КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Математические основы теории ДВ-систем
|
|
|
|
Классификация дискретных САУ
Классификация САУ по признакам непрерывности, дискретности, линейности и видам квантования приведена на рис. 1.3.
По характеру сигналов САУ подразделяются но дискретные и непрерывные. Непрерывные системы в свою очередь делятся на линейные и нелинейные, частным случаем которых являются релейные системы.
Дискретные системы подразделяются на релейные и системы дискретного времени (импульсные и цифровые ДВ-системы). Таким образом дискретные релейные САУ - это частный случай нелинейных систем, что и отмечено на рис.3 двумя связями. Релейные системы исследуются методами, разработанными для анализа нелинейных САУ [5]. При малом числе уровней в цифровых САУ их свойства приближаются к свойствам релейных систем (двойной пунктир на рис. 1.3).
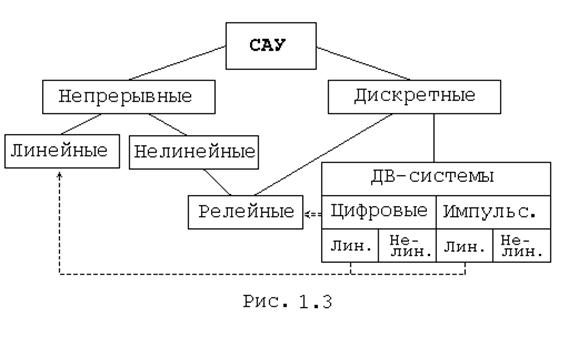
Импульсные и цифровые системы являются системами дискретного времени, а сигналы в этих системах - ДВ-сигналами [16]. При достаточно большом числе дискретов по уровню (достаточно большом числе разрядов АЦП и ЦАП) динамические свойства цифровых систем близки к свойствам импульсных систем, что позволяет изучать их одними методами. В ряде случаев квантование по уровню в цифровых системах можно учесть введением в систему так называемых шумов квантования.
ДВ-системы, в свою очередь, могут быть линейными и нелинейными. Здесь рассматриваются только линейные ДВ-системы.
По мере уменьшения периода дискретности свойства импульсных систем приближаются к свойствам непрерывных САУ и их можно исследовать методами исследования линейных систем (пунктирные связи на рис. 1.3). Такие системы называются квазинепрерывными [3].
В связи с развитием микропроцессорных средств и их большими возможностями в настоящее время домимнируют цифровые системы автоматического управления (ЦАС).
Структурная схема одномерной ЦАС приведена на рис. 1.4 [4]. Задающее воздействие g(t) преобразуется АЦП и импульсным элементом в коды g[n], поступающие на вход ЦВМ с периодом дискретности T. На второй вход ЦВМ поступают коды выходного сигнала y[n]. Сигналы g[n] и y[n] преобразуются ЦВМ в соответствии с заданным алгоритмом (законом управления) в последовательность кодов x[n], которые через ИЭ поступают на ЦАП и преобразуются в аналоговый сигнал, воздействующий на непрерывную часть ЦАС, то есть на объект управления). АЦП преобразует аналоговый выходной сигнал y(t) в последовательность кодов y[n].
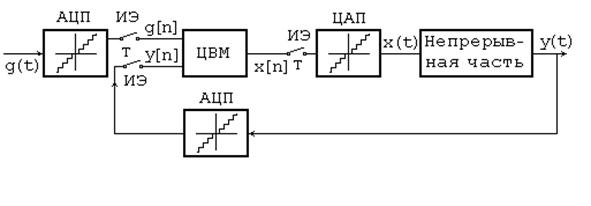
Вне зависимости от сложности решаемой ЦВМ задачи исходным для ее (задачи) решения обычно является разность входного и выходного сигналов [5]. Поэтому можно считать, что ЦВМ определяет разность между входным и выходным сигналами и формирует сигнал управления как функцию от этой разности.
Возможны и другие варианты включения в САУ импульсных элементов. Место включения ИЭ может оказаться предопределенным самим объектом управления. Например, при слежении за целью с помощью обзорной РЛС - ИЭ оказывается вне контура охваченного обратной связью (информация поступает приблизительно через период обзора РЛС в момент облучения цели). Задачей слежения является прогнозирование положения цели, а ошибка слежения - это разность между ее фактическим положением в последующий период обзора и прогнозированным системой слежения. Прогнозирование может происходить непрерывно, а внешнее воздействие - в дискретные моменты времени.
