КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Система автоматического регулирования угловой скорости с жесткой отрицательной обратной связью по угловой скорости двигателя
|
|
|
|
Необходимо выделить главные стратегии ИМК.
1. Интеграция выбора: как наиболее эффективно сочетать средства рекламы и стимулирования сбыта для достижения целей коммуникации.
2. Интеграция позиционирования: каким образом каждый из видов рекламных коммуникаций и связанное с продвижением рекламное обращение могут быть согласованны с позиционированием марки с точки зрения их синергического взаимодействия. Здесь имеется в виду, что совместные усилия по рекламной кампании должны дать лучший результат, чем если бы эти кампании проводились независимо друг от друга. Синергизм - распространенный деловой термин, обозначающий, что общий результат превосходит простую сумму отдельных составляющих.
3. Интеграция плана-графика: в каких точках маркетинговых каналов PC достигают покупателем и, возможно, увеличивают скорость принятия решений и пользу нашей торговой марки.
[1] Дэвис С. М. Коммуникации: воплощение позиции торговой марки в жизнь//Отрывок из книги "Управление активами торговой марки"
На структурной схеме рис.6.4 а: РГ −регулятор скорости пропорционального типа, П −управляемый преобразователь напряжения, М – двигатель постоянного тока, GT – тахогенератор (датчик ОС по скорости).
Принцип действия жесткой обратной связи по угловой скорости (рис. 6.4 а) заключается в следующем. С ростом нагрузки на валу двигателя уменьшается его угловая скорость и понижается сигнал с тахогенератора GT, находящегося на одном валу с двигателем М; напряжение снимаемое с якоря тахогенератора, пропорционально угловой скорости двигателя. Так как задающий сигнал (Uз.с.) остается при этом постоянным, то сигнал па входе регулятора РГ при понижении угловой скорости возрастает, следовательно, возрастает напряжение на выходе РГ(Uу) и соответственно ЭДС преобразователя П (Еп), что автоматически приводит к компенсации падения угловой скорости привода.
|
|
|
 Рис 6.4, а. Структурная схема САР угловой скорости с жёсткой ООС по скорости.
Рис 6.4, а. Структурная схема САР угловой скорости с жёсткой ООС по скорости.
Система уравнений всех элементов системы в установившемся режиме имеет вид:
k рс =U у /U вх; (1)
k п =Е п /U у;
U вх = U з.с. – γω;
U д =Е п –IR п;
E д =cω;
E п = k п k р.с U вх;
U д =E д +IR д;
M=cI.
здесь k рс =Uу/U вх; k п =Е п /Uу – соответственно коэффициенты усиления РГ и преобразователя П; U з.с. — задающее напряжение в системе с обратной связью по скорости; γ = U ос /ω — коэффициент передачи обратной связи по скорости; Е п, Е д – соответственно ЭДС преобразователя и двигателя; R п и R д – сопротивления преобразователя и двигателя.
С помощью (1) уравнение механической характеристики системы в общем виде можно представить как:
. (2)
Согласно (1) ЭДС преобразователя определяется как
Е п = k п U у = k п k р.с (U з.с - γw) = k (U з.с - γw). (3)
где k=k р.с k п – общий коэффициент передачи системы.
Заменим Е п в выражении (2) на (3) и после несложных преобразований получим в окончательном виде формулу механической характеристики ДПТ в замкнутой системе регулирования:
 ; (4)
; (4)
где R яΣ = R п + R д − суммарное сопротивление якорной цепи.
Первый член уравнения представляет угловую скорость идеального холостого хода в замкнутой системе (w 0 зам), а второй член – перепад угловой скорости (D w зам), обусловленный изменением момента нагрузки, т. е. разность значений установившихся скоростей электропривода до и после приложения заданной статической нагрузки.
Статизм в этой системе регулирования может быть определён как отношение перепада угловой скорости по уравнению (4) при М ном к текущему значению скорости идеального холостого хода:
|
|
|
δ=∆ω зам /ω 0зам /= М ном R яΣ /с2kU з.с. (6.10)
Из (6.10) следует, что статизм может быть сколь угодно малым с возрастанием коэффициента передачи всей системы.
Поэтому в системе с отрицательной обратной связью по скорости можно при большом коэффициенте передачи получить значительный диапазон регулирования максимум 1:2000.
На рис. 6.4, б приведены: предельная характеристика 1 при k→ оо, характеристики 2 и 2” при конечном значении коэффициента передачи (усиления) системы и характеристика двигателя в разомкнутой системе 3.
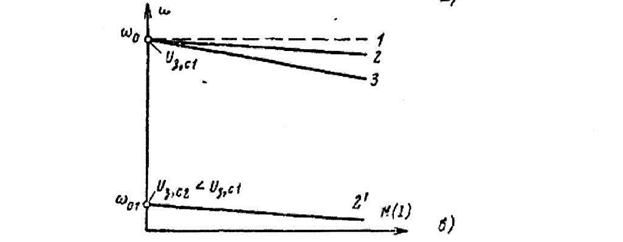
Рис. 6.4, б.
Следует отметить, что увеличение коэффициента усиления в рассматриваемой системе ограничено её динамической устойчивостью и чувствительностью к помехам.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 850; Нарушение авторских прав?; Мы поможем в написании вашей работы!