КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тема: реализация силы тяги
|
|
|
|
Лекция № 6, 7
А. Приводные блоки стационарных транспортных машин.
Б. Ведущие колеса и гусеницы самоходных транспортных машин
Вопросы для рассмотрения:
- Общие положения реализации силы тяги у стационарных транспортных машин.
- Реализация тягового усилия навивкой на барабан.
- Реализация тягового усилия трением.
3.1. Общие замечания.
3.2. Однобарабанный привод. Минимальное натяжение ленты по сцеплению.
3.3. Двухбарабанный привод с жесткой кинематической связью барабанов.
3.4. Тандемпривод. Определение минимального натяжения по сцеплению.
3.5. Сравнительная оценка схем привода.
- Реализация тягового усилия зацеплением.
4.1. Кинематика зацепления.
4.2. Скорость и ускорение цепи.
4.3. Динамические нагрузки в тяговых цепях.
- Общие положения реализации силы тяги у самоходных транспортных машин.
- Сила тяги одной ведущей оси.
- Сила тяги локомотива.
- Коэффициент сцепления.
- Реализация силы торможения.
 Раздаточный материал:
Раздаточный материал:
1. Схемы огибания (заводки) гибким тяговым органом.
2. Коэффициент трения ленты с резиновыми обкладками о барабан.
3. Передача тягового усилия трением на двухбарабанном приводе.
4. Коэффициент использования прочности ленты.
5. К расчету кинематических параметров тяговой цепи.
6. Схемы движителей самоходных машин.
7. Реализация силы тяги и силы торможения.
8. Значения расчетного коэффициента сцепления электровозов.
6. Реализация силы тяги
А. Приводные блоки стационарных транспортных машин.
6.1. Общие положения.
Под приводным блоком понимают элемент транспортного средства, который реализует силу тяги исполнительному органу, непосредственно перемещающему транспортируемый груз.
Подавляющее большинство стационарных транспортных средств (у них двигатели не перемещаются вместе с грузом) горных предприятий (конвейеры, канатные установки) реализуют тяговое усилие приводными блоками посредством: навивки тягового органа – концевого каната – на один или два цилиндрических барабана (разомкнутый контур – один конец каната закреплен на барабане); круглыми барабанами или шкивами трения (замкнутый контур) когда гибкий тяговый орган (лента, канат) не закреплен на барабане и тяговое усилия от него передается за счет сил трения; зацеплением (замкнутый контур, цепи и приводные звездочки, граненые барабаны с гнездами для элементов цепи).
6.2. Реализация тягового усилия навивкой на барабан.
Осуществляется на транспортных средствах с одним (рис. 6.1, а) или двумя (рис. 6.1, б) концевыми канатами, закрепленными одним концом на одном или двух барабанах. В последнем случае одновременно, на один барабан канат навивается, а с другого – сматывается. Во всех случаях канат всегда растянут, движения груза к барабану осуществляется усилием этого барабана, а от него – другими силами (продольной составляющей веса груза и каната, другой лебедкой или барабаном и др.).
В транспортных средствах по рис. 6.1. от двигателя через редуктор передается крутящий момент  валу, где жестко закреплен барабан или непосредственно барабану.
валу, где жестко закреплен барабан или непосредственно барабану.
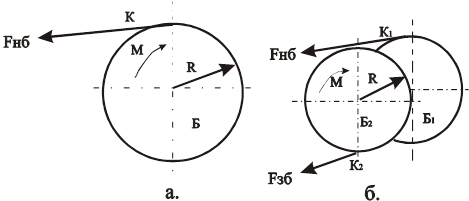
Рис. 6.1. Реализация силы тяги навивкой каната на барабан
Режим работы лебедки по рис. 6.1, а, зависит от направления движения каната: наматывание – тяговый, разматывание – тормозной (генераторный). Режим работы двухбарабанной лебедки по рис. 6.1, б, определяется не направлением вращения барабана, а величинами  и
и  : при
: при  – тяговый, при
– тяговый, при  – тормозной.
– тормозной.
Для обоих вариантов справедливо уравнение:
 , (6.1)
, (6.1)
из которого можно определить режим работы.
Предельные значения величины силы тяги на окружности барабана, как и величины натяжения гибкого тягового органа определяются здесь мощностью двигателя и прочностью элементов транспортного средства: канатов, барабанов, валов, редуктора, тормозов.