ЦАС обладают целым рядом положительных свойств, определяющих их широкое применение:
- возможность реализации сложных алгоритмов управления, обработки информации поступающей от различных источников, алгоритмов адаптации, обучения, самоорганизации (изменения структуры САУ, передаточных функции, и т.д.);
- возможность с помощью одного управляющего устройства управлять несколькими объектами, подключая их по очереди;
- возможность создания иерархических децентрализованных систем;
- стабильность функционирования (в цифровых системах после преобразования сигнала в цифру исчезают проблемы дрейфов нулей усилителей постоянного тока, изменений параметров ЭРЭ, точности настройки, шумовых помех и т.д.);
- возможность организации самоконтроля системы, диагностики;
- многократное использование одного канала связи;
- уменьшение весов, габаритов и энергопотребления (например, с системах радиоавтоматики заменой аналоговых временн¢ых, частотных, фазовых и пр. дискриминаторов, а также соответствующих устройств обработки информации и исполнительных устройств на цифровые);
- повышенная помехозащищенность (на интервале времени между квантованиями сигнала вход САУ оказывается отключенным);
- повышение надежности, снижение стоимости системы и др.
При управлении медленно меняющимися процессами (например, тепловыми) в цифровых системах
легко реализуются большие постоянные времени, дифференцирование и интегрирование медленно меняющихся процессов, что практически невозможно в аналоговых системах.
Недостатком ЦАС (и других ДВ-систем) является то, что их замыкание происходит с периодом дискретности. В остальное время ЦАС оказываются разомкнутыми, что, вообще говоря, может привести к ухудшению качества управления и к уменьшению запасов устойчивости. Квантование сигналов по уровню создает в ЦАС шумы квантования, что, вообще говоря, также снижает качество управления.
11) Примеры дискретных систем
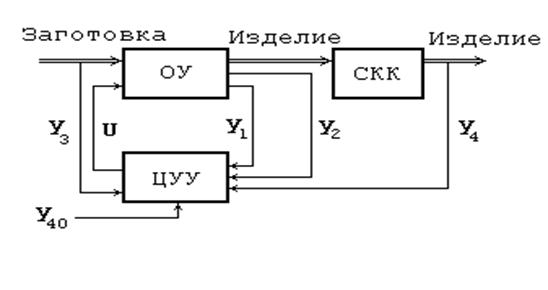
На рис. 1.5 изображена структурная схема автоматического управления качеством изделия [14]. На рисунке обозначено: ОУ - объект управления (технологическая линия); СКК - система контроля качества изделий; ЦУУ - цифровая система управления качеством изделия, обычно на базе микропроцессоров. Режим работы ОУ может изменяться векторным управляющим воздействием U. Для выработки управляющего воздействия используется следующая информация:
- режимы работы оборудования (вектор-столбец y 1);
- результаты пооперационного контроля в процессе изготовления изделия (вектор-столбец y 2);
- параметры поступившей на обработку заготовки (вектор-столбец y 3);
|
- результаты контроля готового изделия (вектор-столбец y 4).
Данная система автоматического управления дискретна по своей физической природе, так как информация о качестве произведенного поступает дискретно, после проведения контроля очередного изделия. Период дискретности (T) определяется временем, потребным для изготовления и контроля изделия. При ритмичном производстве величину T можно считать постоянной.
Для формирования управляющего воздействия (U) информация о параметрах заготовки, режиме работы оборудования, результатах пооперационного контроля обрабатывается совместно с результатами контроля качества соответствующего изделия.
Вектор сигнала рассогласования при изготовлении изделия с порядковым номером n (g [n]) формируется системой управления как разность g [n]= y 4[n]- y 40[n], где y 40 - заданные параметры изделия, которые, вообще говоря, могут изменяться в процессе изготовления. Для формирования различных законов управления (пропорционального, ПИ, ПД, ПИД и т.п.) используются результаты прошлых измерений g [n-1], g [n-2] и т.д. Использование информации о параметрах заготовки и результаты пооперационного контроля делают возможным адаптировать систему к их изменениям.
В результате воздействия на ОУ меняется режим его работы в сторону достижения, поставленных перед ЦУУ, целей (заданная точность изготовления, минимальный процент брака и т.п.). Алгоритм обработки информации в ЦУУ может включать анализ стабильности, устойчивости [14] и других характеристик технологического процесса. Результаты анализа, наряду с вектором рассогласования g [n], могут использоваться при формировании управления.
Данная система - многоконтурная, поскольку исходная информация и воздействие на ОУ - векторы.
Устройства управления клапаном, регулирующим подачу пара (УУК), и возбуждением генератора (УУВ) запоминают управляющие сигналы на период дискретности. Вообще говоря, периоды дискретности управления скоростью вращения турбины и возбуждением могут быть разными.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 356; Нарушение авторских прав?; Мы поможем в написании вашей работы!