КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Уравновешивание вращающихся масс, расположенных произвольно
|
|
|
|
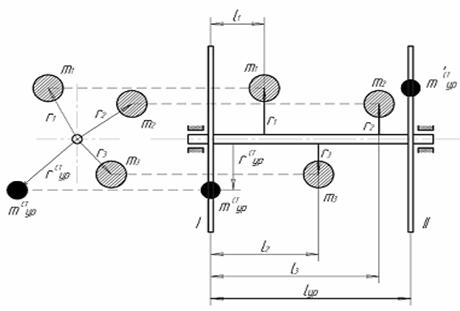
Последовательность уравновешивания масс, расположенных произвольно, рассмотрим на примере ротора с системой четырех неуравновешенных масс (рис. 6.3). Пусть известны величины неуравновешенных масс  и их положения относительно оси вращения ротора, обусловленные радиусами – векторами
и их положения относительно оси вращения ротора, обусловленные радиусами – векторами  и расстояниями
и расстояниями  относительно одной из произвольно выбранных плоскостей I, перпендикулярной оси вращения рассматриваемого ротора.
относительно одной из произвольно выбранных плоскостей I, перпендикулярной оси вращения рассматриваемого ротора.
При вращении ротора и неуравновешенных масс с постоянной угловой скоростью на каждую из масс действует сила инерции
 .
.
Так как угловая скорость в рассматриваемом здесь частном случае является величиной постоянной, то угловое ускорение отсутствует ( = 0) и тангенциальная составляющая силы инерции равна нулю.
= 0) и тангенциальная составляющая силы инерции равна нулю.
а) б)
в) г)
Рис. 6.3. Уравновешивание масс, расположенных произвольно:
а – вид на ротор с торца; б – вид на ротор с боку;
в – план сил при статическом уравновешивании;
г – план моментов сил при динамическом уравновешивании
Выбираем плоскости приведения I и II (см. рис. 6.3), в которых будем располагать уравновешивающие массы.
Задача заключается в том, что необходимо уравновесить массы динамически.
Сначала проводим статическое уравновешивание в плоскости I. Его последовательность описана в предыдущей главе.
 ,
,  ,
,
 . (7)
. (7)
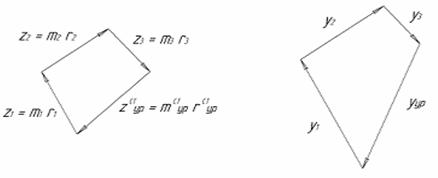
Используя (7), построим векторный многоугольник и графически найдем  .
.
Уравновесим действие инерционных моментов, т.е. выполним условие  . Для этого запишем уравнения
. Для этого запишем уравнения
 ,
,  . (8)
. (8)
Так как  , то из уравнения (8) следует, что
, то из уравнения (8) следует, что
 . (9)
. (9)
Решая графически векторное уравнение (9), находим  .
.
Предварительно выбираем масштаб
 .
.
Тогда уравнение (9) запишется в виде
 .
.
При этом принимаем, что векторы моментов  повернуты на 900 и совпадают с направлением
повернуты на 900 и совпадают с направлением  .
.
 . (10)
. (10)
Находим из (10) величину  , задавшись
, задавшись  , или наоборот. Здесь
, или наоборот. Здесь  равна расстоянию между плоскостями приведения I и II.
равна расстоянию между плоскостями приведения I и II.
Проводя от оси вращения ротора линию, параллельную  , откладываем на ней с противоположных сторон
, откладываем на ней с противоположных сторон  и на концах этих векторов устанавливаем две уравновешивающие массы
и на концах этих векторов устанавливаем две уравновешивающие массы  . Причем одна из них будет расположена в плоскости I, другая – в плоскости II. Массы
. Причем одна из них будет расположена в плоскости I, другая – в плоскости II. Массы  и в плоскости I можно объединить в одну массу.
и в плоскости I можно объединить в одну массу.
Балансировка вращающихся масс (роторов)
Уравновешивание роторов или систем масс используется при проектировании механизмов.
В уже изготовленных роторах встречаются, как было сказано выше, неоднородности материала, возникают неточности изготовления и сборки, в результате чего возникает остаточная неуравновешенность, которую нужно устранять балансировкой.
Различают балансировку:
– статическую, которую производят для достаточно плоских роторов типа дисков, колес, маховиков, шкивов. Ротор при этом устанавливают в опорах с малым трением (например, на призмах) и путем добавления масс или высверливания добиваются безразличного положения балансируемого ротора на опорах;
– динамическую, которую выполняют для роторов, имеющих значительную длину (валы, широкие колеса, шкивы и т.д.), на специальных станках.
Задача балансировки ротора заключается в определении, в выбранных плоскостях коррекции, значений и углов дисбалансов и размещении в этих плоскостях корректирующих масс, дисбалансы которых равны по величине и противоположны по направлению найденным дисбалансам ротора. На практике балансировку проводят: при конструировании - расчетными методами, в процессе изготовления деталей и узлов - экспериментально на специальных балансировочных станках. Балансировка на станках является более точным и надежным методом, по сравнению с расчетными. Поэтому она применяется для ответственных деталей с высокими рабочими частотами вращения. Корректировка масс ротора осуществляется либо присоединением к нему дополнительных корректирующих масс (наплавлением, наваркой или привинчиванием противовесов), либо удалением части массы ротора с “тяжелой” стороны (фрезерованием или высверливанием). Точность балансировки характеризуется величиной остаточного дисбаланса  ротора в каждой из плоскостей коррекции. Величина не должна превышать допустимых для данного класса точности значений, регламентируемых ГОСТ 22061-76.
ротора в каждой из плоскостей коррекции. Величина не должна превышать допустимых для данного класса точности значений, регламентируемых ГОСТ 22061-76.
Балансировка эквивалентна уравновешиванию системы инерционных сил, прикладываемых к подвижному ротору для его равновесия. Эту систему, как и любую произвольную систему сил, можно заменить равнодействующими - главным вектором и главным моментом или двумя векторами, расположенными в произвольных параллельных плоскостях. Для уравновешивания системы сил достаточно уравновесить эти равнодействующие. При балансировке операции над силами заменяют действиями над дисбалансами. Поэтому для жестких роторов вышесказанное можно сформулировать так: жесткий ротор можно уравновесить двумя корректирующими массами, расположенными в двух произвольно выбранных плоскостях, перпендикулярных оси его вращения. Эти плоскости называют плоскостями коррекции.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 494; Нарушение авторских прав?; Мы поможем в написании вашей работы!