – переходом типа КП303Г, входное сопротивление которого составляет не менее 1011Ом.
Используемый вибропреобразователь ДН–3–М1 имеет электрическую емкость при работе с кабелем длиной 2 м (C 0 + С к) 1535±325 пФ, а с кабелем 5 м 1800±370 пФ. Анализируемую схему замещения можно привести к схеме, в которой включены параллельно сопротивление R и емкость С, где сопротивление R равно сопротивлению параллельного соединения R 0, R к и R вх, а емкость С = С 0 + С к + С вх. Данная схема замещения позволяет определить передаточную функцию пьезоэлектрического преобразователя с подключенной к нему измерительной цепью. Так, изменение силы P (t) создает переменный ток:
i = а 11 dP (t)/ dt,
где а 11 – индекс пьезомодуля для грани, перпендикулярной оси Х (вертикальной). Выходное напряжение преобразователя с подключенной к нему измерительной цепью составляет
 вых =
вых = 
 ,
,
где = j w a 11 .
.
После простых преобразований получаем
вых = а 11 R  .
.
Из данного выражения можно получить передаточную функцию виброизмерительного пьезоэлектрического преобразователя в виде
W пэп(p) =  ,
,
которая соответствует передаточной функции неидеального дифференцирующего звена, переходная функция которого имеет вид [111]:
h пэп(t) =  ,
,
а импульсная переходная функция –
k пэп(t) = –
 .
.
Амплитудно-частотная характеристика преобразователя, включенного в измерительную цепь, имеет вид
H пэп(w) =  ,
,
а логарифмическая амплитудная характеристика –
20 lg H пэп(w) = 20 lg + 20 lg w RС – 20 lg
+ 20 lg w RС – 20 lg .
.
Данная логарифмическая амплитудная характеристика аппроксимируется при w< отрезком низкочастотной асимптоты вида
отрезком низкочастотной асимптоты вида
20 lg + 20 lg w RC,
имеющей наклон 20 дб/дек, а при w>– отрезком высокочастотной асимптоты – горизонтальной прямой 20 lg, пересекающейся с низкочастотной асимптотой при значении w0 = . При этом фазо – частотную характеристику в области высоких частот можно представить в виде
j = arctg  =
=  – w RC.
– w RC.
Полученные характеристики позволяют определить выходной сигнал пьезоэлектрического преобразователя в виде
 (w) = W (w) (w) = a 11´ R ´exp[ j (– w RC)]´(w),
(w) = W (w) (w) = a 11´ R ´exp[ j (– w RC)]´(w),
то есть выходной сигнал виброизмерительного пьезоэлектрического преобразователя ДН–3–М1 по величине пропорционален входному воздействию и сдвинут на соответствующую задержку.
Анализ полученной амплитудно-частотной характеристики показал, что для расширения частотного диапазона измеряемых величин в сторону низких частот (за счет сдвига точки w0 = ) необходимо увеличивать постоянную времени T = RC. При этом расширение частотного диапазона путем увеличения емкости С осуществляется включением параллельно преобразователю конденсаторов, но из полученного выражения для амплитудно–частотной характеристики следует, что это уменьшает выходное напряжение преобразователя. Увеличение же сопротивления приводит к расширению частотного диапазона без потери чувствительности, однако это требует улучшения качества изоляции и применения усилителей с высокоомным входом.
Подводя итог проведенного исследования виброизмерительного пьезоэлектрического преобразователя ДН–3–М1, можно сделать вывод, что, несмотря на пропорциональность преобразования, данный тип датчика имеет достаточно большую временную задержку. Так, оценки параметров виброизмерительного пьезоэлектрического преобразователя ДН–3–М1 позволили определить постоянную времени RC < 1 с для датчика с усилителем напряжения. Для датчиков с усилителями заряда постоянные времени составляют 10 – 100 с. Однако уже при таких постоянных времени оказывается возможным проводить квазистатическую градуировку пьезоэлектрических датчиков.
Контрольные вопросы
1. Чем определяется выбор рекуррентного типа алгоритма для оценивания контролируемого параметра по экспериментальным данным?
2. В чем сущность общего алгоритма оценки измеряемого параметра?
3. В чем сущность оптимального одношагового алгоритма?
4. Каковы пути повышения сходимости оптимального одношагового алгоритма и сущность его модификации?
5. Какие параметры оптимальности характерны для одношагового алгоритма оценивания контролируемого параметра?
6. Какие начальные условия необходимо использовать для рекуррентного алгоритма оценивания параметра контроля?
ГЛАВА 4. ФОРМИРОВАНИЕ МОДЕЛИ ИЗМЕРЕНИЯ ЗАДАЧИ ОЦЕНИВАНИЯ ПО ЭКСПЕРИМЕНТАЛЬНЫМ ДАННЫМ
Сущность синтеза ММИ заключается в поиске и принятии решений, обеспечивающих выполнение ИИУ предъявляемых к нему требований. Качество полученных решений непосредственно связано со степенью автоматизации процесса синтеза, особенно в условиях увеличения сложности и функционального разнообразия компонентов создаваемой ММИ.
Процедуру принятия решения при синтезе ММИ в соответствии со схемой рис. 4.1 представим в виде следующих взаимосвязанных этапов:
1. Предварительная подготовка: сбор данных и изучение научных концепций, положенных в основу исследуемой проблемной области, определение класса решаемых задач (подзадач), данных и критериев. Выбор основных параметров и их типов, диапазонов их изменения, задание целевых критериев, определяющих качество формируемых решений.
| |||
| Рис.4.1. Основные этапы формирования решения |


 ЛПР
ЛПР2. Выявление причинно-следственных отношений между параметрами и целевыми критериями, представление основных связей между параметрами в явном виде, формирование баз знаний, которые являются отображением сценариев, базирующихся на опыте экспертов, и экспериментальной информации в рассматриваемой проблемной области, разработка моделей синтеза и т.д.