6.3. Реализация тягового усилия трением.
6.3.1. Общие замечания.
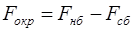
Передача силы тяги замкнутому контуру гибкого тягового элемента (ленте, канату) осуществляется за счет сил трения скольжения этого элемента на плоскости контакта с поверхностью ведущего барабана (лента) или шкива (канат). Лента обычно огибает (рис. 6.2, а) один или два барабана с углом обхвата, примерно, 180°-240° на каждом. Канат может охватывать приводной шкив 1-3 и более раза (рис. 6.2, б) с углом обхвата 180°-900° и более. Прижатие тягового органа к поверхности трения осуществляется, как правило, за счет его натяжения.
Рис. 6.2. Схемы огибания (заводки) гибким тяговым органом
(а – лента; б – канат) приводных блоков
В основу объяснения процесса передачи тягового усилия трением (барабан – лента, шкив трения – канат) положен известный закон трения гибких тел Л.Эйлера. Им установлено, что при скольжении идеальной нити (невесомая, нерастяжимая, абсолютно гибкая) по неподвижному барабану от приложенных на ее концах сил натяжения, отношение большего натяжения к меньшему есть величина постоянная.
 , (6.2)
, (6.2)
где:  – коэффициент трения скольжения;
– коэффициент трения скольжения;  – угол обхвата, рад.
– угол обхвата, рад.
Здесь (рис. 6.3)  на величину сил трения скольжения на участке 1-2.
на величину сил трения скольжения на участке 1-2.
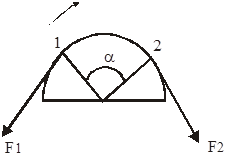
Рис. 6.3. К закону Эйлера о трении гибких тел
Исследования, проводившиеся в этом направлении в течение более двухсот лет после опубликования Эйлером (1765 г.) этого закона, посвящены, в основном, уточнениям и возможности применения его для реальных гибких тел – ленты конвейера, ремня ременной передачи, каната. Среди фундаментальных работ заслуживают внимания работы Кретца, а позже – Петрова и Жуковского.
Доказано, что при передаче тягового усилия приводным барабаном рястяжимому гибкому элементу (см. рис. 6.4, тяговый режим работы) длина каждого участка тягового элемента в месте набегания на барабан  больше длины
больше длины  из-за того, что . Сокращение гибкого элемента происходит со стороны сбегания на дуге
из-за того, что . Сокращение гибкого элемента происходит со стороны сбегания на дуге  (дуга упругого скольжения, активная дуга обхвата). Именно на этой дуге передается тяговое усилие, равное
(дуга упругого скольжения, активная дуга обхвата). Именно на этой дуге передается тяговое усилие, равное  , с увеличением которого увеличивается и уменьшается
, с увеличением которого увеличивается и уменьшается  (дуга покоя, пассивная дуга обхвата). При
(дуга покоя, пассивная дуга обхвата). При  , когда
, когда  наступает полная пробуксовка (скольжение по всей дуге). В тяговом режиме упругое скольжение гибкого элемента имеет скорость, направленную против движения барабана, при тормозном – наоборот (тоже со стороны сбегания).
наступает полная пробуксовка (скольжение по всей дуге). В тяговом режиме упругое скольжение гибкого элемента имеет скорость, направленную против движения барабана, при тормозном – наоборот (тоже со стороны сбегания).

Рис. 6.4. К объяснению упругого скольжения
Для любого соотношения сил и , когда нет полной пробуксовки, справедлива формула Эйлера  , где – дуга упругого скольжения.
, где – дуга упругого скольжения.
Такая картина передачи тягового усилия растяжимому гибкому элементу позволяет применять формулу Эйлера при определении минимальных натяжений ленты, каната и др. на приводном барабане при заданных значениях тягового усилия для работы без полной пробуксовки.
6.3.2. Однобарабанный привод. Минимальное натяжение ленты по сцеплению.
На рис. 6.5, а) показано направление движения ленты и барабана при работе без полной пробуксовке в любом режиме (тяговом и тормозном). При срыве сцепления (полной пробуксовке) барабан продолжает вращаться, что равноценно скольжению ленты по неподвижному барабану в обратную сторону при тяговом режиме рис. 6.5, б), и в ту же сторону рис. 6.5, в) при тормозном режиме. Это соответствует условиям задачи Эйлера.
