КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Выбор типа регулятора
|
|
|
|
Классификация регуляторов
Типовая структурная схема регулятора
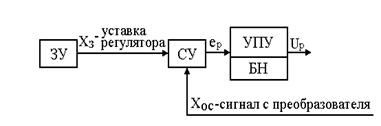 Рис.2.12. Типовая структурная схема
автоматического регулятора
Рис.2.12. Типовая структурная схема
автоматического регулятора
|
Автоматический регулятор (рис. 2.12) состоит из: ЗУ - задающего устройства, СУ - сравнивающего устройс-тва, УПУ- усилительно-преобразующего устрой-ства, БН - блока настроек.
Задающее устройство должно вырабатывать высоко стабильный сигнал задания (уставку регулятора), либо изменять его по определенной программе. Сравнивающее устройство позволяет сопоставлять сигнал задания с сигналом обратной связи и, тем самым, сформировать величину ошибки регулирования  Усилительно-преобразующее устройство состоит из блока формирования алгоритма регулирования, блока настройки параметров этого алгоритма и усилителя мощности. В промышленных регуляторах имеется также переключатель “Прямой - Обратный”, с помощью которого может инвертироваться величина приращения сигнала управления. Выбор положения этого переключателя осуществляется таким образом, чтобы обеспечить отрицательную обратную связь в системе.
Усилительно-преобразующее устройство состоит из блока формирования алгоритма регулирования, блока настройки параметров этого алгоритма и усилителя мощности. В промышленных регуляторах имеется также переключатель “Прямой - Обратный”, с помощью которого может инвертироваться величина приращения сигнала управления. Выбор положения этого переключателя осуществляется таким образом, чтобы обеспечить отрицательную обратную связь в системе.
Автоматические регуляторы классифицируются по назначению, принципу действия, конструктивным особенностям, виду используемой энергии, характеру изменения регулирующего воздействия и т.п.
По принципу действия они подразделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действия не используют внешнюю энергию для процессов управления, а используют энергию самого объекта управления (регулируемой среды). Примером таких регуляторов являются регуляторы давления. В автоматических регуляторах непрямого действия для его работы требуется внешний источник энергии.
По роду действия регуляторы делятся на непрерывные и дискретные. Дискретные регуляторы, в свою очередь, подразделяются на релейные, цифровые и импульсные.
По виду используемой энергии они подразделяются на электрические (электронные), пневматические, гидравлические, механические и комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы.
По закону регулирования они делятся на двух- и трехпозиционные регуляторы, типовые регуляторы (интегральные, пропорциональны, пропорционально-дифференциальные пропорционально-интегральные, и пропорционально-интегрально-дифференциальные регуляторы - сокращенно И, П, ПД, ПИ и ПИД - регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы. Двухпозиционные регуляторы нашли широкое распространение, благодаря своей простоте и малой стоимости.
По назначению регуляторы подразделяются на специализированные (например, регуляторы уровня, давления, температуры и т.д.) и универсальные с нормированными входными и выходными сигналами и пригодные для управления различными параметрами.
По виду выполняемых функций регуляторы подразделяются на регуляторы автоматической стабилизации, программные, корректирующие, регуляторы соотношения параметров и другие.
Задача проектировщика состоит в выборе такого типа регулятора, который при минимальной стоимости и максимальной надежности обеспечивал бы заданное качество регулирования.
Разработчиком могут быть выбраны релейные, непрерывные или дискретные (цифровые) типы регуляторов.
Для того, чтобы выбрать тип регулятора и определить его настройки необходимо знать:
1. Статические и динамические характеристики объекта управления.
2. Требования к качеству процесса регулирования.
3. Показатели качества регулирования для серийных регуляторов.
4. Характер возмущений, действующих на процесс регулирования.
Выбор типа регулятора обычно начинается с простейших двухпозиционных регуляторов и может заканчиваться самонастраивающимися микропроцессорными регуляторами. Заметим, что по требованиям технологического регламента многие объекты не допускают применения релейного управляющего воздействия.
Рассмотрим показатели качества серийных регуляторов. В качестве серийных предполагаются непрерывные регуляторы, реализующие И, П, ПИ и ПИД - законы управления.
