КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Уравновешивание масс, находящихся в одной плоскости
|
|
|
|
Уравновешивание вращающихся масс
Положения отдельных неуравновешенных масс  , расположенных на роторе, можно охарактеризовать величинами радиус-векторов
, расположенных на роторе, можно охарактеризовать величинами радиус-векторов  относительно оси его вращения. Система вращающихся масс будет уравновешена, если главный вектор сил инерции, действующих на эти массы при их совместном вращении, равен нулю:
относительно оси его вращения. Система вращающихся масс будет уравновешена, если главный вектор сил инерции, действующих на эти массы при их совместном вращении, равен нулю:
где  – сила инерции, действующая на i-ю массу;
– сила инерции, действующая на i-ю массу;  – сила инерции уравновешивающей массы
– сила инерции уравновешивающей массы  , расположенной на расстоянии
, расположенной на расстоянии  от оси вращения ротора.
от оси вращения ротора.
Сила инерции, действующая на i -ю массу, вращающуюся с постоянной скоростью  , равна
, равна  .
.
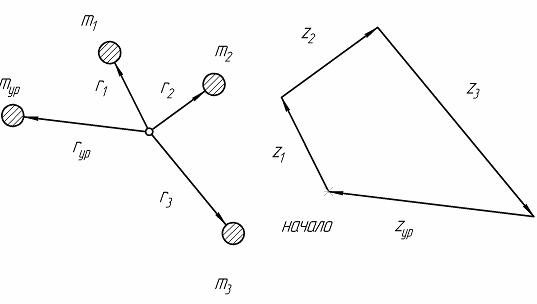
Рассмотрим систему, состоящую из трех неуравновешенных вращающихся масс m1, m2 и m3 (рис. 6.2).
а) б)
Рис. 6.2. Система неуравновешенных масс (а) и план сил инерции (б)
Условием уравновешенности данной системы масс является уравнение
 .
.
Так как , то это уравнение можно записать в виде

Так как  (мы рассматриваем вращающуюся систему масс), то
(мы рассматриваем вращающуюся систему масс), то
 . (6)
. (6)
Уравнение (6) можно решить аналитическим и графическим методами.
При аналитическом методе решения составляются уравнения проекций сил на координатные оси, из которых находят являющееся неизвестным последнее слагаемое.
Найдем  и
и  графическим методом, то есть построением векторного многоугольника (см. рис. 6.2, б), являющегося графической интерпретацией векторного уравнения (6). Предварительно выбираем масштаб сил
графическим методом, то есть построением векторного многоугольника (см. рис. 6.2, б), являющегося графической интерпретацией векторного уравнения (6). Предварительно выбираем масштаб сил
 ,
,
где z 1 – длина вектора, изображающего силу  , (мм).
, (мм).
Размерность масштаба  (если масса задана в кг, радиус – в м).
(если масса задана в кг, радиус – в м).
Переведем масштабом  другие известные слагаемые уравнения (6) в векторные отрезки:
другие известные слагаемые уравнения (6) в векторные отрезки:

Тогда векторное уравнение (6) запишется в виде
 .
.
Построив векторный силовой многоугольник (см. рис. 6.2, б) в масштабе  , из него определим длину вектора
, из него определим длину вектора  . Выбрав из конструктивных соображений величину
. Выбрав из конструктивных соображений величину  , вычисляем уравновешивающую массу
, вычисляем уравновешивающую массу
 .
.
Поместив ее на роторе в направлении вектора на расстоянии от оси вращения, равном длине этого вектора, уравновесим ротор.
На практике наиболее часто статическое уравновешивание проводят:
- выбирая симметричные схемы механизма;
- устанавливая на звеньях механизма противовесы (или корректирующие массы);
- размещая противовесы на дополнительных звеньях или кинематических цепях.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 564; Нарушение авторских прав?; Мы поможем в написании вашей работы!