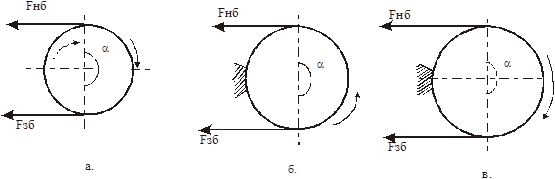
Рис. 6.5. К определению минимального натяжения по сцеплению для однобарабанного привода
При известном и для заданного значения передаваемой барабаном силы тяги  необходимо определить минимальное , при котором бы не было полной пробуксовки.
необходимо определить минимальное , при котором бы не было полной пробуксовки.
По формуле Эйлера:
 . (6.3)
. (6.3)
Известно, что  . После подстановки значения из этого выражения в формулу Эйлера получим:
. После подстановки значения из этого выражения в формулу Эйлера получим:  . Это выражение дает минимальное для заданного
. Это выражение дает минимальное для заданного  , но при срыве сцепления (полной пробуксовке). Чтобы срыва сцепления не было, значение
, но при срыве сцепления (полной пробуксовке). Чтобы срыва сцепления не было, значение  определяют для большего, чем задано, значения :
определяют для большего, чем задано, значения :
 , (6.4)
, (6.4)
где  – коэффициент запаса тяговой способности.
– коэффициент запаса тяговой способности.
При тормозном режиме  значение будет отрицательно. По рис 6.5, в) при срыве сцепления барабан относительно ленты останавливается, а лента скользит по нему в направлении, показанном стрелкой. Тогда, аналогично предыдущему
значение будет отрицательно. По рис 6.5, в) при срыве сцепления барабан относительно ленты останавливается, а лента скользит по нему в направлении, показанном стрелкой. Тогда, аналогично предыдущему
 (6.5)
(6.5)
Величину  называют тяговым фактором привода. Чем этот фактор больше, тем меньше нужно натягивать предварительно ленту, чтобы предать заданное значение тягового усилия , тем привод лучше.
называют тяговым фактором привода. Чем этот фактор больше, тем меньше нужно натягивать предварительно ленту, чтобы предать заданное значение тягового усилия , тем привод лучше.
6.3.3. Двухбарабанный привод с жесткой кинематической связью барабанов.
1. Определение минимального натяжения ленты по сцеплению.
Тяговый фактор привода  можно повысить за счет повышения либо за счет повышения . В первом случае применяют футеровку приводных барабанов материалами, повышающими , во втором – двухбарабанные приводы. Последние могут быть выполнены с жесткой кинематической связью, когда угловые скорости вращения барабанов одинаковы (шестеренчатый редуктор с двумя выходными валами) и нежесткую, когда эти скорости могут быть и разными (дифференциальный редуктор, или индивидуальный привод каждого барабана).
можно повысить за счет повышения либо за счет повышения . В первом случае применяют футеровку приводных барабанов материалами, повышающими , во втором – двухбарабанные приводы. Последние могут быть выполнены с жесткой кинематической связью, когда угловые скорости вращения барабанов одинаковы (шестеренчатый редуктор с двумя выходными валами) и нежесткую, когда эти скорости могут быть и разными (дифференциальный редуктор, или индивидуальный привод каждого барабана).
Определим минимальное значение натяжения ленты по сцеплению () для привода с жесткой кинематической связью.
Дано (рис. 6.6, а): – общее тяговое усилие привода (положительное);  . Определить – минимальное натяжение по сцеплению.
. Определить – минимальное натяжение по сцеплению.
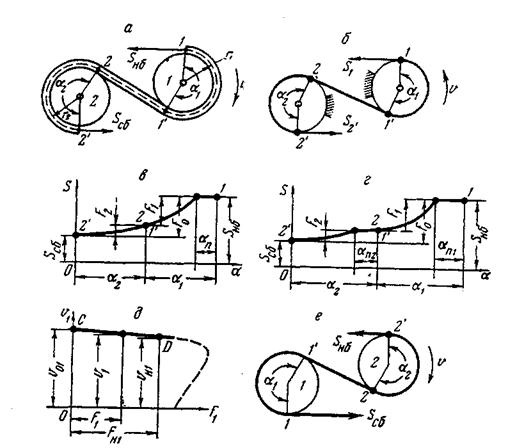
Рис. 6.6. Передача тягового усилия трением на двухбарабанном приводе
При срыве сцепления лента останавливается, а оба барабана вращаются, что равноценно скольжению ленты по неподвижным барабанам (рис. 6.6, б). Тогда по формуле Эйлера:
 ; (6.6)
; (6.6)
 ;
;
 .