3. Настройка моделей синтеза на решаемую задачу путем адаптации баз знаний к экспериментальным данным в рамках эволюционных методов и обучения.
4. Выбор альтернативного варианта из множества возможных ММИ, удовлетворяющего требованиям задачи оценивания, за счет построения решающего правила на основе методов машинного обучения.
5. Анализ и оценивание выбранного варианта с помощью методов моделирования и использования статистических методов обработки результатов экспериментов.
6. Компьютерный анализ развития наилучшего варианта ММИ и модификация этого варианта с целью улучшения его характеристик.
7. Выбор ЛПР предпочтительного варианта решения на основе оценки соответствия принимаемых решений заданным целям и ограничениям.
Процесс принятия решения является циклическим (рис. 4.1), при этом отдельные этапы многократно повторяются. Особенно важными являются этапы 2, 3, 4, на которых осуществляется анализ технической задачи и определяются сценарии ее предметной области, формируются формальные структуры ММИ и самого процесса синтеза, производится выбор альтернативных вариантов решений. Задачи, решаемые на этих этапах, являются трудно формализуемыми и связаны с моделированием нестрогих, многократно пересматривающихся решений ЛПР, для определения которых формальные системы классической логики не приспособлены. Поэтому для решения данного класса задач целесообразно применять программные инструменты, позволяющие выявлять закономерности в данных, формировать базы знаний и осуществлять генерацию и вывод альтернативных вариантов решений. Так, анализ и оценка генерируемых альтернативных вариантов и их ранжирование (этап 5) может осуществляться стандартными средствами систем моделирования с использованием статистических пакетов для анализа результатов моделирования. Окончательный вариант модели может быть скорректирован на низком уровне путем дополнительного программирования на языке моделирования либо создаваться заново, обеспечивая по возможности вставку и редактирование уже созданных и отлаженных моделей.
Однако с целью сокращения времени исследования для определения наилучшего варианта необходимо управлять процедурой моделирования (этап 6). На рис. 4.1 это соответствует введению обратной связи от блока 6 к блоку 5 (коррекция проектного решения). Если получились неудовлетворительные результаты в процессе моделирования, то производится подготовка новых моделей генерации решений путем дополнения, обучения и адаптации базы знаний (обратная связь из бл.7 в бл.3). При несоответствии выбранного решения целям и ограничениям, происходит уточнение проектной информации (обратная связь из бл.7 в бл. 2) и выбираются другие методы и алгоритмы для решения поставленной задачи. Эта процедура повторяется до получения с точки зрения ЛПР рационального варианта.
При этом следует выделить начальный этап синтеза, качество результатов которого имеют определяющее значение для успешной реализации общей цели синтеза, поскольку на данном этапе формирования ММИ принимаются принципиальные решения о выборе ее структуры и взаимоотношения между ее переменными. Наряду с улучшением качества получаемых решений, автоматизация начальных этапов позволяет значительно снизить сроки разработки как за счет уменьшения времени выполнения данных этапов непосредственно, так и вследствие снижения непроизводительных затрат времени, обусловленного недостаточно обоснованными решениями, получаемыми на начальных этапах разработки. Исследование данного этапа синтеза ММИ будет осуществлено в пятой главе.
Для начального этапа синтеза ММИ характерно наличие неформализованных или трудно формализуемых задач, решение которых, как правило, основано на эвристических подходах. В настоящее время перспектива синтеза ММИ связывается с созданием устройства формирования (УФ) модели измерения в рамках ИИУ.
Начальные стадии синтеза ММИ характеризуются значительным уровнем неопределенности, источниками которой являются неполнота, внутренняя противоречивость данных, неоднозначность и размытость задания на синтез, содержащего приближенные характеристики процесса измерения в виде числовых диапазонов, а также словесное описание целей, ограничений и условий чисто качественного характера, в сложных случаях отсутствие аналитических зависимостей, уравнений, связывающих экспериментальные данные и критерии.
Все это определяет расплывчатость представления о взаимодействии компонентов ММИ. Данные виды неопределенности являются систематическими (не устранимыми) и обусловлены сложностью решаемых задач, лимитом времени на принятие решений и т.д. Кроме этого неточность и неполнота исходных данных может быть вызвана недостаточностью знаний о характере синтезируемой ММИ, новизной решаемых проблем. Попытки применения традиционных математических моделей на ранних стадиях проектирования малоэффективны, поскольку эти методы основаны на обработке точных и полных числовых данных и не соответствуют высокому уровню неопределенности задачи.
Выбор структуры ММИ на начальном этапе ее синтеза определяется неформальными соображениями. Это, во-первых, объясняется тем, что многие критерии, по которым происходит оценка качества и эффективности ММИ, могут быть предварительно определены лишь с невысокой степенью точности, в виде размытых допусков. Во-вторых, далеко не все свойства или характеристики ММИ можно оценить количественными показателями. Из-за отсутствия для таких свойств естественных шкал измерений, они определяются относительно субъективных эталонов, сформированных специалистами при сравнении и ранжировании вариантов.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 1066; Нарушение авторских прав?; Мы поможем в написании вашей работы!