Теоретически, с усложнением закона регулирования качество работы системы улучшается. Известно, что на динамику регулирования наибольшее влияние оказывает величина отношения запаздывания к постоянной времени объекта  Эффективность компенсации ступенчатого возмущения регулятором достаточно точно может характеризоваться величиной динамического коэффициента регулирования
Эффективность компенсации ступенчатого возмущения регулятором достаточно точно может характеризоваться величиной динамического коэффициента регулирования  , а быстродействие - величиной времени регулирования.
, а быстродействие - величиной времени регулирования.
Минимально возможное время регулирования для различных типов регуляторов при оптимальной их настройке определяется таблицей 2.1.
Таблица 2.1.
| Закон регулированя | П | ПИ | ПИД |

| 6,5 |
где  - время регулирования,
- время регулирования,  - запаздывание в объекте.
- запаздывание в объекте.
Теоретически, в системе с запаздыванием, минимальное время регулирования 
Руководствуясь таблицей можно утверждать, что наибольшее быстродействие обеспечивает П-закон управления. Однако, если коэффициент усиления П-регулятора  мал (чаще всего это наблюдается в системах с запаздыванием), то такой регулятор не обеспечивает высокой точности регулирования, т.к. в этом случае велика величина статической ошибки. Если имеет величину равную 10 и более, то П-регулятор приемлем, а если
мал (чаще всего это наблюдается в системах с запаздыванием), то такой регулятор не обеспечивает высокой точности регулирования, т.к. в этом случае велика величина статической ошибки. Если имеет величину равную 10 и более, то П-регулятор приемлем, а если  , то требуется введение в закон управления интегральной составляющей.
, то требуется введение в закон управления интегральной составляющей.
Наиболее распространенным на практике является ПИ-регулятор, который обладает следующими достоинствами:
1. Обеспечивает нулевую статическую ошибку регулирования.
2. Достаточно прост в настройке, т.к. настраиваются только два параметра, а именно коэффициент усиления и постоянная интегрирования  . В таком регуляторе имеется возможность оптимизации
. В таком регуляторе имеется возможность оптимизации  , что обеспечивает управление с минимально возможной средне-квадратичной ошибкой регулирования.
, что обеспечивает управление с минимально возможной средне-квадратичной ошибкой регулирования.
3. Малая чувствительность к шумам в канале измерения (в отличии от ПИД-регулятора).
Для наиболее ответственных контуров можно рекомендовать использование ПИД-регулятора, обеспечивающего наиболее высокое быстродействие в системе. Обнако следует учитывать, что это условие выполняется только при его оптимальных настройках (настраиваются три параметра). С увеличением запаздывания в системе резко возрастают отрицательные фазовые сдвиги, что снижает эффект действия дифференциальной составляющей регулятора. Поэтому качество работы ПИД-регулятора для систем с большим запаздыванием становится сравнимо с качеством работы ПИ-регулятора. Кроме этого, наличие шумов в канале измерения в системе с ПИД-регулятором приводит к значительным случайным колебаниям управляющего сигнала регулятора, что увеличивает дисперсию ошибки регулирования и износ исполнительного механизма. Таким образом, ПИД-регулятор следует выбирать для систем регулирования, с относительно малым уровнем шумов и величиной запаздывания в объекте управления. Примерами таких систем является системы регулирования температуры.
При выборе типа регулятора рекомендуется ориентироваться на величину отношения запаздывания к постоянной времени в объекте  . Если
. Если  то можно выбрать релейный, непрерывный или цифровой регуляторы. Если
то можно выбрать релейный, непрерывный или цифровой регуляторы. Если  , то должен быть выбран непрерывный или цифровой, ПИ- или ПИД-регулятор. Если
, то должен быть выбран непрерывный или цифровой, ПИ- или ПИД-регулятор. Если  , то выбирают специальный цифровой регулятор с упредителем, который компенсирует запаздывание в контуре управления. Однако этот же регулятор рекомендуется применять и при меньших отношениях .
, то выбирают специальный цифровой регулятор с упредителем, который компенсирует запаздывание в контуре управления. Однако этот же регулятор рекомендуется применять и при меньших отношениях .
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1557; Нарушение авторских прав?; Мы поможем в написании вашей работы!