.
Следовательно, определяется как и для однобарабанного привода с углом обхвата, равным 
 . (6.7)
. (6.7)
2. Определение распределения тягового усилия между барабанами с жесткой кинематической связью.
Дано (рис. 6.6, а): – сила тяги двух барабанов  ;
;  и
и  – углы обхвата;
– углы обхвата;  – радиусы барабанов; – коэффициент трения одинаков на обоих барабанах. Определить
– радиусы барабанов; – коэффициент трения одинаков на обоих барабанах. Определить  – долю тягового усилия второго барабана
– долю тягового усилия второго барабана  в передаче общего усилия .
в передаче общего усилия .
При срыве сцепления:
 , а
, а  , (6.8)
, (6.8)
или
 , а
, а  ,
,
откуда при срыве сцепления:
 . (6.9)
. (6.9)
Если срыва сцепления нет, то в зоне точки 1 имеется дуга покоя (рис. 6.6, в). При увеличении и неизменном дуга покоя сокращается,  растет, а
растет, а  не изменяется (на втором барабане дуги покоя нет), а следовательно
не изменяется (на втором барабане дуги покоя нет), а следовательно  переменно и зависит от (до срыва сцепления).
переменно и зависит от (до срыва сцепления).
Привод весьма чувствителен к размерам и форме барабанов. Скорость ленты определяется скоростью  в точке 1 (дуга покоя). Если
в точке 1 (дуга покоя). Если  , то по всей дуге лента скользит, так как
, то по всей дуге лента скользит, так как  , а скорости барабанов одинаковы, и барабан 2 обгоняет ленту. Если
, а скорости барабанов одинаковы, и барабан 2 обгоняет ленту. Если  , то скорость скольжения возрастает. Если , то скорость скольжения уменьшается, но при повышении разности
, то скорость скольжения возрастает. Если , то скорость скольжения уменьшается, но при повышении разности  и
и  лента обгоняет барабан 2 и он переходит в тормозной режим. Если барабаны неконцентричны или имеют некруглую форму, то такой переход происходит периодически, сопровождаясь рывками ленты на приводе. По указанным причинам барабаны изготовляют стальными точеными без футеровки, из-за которой размеры и форму барабанов выдержать трудно.
лента обгоняет барабан 2 и он переходит в тормозной режим. Если барабаны неконцентричны или имеют некруглую форму, то такой переход происходит периодически, сопровождаясь рывками ленты на приводе. По указанным причинам барабаны изготовляют стальными точеными без футеровки, из-за которой размеры и форму барабанов выдержать трудно.
6.3.4. Тандемпривод. Определение минимального натяжения по сцеплению
Поскольку двухбарабанный привод с жесткой кинематической связью барабанов (см. выше) не допускает футеровки барабанов, то его тяговая способность невысока. Для ее повышения барабаны необходимо футеровать фрикционными материалами, но при этом неизбежна разница в диаметрах барабанов, в связи с чем они должны иметь возможность вращаться с различными угловыми скоростями. Наиболее распространенным решением является применение тандемпривода, когда каждый барабан имеет самостоятельный двигатель или реже – привода с дифференциальным редуктором. При этих схемах барабаны вращаются с различными угловыми скоростями, чем компенсируется разница в радиусах барабанов. Распределение общего тягового усилия между барабанами принимается пропорциональным мощностям двигателей барабанов.
Дано (рис. 6.6, а): (положительное), и ;  и коэффициент сцепления . Определить
и коэффициент сцепления . Определить  по сцеплению.
по сцеплению.
Если заданное  (
( – доля второго барабана для режима срыва сцепления на приводе с жесткой связью), то распределение нагрузки между барабанами будет такое же, как и у привода с жесткой кинематической связью при срыве сцепления, поэтому срыв сцепления начинается на обоих барабанах одновременно и определяется как и для привода с жесткой связью (по суммарному углу обхвата).
– доля второго барабана для режима срыва сцепления на приводе с жесткой связью), то распределение нагрузки между барабанами будет такое же, как и у привода с жесткой кинематической связью при срыве сцепления, поэтому срыв сцепления начинается на обоих барабанах одновременно и определяется как и для привода с жесткой связью (по суммарному углу обхвата).
