КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Оптимальная настройка регуляторов по номограммам
|
|
|
|
В отличии от формульного метода, метод расчета по номограммам позволяет более точно определить настройки регулятора, т.к. учитывает наличие нелинейной зависимости между параметрами настройки регулятора и величиной отношения  .
.
Существуют номограммы для расчета настроек ПИ и ПИД-регуляторов для объектов первого и второго порядков с запаздыванием.
Предположим, что объект управления описывается звеном первого порядка с запаздыванием, а оптимальный процесс регулирования - это процесс с 20%-ным перерегулированием. Соответствующая номограмма расчета настроек ПИ-регулятора приведена на рис.2.13 / 2 /.
Следует иметь ввиду, что современные электронные и микропроцессорные регуляторы реализуют ПИ- и ПИД-законы регулирования с зависимыми настройками, а пневматические регуляторы - с независимыми настройками вида
 .
.
Дифференциальная составляющая промышленных регуляторов обычно реализуется в виде
 ,
,
где  - коэффициент усиления по дифференциальной составляющей (выбирается в диапазоне 1 ¸ 10.,
- коэффициент усиления по дифференциальной составляющей (выбирается в диапазоне 1 ¸ 10.,  - постоянная времени фильтра). Эти параметры определяются из соотношения
- постоянная времени фильтра). Эти параметры определяются из соотношения
 .
.
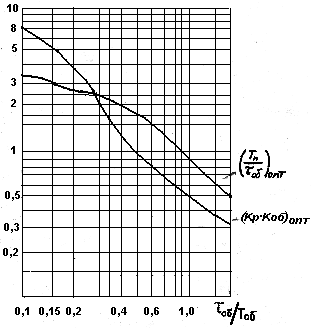 Рис.2.13.Номограмма для расчета
настроек ПИ-регулятора
Рис.2.13.Номограмма для расчета
настроек ПИ-регулятора
|
Чем выше уровень помех в выходном сигнале объекта, тем меньше рекомендуется брать величину . Это будет способствовать уменьшению величины средней квадратичной ошибки регулирования.
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1005; Нарушение авторских прав?; Мы поможем в написании вашей работы!