Если  (что имеет место на всех существующих приводах, где ставят или на оба барабана одинаковые двигатели, или на первый – два, а на второй один), то второй барабан несет большую нагрузку по сравнению с вариантом , срыв сцепления начинается только на втором барабане и находится по срыву сцепления не на всем приводе в целом, а только на втором барабане. Тогда
(что имеет место на всех существующих приводах, где ставят или на оба барабана одинаковые двигатели, или на первый – два, а на второй один), то второй барабан несет большую нагрузку по сравнению с вариантом , срыв сцепления начинается только на втором барабане и находится по срыву сцепления не на всем приводе в целом, а только на втором барабане. Тогда
 . (6.10)
. (6.10)
где  – тяговое усилие второго барабана. Наиболее распространенный вариант
– тяговое усилие второго барабана. Наиболее распространенный вариант  ; иногда применяют вариант
; иногда применяют вариант  (одна треть нагрузки на второй барабан).
(одна треть нагрузки на второй барабан).
6.3.5. Сравнительная оценка схем привода.
Для конкретного конвейера выбор схемы привода производят по результатам численных расчетов натяжения ленты в сравниваемых вариантах. Общую оценку можно сделать по влиянию схемы привода на максимальное натяжение ленты при передаче одинакового тягового усилия.
Если представить  (идеальный привод с бесконечно большим коэффициентом трения), то
(идеальный привод с бесконечно большим коэффициентом трения), то  и в этом случае
и в этом случае  , т.е. натяжение ленты равнялось бы тяговому усилию и ее прочность использовалась бы, полезно на 100 %. В реальном приводе
, т.е. натяжение ленты равнялось бы тяговому усилию и ее прочность использовалась бы, полезно на 100 %. В реальном приводе  ,
,  и лента, помимо «полезного» натяжения
и лента, помимо «полезного» натяжения  должна иметь дополнительное натяжение, равное .
должна иметь дополнительное натяжение, равное .
Коэффициент использования прочности ленты
 . (6.11)
. (6.11)
Чем с большей силой приходится натягивать ленту для передачи одного и того же  , тем меньше
, тем меньше  .
.
6.4. Реализация тягового усилия зацеплением.
6.4.1. Кинематика зацепления.
Цепные тяговые органы транспортных средств приводятся в движение вращающимися многоугольниками, звездочками или же поступательно движущимися цепными тяговыми органами со специальными кулаками, захватами и др. (линейные приводы), которые в свою очередь приводятся в движение вращающимися барабанами, звездочками, т.е. зацеплением.
При огибании цепью звездочки центры шарниров (центры поворота звеньев цепи) располагаются в вершинах правильного многоугольника с длиной стороны, равной или кратной шагу цепи  (рис. 6.8). Для кольцевых цепей зацепление носит неупорядоченный характер и для надежности следует вводить длину стороны, равную двойному шагу цепи, т.к. при изношенных элементах звенья цепи, располагающиеся в вертикальной плоскости, в зацеплении не участвуют. Число граней многоугольника
(рис. 6.8). Для кольцевых цепей зацепление носит неупорядоченный характер и для надежности следует вводить длину стороны, равную двойному шагу цепи, т.к. при изношенных элементах звенья цепи, располагающиеся в вертикальной плоскости, в зацеплении не участвуют. Число граней многоугольника  равно числу звеньев цепи (для кольцевых цепей – числу пар звеньев), на которые цепь переместится при повороте звездочки на один оборот. Число зубьев и – это не всегда одно и то же. По рис. 6.8, а) равно числу зубьев, но бывают случаи, когда звездочки совсем не имеют зубьев, превращаясь в граненый барабан, или имеют половинное по сравнению с рис. 6.8, а) число зубьев (зубья через один удаляются при четном числе граней).
равно числу звеньев цепи (для кольцевых цепей – числу пар звеньев), на которые цепь переместится при повороте звездочки на один оборот. Число зубьев и – это не всегда одно и то же. По рис. 6.8, а) равно числу зубьев, но бывают случаи, когда звездочки совсем не имеют зубьев, превращаясь в граненый барабан, или имеют половинное по сравнению с рис. 6.8, а) число зубьев (зубья через один удаляются при четном числе граней).
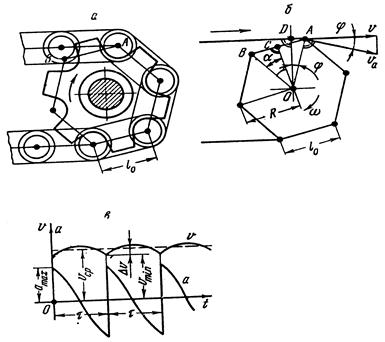
Рис. 6.8. К расчету кинематических параметров тяговой цепи
6.4.2. Скорость и ускорение цепи.
Из рис. 6.8, а) следует, что в любом случае зацепления цепи со звездочкой можно заменить взаимодействием эквивалентного многоугольника (рис. 6.8, б).
Постановка задачи. Дано (рис. 6.8, а): – число звеньев звездочки; – длина грани эквивалентного многоугольника, м;  – угловая скорость звездочки, рад/с. Определить скорость и ускорение цепи.
– угловая скорость звездочки, рад/с. Определить скорость и ускорение цепи.
На рис. 6.8, б) цепь ведется (приводится в движение) вершиной А, скорость которой
 , м/с (6.13)
, м/с (6.13)
где  – радиус траектории движения вершины, м.
– радиус траектории движения вершины, м.
Скорость цепи равна проекции  на линию движения цепи
на линию движения цепи
 , м/с (6.14)
, м/с (6.14)
где  – угол между
– угол между  и или, что то же, угол между ОА и вертикалью.
и или, что то же, угол между ОА и вертикалью.
На рис. 6.8, в) показан график изменения .
Обозначим – половину угла между радиусами, проведенными в соседние вершины многоугольника. Из 
 . (6.15)
. (6.15)
Угол изменяется от – в начале зацепления шарнира до +в конце зацепления, в соответствии с чем непрерывно изменяется (рис. 6.8, в). Период зацепления одного шарнира  равен времени перемещения цепи на длину одной грани :
равен времени перемещения цепи на длину одной грани :
 , с, (6.16)
, с, (6.16)
где  – средняя скорость движения цепи, м/с.
– средняя скорость движения цепи, м/с.
Если период одного оборота звездочки Т, то
 , м/с. (6.17)
, м/с. (6.17)
Ускорение цепи
 , (6.18)
, (6.18)
в соответствии с чем график а (рис. 6.8, в) представляет собой пилообразную кривую. Максимальное ускорение соответствует  , т.е. началу зацепления очередного шарнира. Тогда
, т.е. началу зацепления очередного шарнира. Тогда  . Подставляя сюда
. Подставляя сюда  и
и  получим
получим
 , м/с2, (6.19)
, м/с2, (6.19)
т.е.  пропорционально квадрату скорости движения цепи.
пропорционально квадрату скорости движения цепи.
Неравномерность движения цепи является источником динамических нагрузок. Помимо этого, с ростом скорости движения возрастают удары при входе в зацепление очередного шарнира и увеличивается износ трущихся частей. Вследствие этого конвейеры с цепным тяговым органом делают тихоходными (скорость не превышает 1,2-1,5 м/с).
6.4.3. Динамические нагрузки в тяговых цепях.
Тяговая цепь забойного скребкового конвейера может резко затормозиться (заклиниться) в результате зацепления скребка за выступы и т.п. Кинетическая энергия вращения ротора гасится за счет деформации тягового органа и деталей привода из-за чего появляются значительные экстренные динамические нагрузки. Для их ограничения применяют предохранительные устройства (срезные штифты, фрикционные муфты, турбомуфты, дробовые муфты и др.), которые при достижении некоторого вращающего момента начинают проскальзывать, ликвидируя жесткую связь ротора с редуктором, тем самым ликвидируя возможность передачи ударной нагрузки со стороны ротора.
Качество предохранительных устройств оценивается по коэффициенту нагрузки
 , (6.20)
, (6.20)
где  – максимальное усилие в тяговом органе при заклинивании;
– максимальное усилие в тяговом органе при заклинивании;  – усилие при установившемся режиме с номинальной (паспортной) нагрузкой конвейера.
– усилие при установившемся режиме с номинальной (паспортной) нагрузкой конвейера.
Б. Ведущие колеса и гусеницы самоходных транспортных машин
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1515; Нарушение авторских прав?; Мы поможем в написании вашей работы!